






我使用的SDK的版本是Hi3559AV100_SDK_V2.0.3.0,海思官方没有can的驱动。从网上下载了一个PATCH,这个patch需要感谢此github https://github.com/benfounder/Hi3559AV100_CAN
-
diff --git a/arch/arm64/boot/dts/hisilicon/hi3559av100.dtsi b/arch/arm64/boot/dts/hisilicon/hi3559av100.dtsi index 117937f..b0b7e58 100644 --- a/arch/arm64/boot/dts/hisilicon/hi3559av100.dtsi +++ b/arch/arm64/boot/dts/hisilicon/hi3559av100.dtsi @@ -1342,5 +1342,26 @@ interrupt-names = "hi-wdg"; }; + can0: can@12070000 { + compatible = "hisilicon,hisi-can"; + reg = <0x12070000 0x1000>; + interrupts = <0 107 4>; + interrupt-names = "hi-can0"; + }; + + can1: can@12071000 { + compatible = "hisilicon,hisi-can"; + reg = <0x12071000 0x1000>; + interrupts = <0 108 4>; + interrupt-names = "hi-can1"; + }; + + can2: can@18040000 { + compatible = "hisilicon,hisi-can"; + reg = <0x18040000 0x1000>; + interrupts = <0 201 4>; + interrupt-names = "hi-can2"; + }; }; + }; diff --git a/drivers/net/can/Kconfig b/drivers/net/can/Kconfig index 22570ea..30a6e03 100644 --- a/drivers/net/can/Kconfig +++ b/drivers/net/can/Kconfig @@ -70,6 +70,12 @@ config CAN_AT91 This is a driver for the SoC CAN controller in Atmel's AT91SAM9263 and AT91SAM9X5 processors. +config CAN_HISI + tristate "Hisilicon 3559AV100 CAN controller" + depends on ARCH_HI3559AV100 + ---help--- + This is the driver for the SoC CAN controller in Hisilicon 3559AV100 processor. + config CAN_BFIN depends on BF534 || BF536 || BF537 || BF538 || BF539 || BF54x tristate "Analog Devices Blackfin on-chip CAN" diff --git a/drivers/net/can/Makefile b/drivers/net/can/Makefile index 26ba4b7..171e316 100644 --- a/drivers/net/can/Makefile +++ b/drivers/net/can/Makefile @@ -30,6 +30,7 @@ obj-$(CONFIG_CAN_SUN4I) += sun4i_can.o obj-$(CONFIG_CAN_TI_HECC) += ti_hecc.o obj-$(CONFIG_CAN_XILINXCAN) += xilinx_can.o obj-$(CONFIG_PCH_CAN) += pch_can.o +obj-$(CONFIG_CAN_HISI) += hi3559av100_can.o subdir-ccflags-y += -D__CHECK_ENDIAN__ subdir-ccflags-$(CONFIG_CAN_DEBUG_DEVICES) += -DDEBUG diff --git a/drivers/net/can/hi3559av100_can.c b/drivers/net/can/hi3559av100_can.c new file mode 100644 index 0000000..f53f56d --- /dev/null +++ b/drivers/net/can/hi3559av100_can.c @@ -0,0 +1,691 @@ +/* + * hi3559av100_can.c - CAN network driver for Hisilicon 3559A Soc CAN controller + * + * (C) 2018 by Ben Wang <benfounder@gmail.com> + * + * This software may be distributed under the terms of GNU General + * Public License ("GPL") version 2 as distributed in the 'COPYING' + * file from the main directory of the linux kernel source. + * + */ + +#include <linux/interrupt.h> +#include <linux/kernel.h> +#include <linux/module.h> +#include <linux/netdevice.h> +#include <linux/of.h> +#include <linux/platform_device.h> +#include <linux/rtnetlink.h> +#include <linux/skbuff.h> +#include <linux/string.h> +#include <linux/types.h> +#include <linux/printk.h> +#include <linux/spinlock.h> + +#include <linux/can/dev.h> +#include <linux/can/error.h> +#include <linux/can/led.h> + +#define CAN_CONTROL 0x0000 +#define CAN_STATUS 0x0004 +#define CAN_ERROR_COUNTER 0x0008 +#define BIT_TIMING 0x000C +#define CAN_INTERRUPT 0x0010 +#define CAN_TEST 0x0014 +#define BRP_EXTENSION 0x0018 +#define IF1_COMMAND_REQUEST 0x0020 +#define IF1_COMMAND_MASK 0x0024 +#define IF1_MASK1 0x0028 +#define IF1_MASK2 0x002C +#define IF1_ARBITRATION1 0x0030 +#define IF1_ARBITRATION2 0x0034 +#define IF1_MESSAGE_CONTROL 0x0038 +#define IF1_DATAA1 0x003C +#define IF1_DATAA2 0x0040 +#define IF1_DATAB1 0x0044 +#define IF1_DATAB2 0x0048 +#define IF2_COMMAND_REQUEST 0x0080 +#define IF2_COMMAND_MASK 0x0084 +#define IF2_MASK1 0x0088 +#define IF2_MASK2 0x008C +#define IF2_ARBITRATION1 0x0090 +#define IF2_ARBITRATION2 0x0094 +#define IF2_MESSAGE_CONTROL 0x0098 +#define IF2_DATAA1 0x009C +#define IF2_DATAA2 0x00A0 +#define IF2_DATAB1 0x00A4 +#define IF2_DATAB2 0x00A8 +#define TRANSMISSION_REQUEST1 0x0100 +#define TRANSMISSION_REQUEST2 0x0104 +#define NEW_DATA1 0x0120 +#define NEW_DATA2 0x0124 +#define INTERRUPT_PENDING1 0x0140 +#define INTERRUPT_PENDING2 0x0144 +#define MESSAGE_VALID1 0x0160 +#define MESSAGE_VALID2 0x0164 + +struct hisi_can_priv { + struct can_priv can; /* must be the first member */ + void __iomem *reg_base; + spinlock_t lock; + u32 free_mailbox; + u32 can_status; +}; + +static u32 std_recv_map = 0x00000FFF; +static u32 ext_recv_map = 0x00FFF000; +static u32 all_send_map = 0xFF000000; +static u8 send_start_index = 24; + +static void hisi_can_init(struct hisi_can_priv *priv) +{ + u32 index, reg; + const struct can_bittiming *bt = &(priv->can.bittiming); + + /* Step 1 */ + writel(0x01, priv->reg_base+CAN_CONTROL); + /* Step 2 */ + writel(0xF3, priv->reg_base+IF1_COMMAND_MASK); + for (index = 1; index <= 32; index++) { + /* Step 3 */ + writel(index, priv->reg_base+IF1_COMMAND_REQUEST); + /* Step 4 */ + do { + reg = readl(priv->reg_base+IF1_COMMAND_REQUEST); + } while (reg & 0x8000); + } + /* Step 5 */ + writel(0x41, priv->reg_base+CAN_CONTROL); + /* Step 6 */ + reg = 0; + reg |= (bt->phase_seg2 - 1) << 12; + reg |= (bt->phase_seg1 + bt->prop_seg - 1) << 8; + reg |= (bt->sjw - 1) << 6; + reg |= (bt->brp - 1); + writel(reg, priv->reg_base+BIT_TIMING); + /* Step 7 */ + writel(0x0F, priv->reg_base+CAN_CONTROL); + /* Step 8 */ + writel(0x0E, priv->reg_base+CAN_CONTROL); + return; +} + +static void hisi_can_uninit(struct hisi_can_priv *priv) +{ + /* Step 1 */ + writel(0x01, priv->reg_base+CAN_CONTROL); + return; +} + +static int hisi_can_preread(struct hisi_can_priv *priv, u8 index) +{ + u32 reg; + u32 map = 1; + u8 end; + + /* Step 1 */ + map <<= index - 1; + if (0 != (map & std_recv_map)) { + writel(0x8000, priv->reg_base+IF2_ARBITRATION2); + writel(0x0000, priv->reg_base+IF2_ARBITRATION1); + map <<= 1; + if (0 == (map & std_recv_map)) + end = 1; + else + end = 0; + } else if (0 != (map & ext_recv_map)) { + writel(0xC000, priv->reg_base+IF2_ARBITRATION2); + writel(0x0000, priv->reg_base+IF2_ARBITRATION1); + if (0 == (map & ext_recv_map)) + end = 1; + else + end = 0; + } +#if 0 + else if (index <= 15) { + writel(0x9000, priv->reg_base+IF2_ARBITRATION2); + writel(0x0000, priv->reg_base+IF2_ARBITRATION1); + } else if (index <= 16) { + writel(0xE000, priv->reg_base+IF2_ARBITRATION2); + writel(0x0000, priv->reg_base+IF2_ARBITRATION1); + } +#endif + else { + return -1; + } + /* Step 2 */ + writel(0xD000, priv->reg_base+IF2_MASK2); + /* Step 3 */ + writel(0xFFFF, priv->reg_base+IF2_MASK1); + /* Step 4 */ + if (end) { + writel(0x1488, priv->reg_base+IF2_MESSAGE_CONTROL); + } else { + writel(0x1408, priv->reg_base+IF2_MESSAGE_CONTROL); + } + /* Step 5 */ + writel(0x00F3, priv->reg_base+IF2_COMMAND_MASK); + /* Step 6 */ + reg = index; + reg |= 0x8000; + reg &= 0x803F; + writel(reg, priv->reg_base+IF2_COMMAND_REQUEST); + return 0; +} + +static void hisi_can_read(struct hisi_can_priv *priv, u8 index, struct can_frame *cf) +{ + u32 reg; + + /* Step 1 */ + writel(0x7F, priv->reg_base+IF2_COMMAND_MASK); + /* Step 2 */ + reg = index; + reg |= 0x8000; + reg &= 0x803F; + writel(reg, priv->reg_base+IF2_COMMAND_REQUEST); + /* Step 3 */ + do { + reg = readl(priv->reg_base+IF2_COMMAND_REQUEST); + } while (reg & 0x8000); + /* Step 4 */ + reg = readl(priv->reg_base+IF2_ARBITRATION2); + if (reg & 0x4000) { + /* Extended Frame */ + cf->can_id = readl(priv->reg_base+IF2_ARBITRATION1) & 0xFFFF; + reg &= 0x1FFF; + reg <<= 16; + cf->can_id |= reg; + } else { + /* Standard Frame */ + reg = (reg >> 2) & 0x7FF; + cf->can_id = reg; + } + reg = readl(priv->reg_base+IF2_MESSAGE_CONTROL); + cf->can_dlc = (u8)(reg & 0xF); + reg = readl(priv->reg_base+IF2_DATAA1); + cf->data[0] = (u8)(reg & 0xFF); + cf->data[1] = (u8)((reg >> 8) & 0xFF); + reg = readl(priv->reg_base+IF2_DATAA2); + cf->data[2] = (u8)(reg & 0xFF); + cf->data[3] = (u8)((reg >> 8) & 0xFF); + reg = readl(priv->reg_base+IF2_DATAB1); + cf->data[4] = (u8)(reg & 0xFF); + cf->data[5] = (u8)((reg >> 8) & 0xFF); + reg = readl(priv->reg_base+IF2_DATAB2); + cf->data[6] = (u8)(reg & 0xFF); + cf->data[7] = (u8)((reg >> 8) & 0xFF); + return; +} + +static void hisi_can_write_finish(struct hisi_can_priv *priv, u8 index) +{ + u32 reg; + + /* Step 1 */ + writel(0x7F, priv->reg_base + IF2_COMMAND_MASK); + /* Step 2 */ + reg = index; + reg |= 0x8000; + reg &= 0x803F; + writel(reg, priv->reg_base + IF2_COMMAND_REQUEST); + /* Step 3 */ + do { + reg = readl(priv->reg_base + IF2_COMMAND_REQUEST); + } while (reg & 0x8000); + + return; +} + +static void hisi_can_write(struct hisi_can_priv *priv, u8 index, struct can_frame *cf) +{ + u32 reg; + + /* Step 1 */ + if (cf->can_id & CAN_EFF_FLAG) { + if (cf->can_id & CAN_RTR_FLAG) { + /* Remote EFF */ + reg = ((cf->can_id & CAN_EFF_MASK) >> 16) | 0xC000; + } else { + /* Data EFF */ + reg = ((cf->can_id & CAN_EFF_MASK) >> 16) | 0xE000; + } + writel(reg, priv->reg_base + IF1_ARBITRATION2); + reg = (cf->can_id & CAN_EFF_MASK) & 0xFFFF; + writel(reg, priv->reg_base + IF1_ARBITRATION1); + } else { + if (cf->can_id & CAN_RTR_FLAG) { + /* Remote SFF */ + reg = (cf->can_id & CAN_SFF_MASK) << 2 | 0x8000; + } else { + /* Data SFF */ + reg = (cf->can_id & CAN_SFF_MASK) << 2 | 0xA000; + } + writel(reg, priv->reg_base + IF1_ARBITRATION2); + writel(0, priv->reg_base + IF1_ARBITRATION1); + } + /* Step 2 */ + writel(0xDFFF, priv->reg_base + IF1_MASK2); + /* Step 3 */ + writel(0xFFFF, priv->reg_base + IF1_MASK1); + /* Step 4 */ + reg = 0x8980 | cf->can_dlc; + writel(reg, priv->reg_base + IF1_MESSAGE_CONTROL); + /* Step 5 */ + reg = ((u32)cf->data[1]) << 8; + reg |= (u32)cf->data[0]; + writel(reg, priv->reg_base + IF1_DATAA1); + reg = ((u32)cf->data[3]) << 8; + reg |= (u32)cf->data[2]; + writel(reg, priv->reg_base + IF1_DATAA2); + reg = ((u32)cf->data[5]) << 8; + reg |= (u32)cf->data[4]; + writel(reg, priv->reg_base + IF1_DATAB1); + reg = ((u32)cf->data[7]) << 8; + reg |= (u32)cf->data[6]; + writel(reg, priv->reg_base + IF1_DATAB2); + /* Step 6 */ + writel(0x00F3, priv->reg_base + IF1_COMMAND_MASK); + /* Step 7 */ + reg = 0x8000 | index; + writel(reg, priv->reg_base + IF1_COMMAND_REQUEST); + + return; +} + +static irqreturn_t hisi_can_irq(int irq, void *dev_id) +{ + struct net_device *dev = dev_id; + struct hisi_can_priv *priv = netdev_priv(dev); + struct net_device_stats *stats = &(dev->stats); + irqreturn_t handled = IRQ_NONE; + struct sk_buff *skb; + struct can_frame *cf; + u32 reg_status, reg_interrupt, reg_tmp, reg_pending, index, tmp; + unsigned long flags; + + reg_interrupt = readl(priv->reg_base + CAN_INTERRUPT); + handled = IRQ_HANDLED; + //printk(KERN_ERR "%s:%d reg_interrupt 0x%x\n", __FUNCTION__, __LINE__, reg_interrupt); + /* Check Error */ + if (reg_interrupt == 0x8000) { + reg_status = readl(priv->reg_base + CAN_STATUS); + //printk(KERN_ERR "%s:%d reg_status 0x%x\n", __FUNCTION__, __LINE__, reg_status); + writel(0x7, priv->reg_base + CAN_STATUS); + reg_tmp = priv->can_status ^ reg_status; + if (reg_tmp & 0x80) { + /* Boff change */ + if (reg_status & 0x80) { + /* bus-off */ + netdev_dbg(dev, "bus-off\n"); + netif_carrier_off(dev); + /* error msg */ +#if 0 + skb = alloc_can_err_skb(dev, &cf); + if (unlikely(!skb)) + goto exit; + + cf->can_id |= CAN_ERR_CRTL; + cf->data[1] = CAN_ERR_CRTL + + dev->stats.rx_packets++; + dev->stats.rx_bytes += cf->can_dlc; + netif_rx(skb); + hisi_can_error(cf); +#endif + /* restart controller */ + reg_tmp = readl(priv->reg_base + CAN_CONTROL); + reg_tmp |= 0x1; + writel(reg_tmp, priv->reg_base + CAN_CONTROL); + reg_tmp &= 0xFFFFFFFE; + writel(reg_tmp, priv->reg_base + CAN_CONTROL); + } else { + /* bus-on */ + netdev_dbg(dev, "restarted\n"); + netif_carrier_on(dev); + netif_wake_queue(dev); + } + } +#if 0 + if (reg_tmp & 0x20) { + /* Epass change */ + if (reg_status & 0x20) { + /* Passive Error */ + } else { + + } + } + if (reg_tmp & 0x40) { + /* Ewarn change */ + new_state = CAN_STATE_ERROR_WARNING; + } +#endif + priv->can_status = reg_status; + } else if ((reg_interrupt <= 0x20) && (reg_interrupt > 0)) { + /* Clean Interrupt */ + //readl(priv->reg_base + IF2_COMMAND_MASK); + //readl(priv->reg_base + IF2_COMMAND_REQUEST); + reg_tmp = readl(priv->reg_base + INTERRUPT_PENDING1); + reg_pending = reg_tmp; + reg_tmp = readl(priv->reg_base + INTERRUPT_PENDING2); + reg_pending |= reg_tmp << 16; + + /* Check Transmit Complete */ + reg_tmp = reg_pending & all_send_map; + //printk(KERN_ERR "%s:%d TX pending 0x%x\n", __FUNCTION__, __LINE__, reg_tmp); + if (reg_tmp) { + for (index = send_start_index; index < 32; index++) { + if (reg_tmp & (1UL << index)) { + hisi_can_write_finish(priv, index + 1); + can_get_echo_skb(dev, (index - send_start_index)); + stats->tx_packets++; + can_led_event(dev, CAN_LED_EVENT_TX); + spin_lock_irqsave(&(priv->lock), flags); + tmp = priv->free_mailbox; + priv->free_mailbox |= 1UL << index; + if (0 == tmp) + netif_wake_queue(dev); + spin_unlock_irqrestore(&(priv->lock), flags); + } + } + } + + /* Check Receive Complete */ + reg_tmp = reg_pending & std_recv_map; + //printk(KERN_ERR "%s:%d RX pending 0x%x\n", __FUNCTION__, __LINE__, reg_tmp); + if (reg_tmp) { + for (index = 0; index < send_start_index; index++) { + if (reg_tmp & (1UL << index)) { + skb = alloc_can_skb(dev, &cf); + if (unlikely(!skb)) { + stats->rx_dropped++; + printk(KERN_ERR "%s:%d Should never happen\n", __FUNCTION__, __LINE__); + goto exit; + } + hisi_can_read(priv, index + 1, cf); + hisi_can_preread(priv, index + 1); + stats->rx_packets++; + stats->rx_bytes += cf->can_dlc; + netif_rx(skb); + can_led_event(dev, CAN_LED_EVENT_RX); + } + } + } + } + +exit: + return handled; +} + +static int hisi_can_open(struct net_device *dev) +{ + struct hisi_can_priv *priv = netdev_priv(dev); + int err; + u8 index; + + /* check or determing and set bittime */ + err = open_candev(dev); + if (err) + goto out_close; + + /* register interrupt handler */ + if (request_irq(dev->irq, hisi_can_irq, IRQF_SHARED, dev->name, dev)) { + err = -EAGAIN; + goto out_close; + } + + can_led_event(dev, CAN_LED_EVENT_OPEN); + + /* start chip and queuing */ + hisi_can_init(priv); + priv->free_mailbox = all_send_map; + spin_lock_init(&(priv->lock)); + netif_start_queue(dev); + + for (index = 0; index < 32; index ++) { + if (std_recv_map & (1UL << index)) { + //printk(KERN_ERR "Listen standard data packet on mailbox %u\n", index+1); + hisi_can_preread(priv, index+1); + } else + break; + } + + return 0; + +out_close: + close_candev(dev); + + return err; +} + +static int hisi_can_close(struct net_device *dev) +{ + struct hisi_can_priv *priv = netdev_priv(dev); + + netif_stop_queue(dev); + hisi_can_uninit(priv); + + free_irq(dev->irq, dev); + + close_candev(dev); + + can_led_event(dev, CAN_LED_EVENT_STOP); + + return 0; +} + +static netdev_tx_t hisi_can_start_xmit(struct sk_buff *skb, struct net_device *dev) +{ + struct hisi_can_priv *priv = netdev_priv(dev); + struct net_device_stats *stats = &dev->stats; + struct can_frame *cf = (struct can_frame *)skb->data; + unsigned long flags; + u8 index; + + if (can_dropped_invalid_skb(dev, skb)) + return NETDEV_TX_OK; + + spin_lock_irqsave(&(priv->lock), flags); + //printk(KERN_ERR "%s:%d free_mailbox 0x%08x\n", __FUNCTION__, __LINE__, priv->free_mailbox); + for (index = send_start_index; index < 32; index ++) { + if (priv->free_mailbox & (1UL << index)) { + priv->free_mailbox &= ~(1UL << index); + break; + } + } + spin_unlock_irqrestore(&(priv->lock), flags); + + if (unlikely(index == 32)) { + netif_stop_queue(dev); + netdev_err(dev, "BUG! TX buffer full when queue awake (0x%08x)!\n", priv->free_mailbox); + return NETDEV_TX_BUSY; + } + + can_put_echo_skb(skb, dev, (index - send_start_index)); + + hisi_can_write(priv, index+1, cf); + + stats->tx_bytes += cf->can_dlc; + + return NETDEV_TX_OK; +} + +static int hisi_can_set_mode(struct net_device *dev, enum can_mode mode) +{ + struct hisi_can_priv *priv = netdev_priv(dev); + + switch (mode) { + case CAN_MODE_START: + hisi_can_init(priv); + netif_wake_queue(dev); + break; + default: + return -EOPNOTSUPP; + } + return 0; +} + +static int hisi_can_get_berr_counter(const struct net_device *dev, + struct can_berr_counter *bec) +{ + const struct hisi_can_priv *priv = netdev_priv(dev); + u32 reg; + reg = readl(priv->reg_base+CAN_ERROR_COUNTER) & 0x7FFF; + bec->rxerr = (u16)(reg >> 8); + bec->txerr = (u16)(reg & 0xFF); + return 0; +} + +static const struct can_bittiming_const hisi_bittiming_const = { + .name = KBUILD_MODNAME, + .tseg1_min = 1, + .tseg1_max = 16, + .tseg2_min = 1, + .tseg2_max = 8, + .sjw_max = 4, + .brp_min = 1, + .brp_max = 64, + .brp_inc = 1, +}; + +static const struct net_device_ops hisi_can_netdev_ops = { + .ndo_open = hisi_can_open, + .ndo_stop = hisi_can_close, + .ndo_start_xmit = hisi_can_start_xmit, + .ndo_change_mtu = can_change_mtu, +}; + +static int hisi_can_set_bittiming(struct net_device *dev) +{ + struct hisi_can_priv *priv = netdev_priv(dev); + + hisi_can_init(priv); + return 0; +} + +static int hisi_can_probe(struct platform_device *pdev) +{ + struct net_device *dev; + struct hisi_can_priv *priv; + struct resource *res; + void __iomem *addr; + int err, irq; + + res = platform_get_resource(pdev, IORESOURCE_MEM, 0); + irq = platform_get_irq(pdev, 0); + if (!res || irq <= 0) { + err = -ENODEV; + goto exit; + } + + if (!request_mem_region(res->start, + resource_size(res), + pdev->name)) { + err = -EBUSY; + goto exit; + } + + addr = ioremap_nocache(res->start, resource_size(res)); + if (!addr) { + err = -ENOMEM; + goto exit_release; + } + + dev = alloc_candev(sizeof(struct hisi_can_priv), 16); + if (!dev) { + err = -ENOMEM; + goto exit_iounmap; + } + + dev->netdev_ops = &hisi_can_netdev_ops; + dev->irq = irq; + dev->flags |= IFF_ECHO; + + priv = netdev_priv(dev); + priv->reg_base = addr; + priv->can.clock.freq = 50000000; + priv->can.bittiming_const = &hisi_bittiming_const; + priv->can.do_set_bittiming = &hisi_can_set_bittiming; + priv->can.do_set_mode = hisi_can_set_mode; + priv->can.do_get_berr_counter = hisi_can_get_berr_counter; + priv->can.ctrlmode_supported = CAN_CTRLMODE_BERR_REPORTING | CAN_CTRLMODE_3_SAMPLES | CAN_CTRLMODE_LISTENONLY; + + platform_set_drvdata(pdev, dev); + SET_NETDEV_DEV(dev, &pdev->dev); + + err = register_candev(dev); + if (err) { + dev_err(&pdev->dev, "registering netdev failed\n"); + goto exit_free; + } + + devm_can_led_init(dev); + + dev_info(&pdev->dev, "device registered (reg_base=%p, irq=%d)\n", + priv->reg_base, dev->irq); + + return 0; + +exit_free: + free_candev(dev); +exit_iounmap: + iounmap(addr); +exit_release: + release_mem_region(res->start, resource_size(res)); +exit: + return err; +} + +static int hisi_can_remove(struct platform_device *pdev) +{ + struct net_device *dev = platform_get_drvdata(pdev); + struct hisi_can_priv *priv = netdev_priv(dev); + struct resource *res; + + unregister_netdev(dev); + + iounmap(priv->reg_base); + + res = platform_get_resource(pdev, IORESOURCE_MEM, 0); + release_mem_region(res->start, resource_size(res)); + + free_candev(dev); + + return 0; +} + +#if defined(CONFIG_OF) +static const struct of_device_id hisi_can_dt_ids[] = { + { + .compatible = "hisilicon,hisi-can", + }, { + /* sentinel */ + } +}; +MODULE_DEVICE_TABLE(of, hisi_can_dt_ids); +#endif + +static const struct platform_device_id hisi_can_id_table[] = { + { + .name = "hisi_can", + }, { + /* sentinel */ + } +}; +MODULE_DEVICE_TABLE(platform, hisi_can_id_table); + +static struct platform_driver hisi_can_driver = { + .probe = hisi_can_probe, + .remove = hisi_can_remove, + .driver = { + .name = "hisi_can", + .of_match_table = of_match_ptr(hisi_can_dt_ids), + }, + .id_table = hisi_can_id_table, +}; + +module_platform_driver(hisi_can_driver); + +MODULE_AUTHOR("Ben Wang <benfounder@gmail.com>"); +MODULE_LICENSE("GPL v2"); +MODULE_DESCRIPTION(KBUILD_MODNAME " Hi3559AV100 CAN driver");然后 cp arch/arm64/configs/hi3559av100_arm64_big_little_emmc_defconfig .config
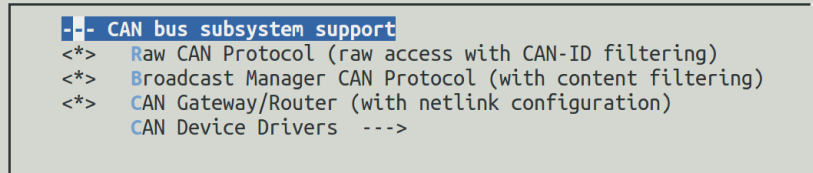
make ARCH=arm64 CROSS_COMPILE=aarch64-himix100-linux- menuconfig
-
之后重新编译 内核即可
配置CAN1,波特率100000
ip link set can1 down
ip link set can1 type can bitrate 100000
ip -details link show can1
ip link set can1 up发送CAN信息
cansend can1 1f334455#1122334455667788_B
接受ID为123 的can标准帧
candump can1,123:7ff
接收到CAN信息
————————————————
版权声明:本文为CSDN博主「sooth2008」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/sooth2008/article/details/114990764















 822
822











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









