







以前学的时候都是囫囵吞枣,能搞过就得了。现在有了点时间可以静下来看看。。
还是分成点来看吧。
1 状态转移方程
以小车运行为例子
一个车匀速在一维坐标前行,速度是2米每秒,起始点是0。如何描述
设 𝑥(𝑡) 表示车辆在时间 𝑡t 时的位置。根据匀速运动的定义,车辆的速度是恒定的,为 2 米每秒。因此,车辆的位置随时间的变化可以用以下线性方程表示:
𝑥(𝑡)=2𝑡
其中,𝑥(𝑡) 表示车辆在时间 𝑡t 时的位置(单位:米),𝑡 表示时间(单位:秒),2𝑡 表示车辆在时间 𝑡t 时已经行驶的距离。
上面是我们常用的理解,在线性代数中,这个应该怎么写呢?
我们可以将位置 𝑥(𝑡)视为一个列向量,时间 𝑡 视为一个标量,速度 𝑣 视为一个常数。
假设时间从 𝑡0 到 𝑡𝑓,我们可以将时间区间分成 𝑁 个离散时间步长。每个时间步长的长度为 Δ𝑡=𝑡𝑓−𝑡0𝑁。
我们可以使用以下线性方程来描述车辆的位置随时间的变化:
𝑥(𝑡𝑖+1)=𝑥(𝑡𝑖)+𝑣Δ𝑡
其中 𝑥(𝑡𝑖)表示车辆在时间 𝑡𝑖ti 的位置,𝑥(𝑡𝑖+1) 表示车辆在时间 𝑡𝑖+1 的位置,𝑣 表示车辆的速度。
将其转换成矩阵形式:

其中,第一个矩阵是转移矩阵 𝐴,它将 𝑥(𝑡𝑖)映射到 𝑥(𝑡𝑖+1);第二个矩阵是状态向量,包含了初始位置 𝑥(𝑡0) 和车辆的速度 𝑣。
另外一种写法:
设状态向量为 x=[x,v]T,其中 x 表示位置,v 表示速度。则状态转移方程可以表示为:

其中,xt+1 是下一个时刻的状态向量,xt 是当前时刻的状态向量,a 是常量加速度。第一个矩阵是状态转移矩阵,描述了状态变量的演变规律;第二个矩阵描述了加速度对状态变量的影响。
观测方程可以根据具体情况来定义,一般形式为 zt=Hxt+noise,其中 zt 是观测值,H 是观测矩阵,描述了观测如何与状态相关联。
初始状态可以表示为 x0=[x0,v0]T,其中 x0 和 v0 是初始位置和速度。
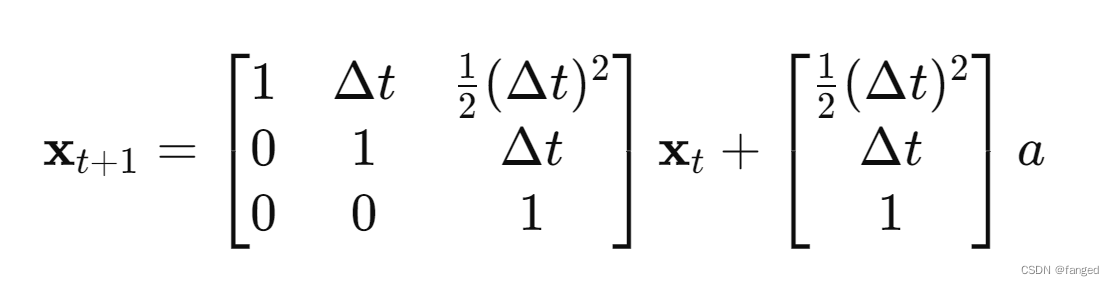
还有一种写法是包含加速度:
如果状态向量需要增加加速度,则状态向量的维度需要扩展,同时更新状态转移方程和观测方程。假设状态向量为 x=[x,v,a]T,其中 x 表示位置,v 表示速度,a 表示加速度,则状态转移方程可以表示为:
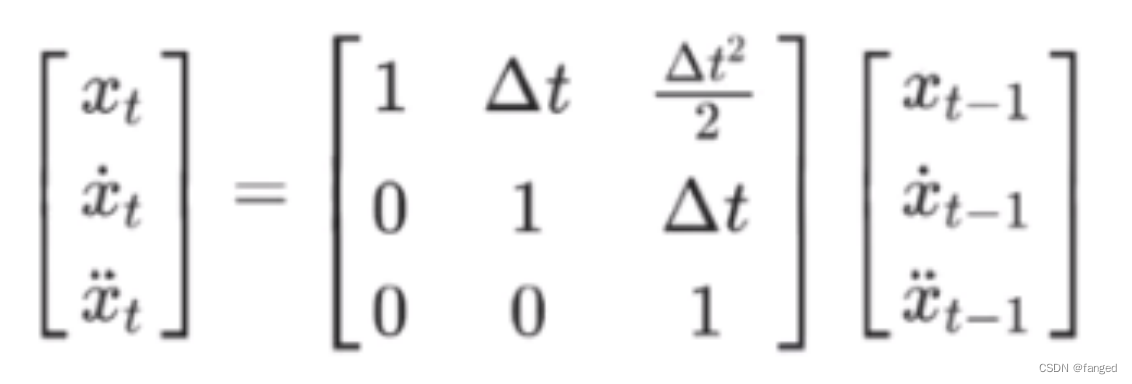
其中xt是初始位置,x一点是速度,x两点是加速度。上面的矩阵,等价于:
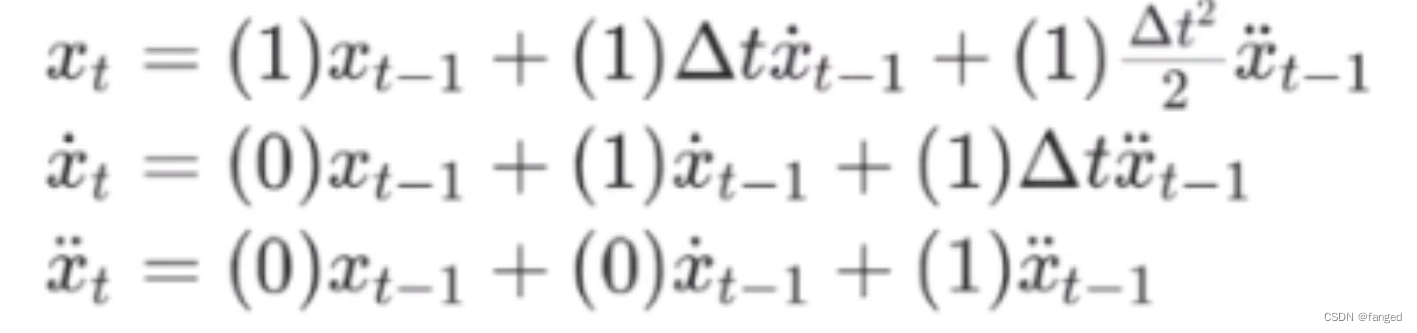
这里再复习一下矩阵乘法。矩阵乘法其实就是方程的另一种表现形式,写成矩阵并不是为了装逼,在计算机中,矩阵乘法可以显著加速运算(算法矩阵提速原理-CSDN博客),所以都写成矩阵模式。个人觉得有些教程还可以先写成方程组的形式,方便理解。
假设我们有一个 2×2 矩阵 A 和一个 2×1 矩阵 B:
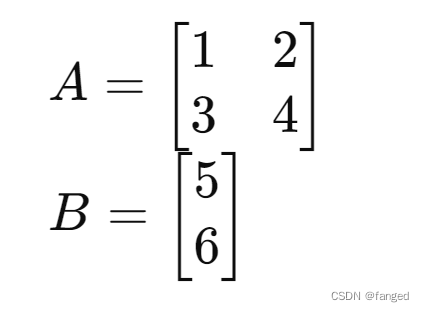
我们想要计算它们的乘积 C=A×B。
c1=(1×5)+(2×6)=5+12=17
c2=(3×5)+(4×6)=15+24=39
2 协方差矩阵
假设我们有两个随机变量,分别表示一个人的身高和体重。我们想要描述这两个变量之间的关系,我们可以使用一个 2x2 的协方差矩阵来表示。
假设身高的标准差为 10 厘米,体重的标准差为 5 公斤,而身高和体重之间的相关系数为 0.7。
协方差矩阵 P 将如下所示:

身高方差=(身高标准差)平方=10*10=100 平方厘米
体重方差=(体重标准差)平方=5*5=25 平方公斤
身高与体重的协方差=相关系数×(身高标准差)×(体重标准差)=0.7×10×5=35 平方厘米\公斤
因此,协方差矩阵为:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









