






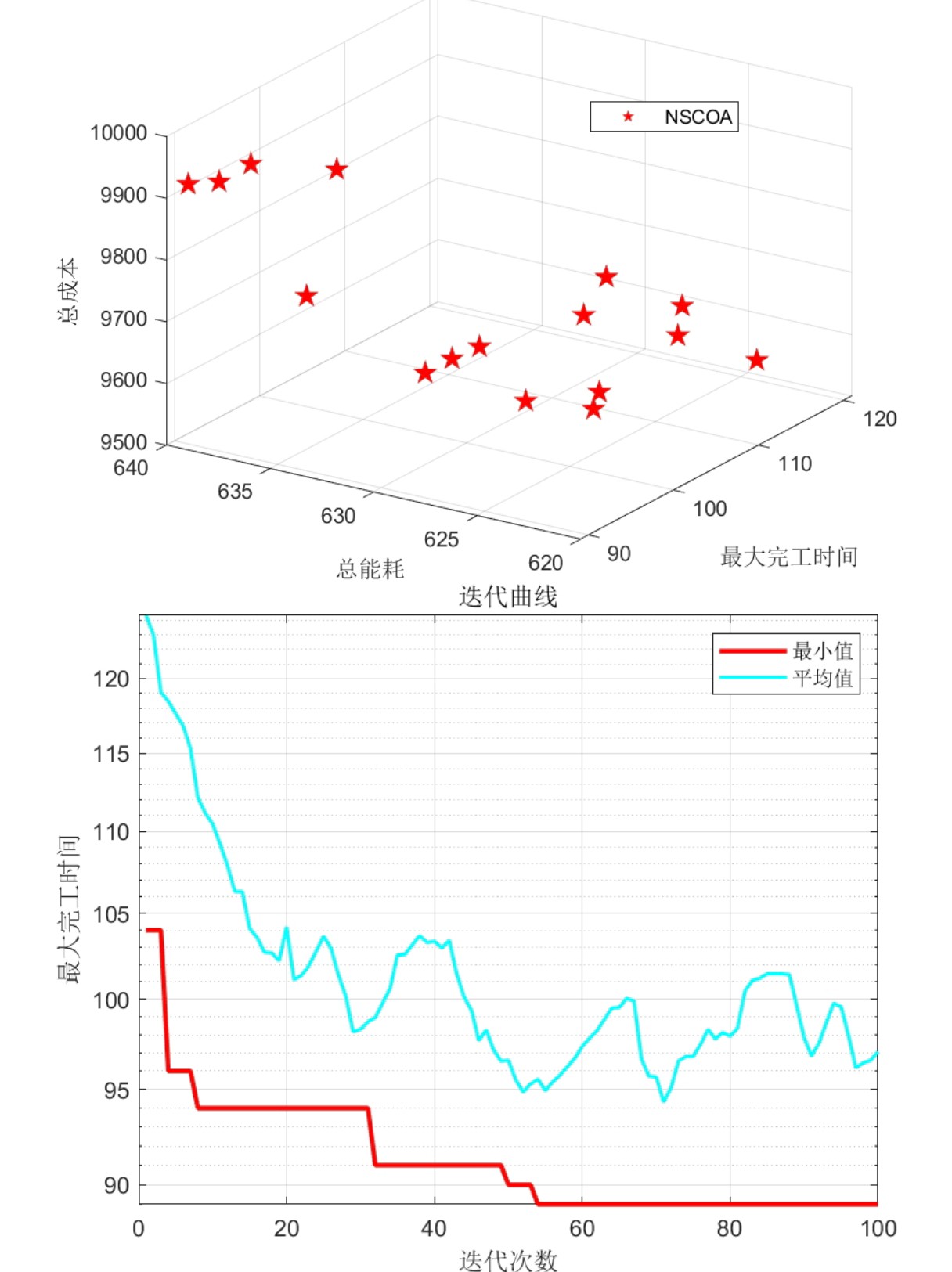
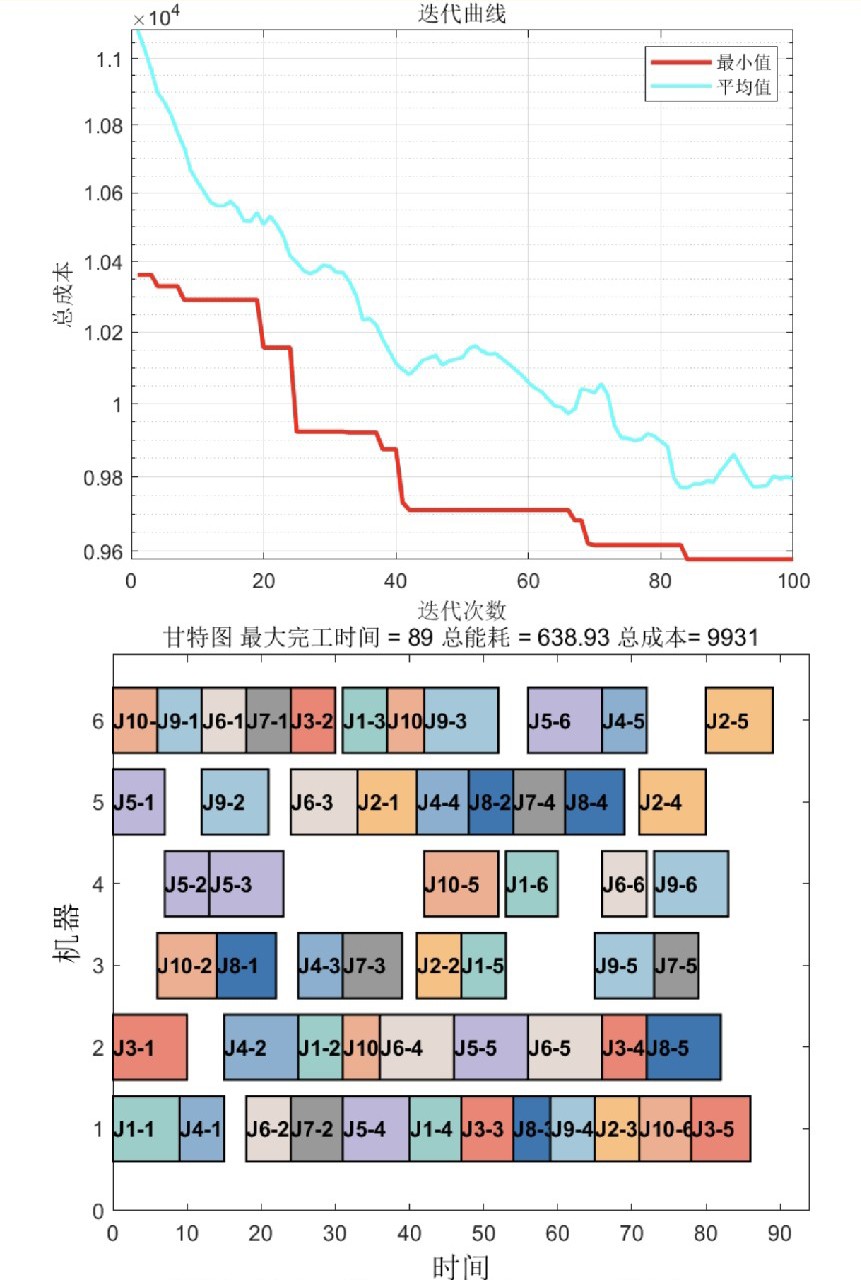
基于非支配排序的多目标小龙虾优化算法求解柔性作业车间调度问题FJSP(MATLAB代码)
https://mbd.pub/o/bread/mbd-ZZ2Wlp9x
ID:46168778370501730
智能优化算法MATLAB
基于自抗扰控制器ADRC的永磁同步电机FOC深度分析
一、引言
随着工业自动化的飞速发展,电机控制技术的创新日新月异。永磁同步电机(PMSM)因其高效率、高精度和低噪音等优点被广泛应用。场向量控制(FOC)作为PMSM的主要控制策略之一,其性能优化一直是研究的热点。本文将探讨基于自抗扰控制器(ADRC)的PMSM FOC,尤其是转速环采用ADRC与传统的PI控制器的对比分析。
二、自抗扰控制器(ADRC)概述
自抗扰控制器(ADRC)是一种现代控制策略,其设计理念源于对系统内部干扰的主动抑制。ADRC主要由跟踪微分器、扰动估计器、非线性状态误差反馈和非线性控制分配等环节组成。其中,扩展状态观测器(ESO)是ADRC的核心部分,用于估计系统的状态和总扰动。
三、基于ADRC的PMSM转速环控制
在PMSM的FOC中,转速环作为外层控制环,对电机的转速进行控制。采用ADRC的转速环控制,能够在面对系统内外部干扰时,快速稳定系统的转速。通过与传统PI控制器的对比分析,ADRC表现出更优越的控制性能。
- 响应速度:ADRC由于具有快速的扰动抑制能力,使得电机在启动、变速等动态过程中,响应速度更快,动态性能更优。
- 稳定性:在面对系统参数变化、负载扰动等情况下,ADRC能够更有效地抑制系统的震荡,保持系统的稳定运行。
- 抗干扰性:ADRC通过估计并补偿系统总扰动,增强了系统的抗干扰能力,提高了系统的鲁棒性。
四、ADRC中ESO的改进与优化
为了进一步提高ADRC的性能,对其中的ESO进行优化改进是关键。通过改进ESO的算法,提高其估计精度和响应速度,进而提升整个ADRC系统的控制性能。具体的改进方法包括但不限于:采用高阶ESO、优化非线性反馈环节、引入自适应机制等。
五、三种速度控制器的对比分析
除了传统的PI控制器和ADRC外,还有一些其他的速度控制器如模糊控制器、神经网络控制器等。这些控制器各有优缺点,下面进行简要的对比分析。
- PI控制器:应用广泛,参数整定简单,但面对复杂环境和系统扰动时,控制性能可能下降。
- ADRC控制器:具有快速响应、强抗干扰性和良好的稳定性,但需要复杂的设计和参数整定。
- 模糊控制器:适应于模型不确定性系统,能够处理复杂的非线性问题,但对设计者的经验要求较高。
- 神经网络控制器:通过学习系统的动态特性,实现优化控制,但计算复杂度高,实时性较差。
六、结论
基于自抗扰控制器ADRC的永磁同步电机FOC具有广阔的应用前景。通过对转速环采用ADRC与传统PI控制器的对比分析,以及ESO的改进与优化,验证了ADRC在PMSM控制中的优越性。未来,随着控制理论和技术的进步,ADRC在电机控制领域的应用将更加广泛。
七、展望
未来,我们可以进一步研究如何将ADRC与其他控制策略相结合,如滑模控制、预测控制等,以进一步提高PMSM的控制性能。此外,随着人工智能技术的发展,结合机器学习、深度学习等技术,优化ADRC的参数和设计,将为我们提供更广阔的研究空间。
相关的代码,程序地址如下:http://matup.cn/778370501730.html
















 351
351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









