







论文实验总结
一、一种高效的多目标蚁群算法用于异构无人机任务分配
原文地址:https://doi.org/10.1016/j.jocs.2021.101545
-
论文背景
- 将异构无人机协同任务分配问题定义为一个包含三个优化目标的约束多目标优化问题。针对上述问题,提出了一种高效的多蚁群优化算法(MOACO)。该算法设计了一种新的信息素更新机制和四种新的启发式信息,提高了算法的搜索效率和解的多样性。 编码环境
- Intel ® Core™ i7-9750H CPU,内存为8gb。算法在MATLAB R2019a中编码 测试场景
- 基于SEAD操作,在场景设置中考虑了无人机与目标的异构性、运动学特性和约束条件。目标部署在一个100 ×100平方公里的矩形区域,所有无人机也在矩形区域内飞行。 具体测试
-
1、
6个目标和10架无人机参与了模拟。
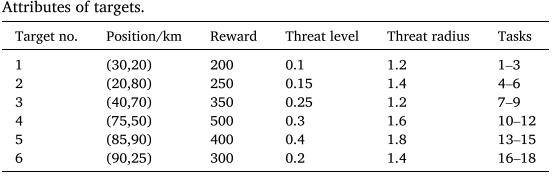
Uj (j = 1、2、3)为侦察无人机(类型1),Uj (j = 4、5、6)为攻击无人机(类型2),Uj (j = 7、8、9、10)为实用无人机(类型3),
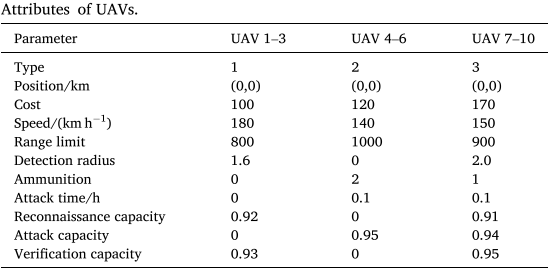
无人机从原点起飞
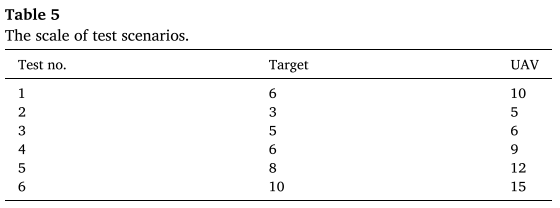
2、 为了进一步验证MOACO算法的性能,本文对不同尺度问题下的算法性能进行了研究。
另外设置了5个测试场景。在测试2和3中,目标和无人机的数量减少了。在测试4中,我们主要改变目标的位置和无人机的相关参数。在测试5和6中,我们研究了当问题规模变大时算法性能的变化。
除了提出的算法外,论文还将贪婪算法与标准多目标群体优化算法(SMOPSO)、标准多目标蚁群优化算法(SMOACO)和多目标多蚁群优化的变体(MOACO*)三种多目标优化算法应用于任务分配问题的求解,并进行了性能比较。
针对多目标优化,比较了最终Pareto解集的IGD标准差、IGD均值和HV均值。
二、基于多基因遗传算法的异构多无人机协同任务分配
原文地址:知网
-
论文背景
- 本文以 SEAD 任务为背景,考虑多异构无人机任务时序约束,同时考虑异构无人机携带弹药火力不同的情况,以任务完成时间和攻击收益为综合性能指标函数,建立了 CMTAP 模型。提出了基于新的多染色体编码机制的改进遗传算法,结合特定的交叉和变异算子,避免在初始化和进化过程中产生死锁个体。基于任务分配结果,同时考虑无人机的最小转弯半径,采用 Dubins 路径加附加运动的方式进行了无人机的路径规划与协调,得到了每个无人机的可飞航迹。 编码环境
- 算法在MATLAB R2017b 语言环境中编码 测试场景
-
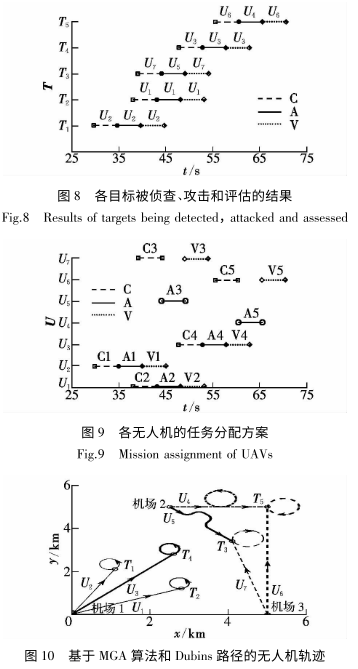
基于任务分配结果,同时考虑无人机的最小转弯半径,采用 Dubins 路径加附加运动的方式
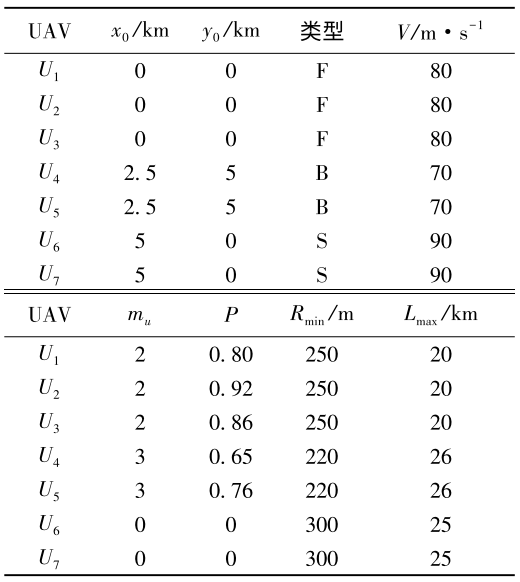
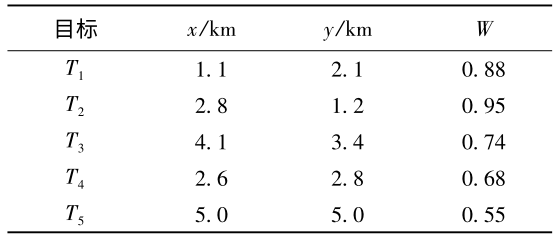
进行了无人机的路径规划与协调,得到了每个无人机的可飞航迹。战斗机(F)、侦察机(S)和轰炸机(B)3 种类型。其任务分别为:(1)战斗机:侦察 C、攻击 A、评估 V;(2)侦察机:侦察 C、评估 V;(3)轰炸机:攻击 A。
具体测试
-
1、
5个目标和7架无人机参与了模拟,无人机执行一个任务所需的时间为5 s。
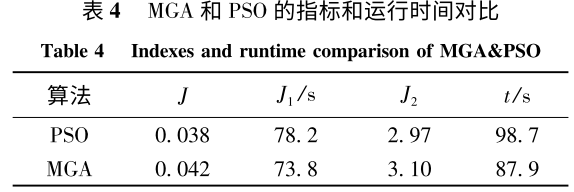
2、 MGA 与 PSO 算法对比
与文献中基于粒子群(PSO)的任务分配算法
Sujit P,Georget J,Beard R.Multiple UAV task allocation using particle swarm optimization [R]. AIAA-2008- 6837,2008.

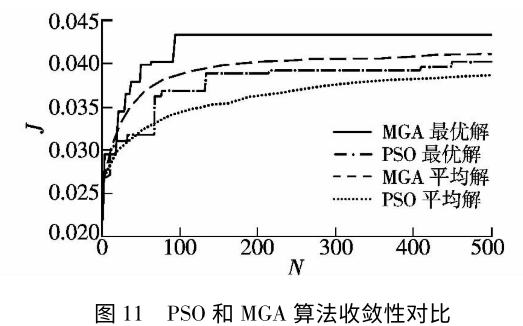
任务执行时间 J1为所有执行任务无人机的最大飞行时间,总体攻击收益 J2体现了所有无人机对目标总的毁伤效果。















 13万+
13万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









