







 磁编码器是一种基于磁电原理的编码器,利用霍尔传感器检测磁场变化以确定旋转位置。它由磁盘、传感器和调节电路组成,分为增量式和绝对值式。磁编码器具有坚固耐用、抗干扰能力强的优点,但也存在易受电磁干扰和温度漂移的影响。应用广泛,包括电机旋转位置反馈、太阳能跟踪系统等。磁编码器的发展趋势是提高分辨率、精度,并采用无电池多圈技术。
磁编码器是一种基于磁电原理的编码器,利用霍尔传感器检测磁场变化以确定旋转位置。它由磁盘、传感器和调节电路组成,分为增量式和绝对值式。磁编码器具有坚固耐用、抗干扰能力强的优点,但也存在易受电磁干扰和温度漂移的影响。应用广泛,包括电机旋转位置反馈、太阳能跟踪系统等。磁编码器的发展趋势是提高分辨率、精度,并采用无电池多圈技术。
磁编码器是以磁电原理技术生产的编码器。
当电流通过一个位于磁场中的导体的时候,磁场会对导体中的电子产生一个垂直于电子运动方向上的的作用力,从而在垂直于导体与磁感线的方向上产生电势差。
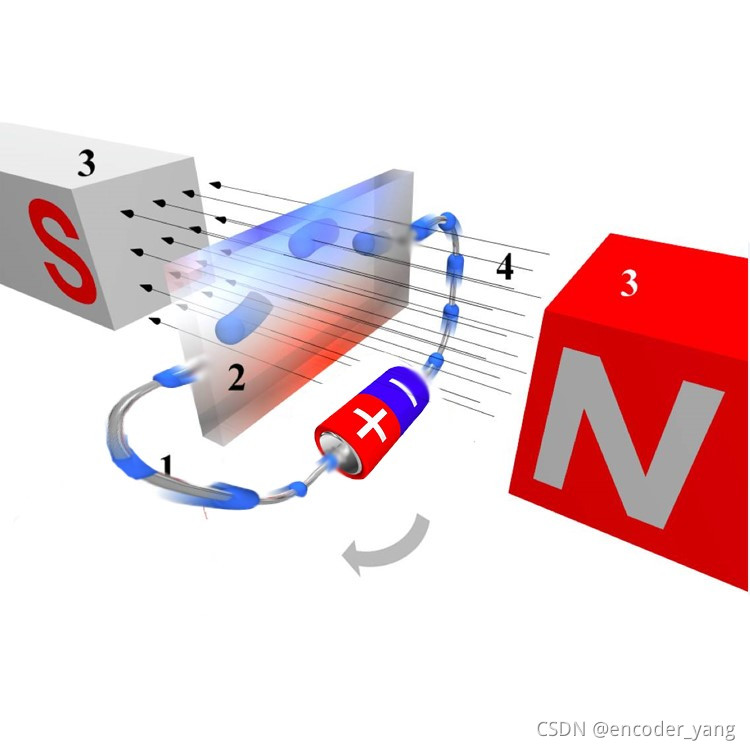
如果让施加在这个导体上的磁场以电流流经路径为轴线,按照上图箭头所示的方向旋转,那么这个霍尔电势差就会因为磁场与导体之间角度的改变而发生变化,而这个电势差的变化趋势,与之前一文中次级线圈旋转时的输出电压一样,是一条正弦曲线。因此,基于这个通电导体两侧的电压,就可以反推计算出磁场旋转的角度了。
这就是磁编码器测量旋转位置反馈时的基本工作机理了。测量的旋转位置通过霍尔传感器进行放大和转化。
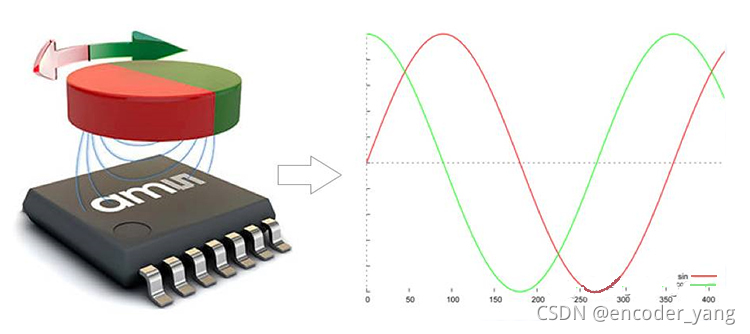
磁性编码器上用的霍尔传感器(芯片),一般都有着极高的集成度,不仅将霍尔半导体元件和相关的信号处理和调节电路整合在一起,同时还可以集成各种不同类型的信号输出模块,例如:正余弦模拟量信号、方波数字电平信号或者总线通讯输出单元。
磁编码器构成:
磁编码器依赖于三个主要组件:磁盘,传感器和调节电路。磁盘已磁化,其圆周上有许多磁极。传感器检测磁盘旋转时磁场的变化,并将此信息转换为正弦波。传感器可以是感应电压变化的霍尔效应器件,也可以是感应磁场变化的磁阻器件。调节电路对信号进行倍增,分频或内插以产生所需的输出。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7200
7200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









