







 本文介绍了一个基于双目立体视觉的测距项目,利用OpenCV2.4.11、VS2010和Matlab进行开发。通过三角形原理和棋盘标定法获取摄像头参数并消除畸变,进行立体校正和SAD匹配算法实现图像匹配,从而计算物体深度信息。参考了相关论文和博客资源,提供了详细的技术流程。
本文介绍了一个基于双目立体视觉的测距项目,利用OpenCV2.4.11、VS2010和Matlab进行开发。通过三角形原理和棋盘标定法获取摄像头参数并消除畸变,进行立体校正和SAD匹配算法实现图像匹配,从而计算物体深度信息。参考了相关论文和博客资源,提供了详细的技术流程。
用到的工具和平台
Opencv2.4.11
VS2010
Matlab
参考论文和Blog
基于双目立体视觉的物体深度信息提取系统研究_刘维(硕士论文)
Learning OpenCV十一、十二章
摄像头的连接

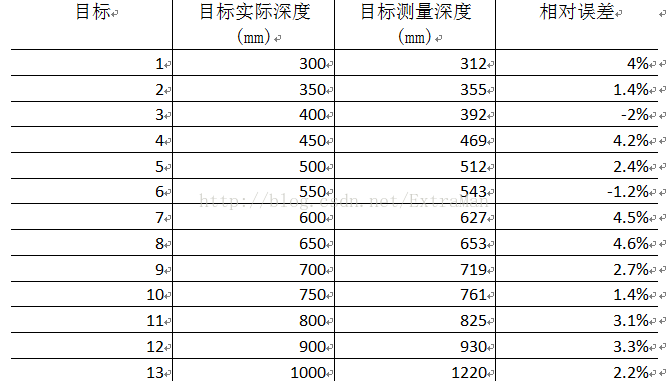
技术参数(最终效果)
———————————————------———————————————————
本文主要是讲实现,并不详细讲述数学推理。
测距原理
测距原理是利用三角形原理(当然这个是对于平面模型而言,立体模型则用矩阵来表示),原理如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 151
151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









