









之前写的一篇【.NET MF 学习笔记系列(四)】MF控制小车(PWM驱动直流电机)的文章,目前已经能控制小车前进后退左转右转了,现在想要实现红外遥控控制,自行研究了下红外接收头,未果,最后还是采购了一些硬件根据老大的电路图自己焊接,红外接收模块电路如下
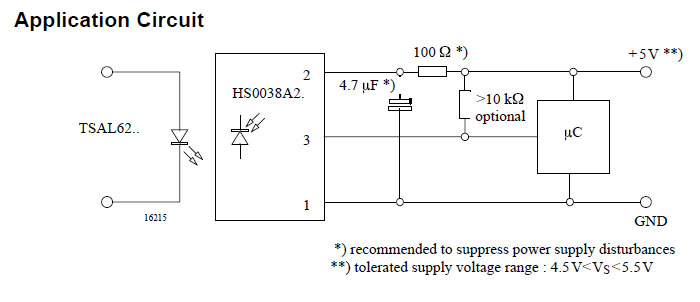
我所选取的具体器件型号如下:
1、100欧电阻
2、20K欧电阻 (两个10K电阻串联)
3、电解电容0.47uF
4、红外接收头(型号未知)
5、电压接入3.3v
最后的成果如下

接上开发板的样子如下
我所使用的遥控器

焊接好了接上电之后用万用表测试GND和输出端,遥控器对着红外接收头按键,意外的发现万用表上数字变化了,从此确认硬件没有故障,接上红牛开发板,下载好组长的示例(http://www.sky-walker.com.cn/yefan/MFV40/SourceCode/IRCarTest.rar),开始部署程序。
因为这次没有针对某个红外遥控器进行编码解码,只是对红外信号的高低电平进行匹配,就是说提前采集好某个按钮的电平高低特征,程序中根据接收到的信号去匹配,然后得出是哪个按钮。
比如前进按钮的特征数组如下,因为两次按下编码不同,所以这里有两个数组表示
//按键数据
static byte[] bytForward0 = new byte[] { 11, 34, 12, 11, 10, 34, 12, 11, 11, 11, 12, 10, 13, 10, 11, 12, 11, 11, 12, 33, 12, 10, 12, 33, 12, 33, 10, 34, 13, 32, 12, 33, 11, 12, 11, 33, 11, 12, 12, 33, 10, 12, 12, 10, 12, 11, 10, 12, 12, 33, 11, 12, 11, 33, 11, 12, 12, 32, 11, 34, 12, 33, 12, 33, 11 };
static byte[] bytForward1 = new byte[] { 12, 33, 11, 12, 10, 34, 11, 12, 11, 11, 11, 12, 10, 12, 11, 12, 10, 12, 10, 35, 10, 12, 11, 34, 10, 35, 11, 33, 11, 34, 11, 34, 12, 33, 11, 34, 10, 34, 12, 11, 10, 35, 11, 11, 11, 11, 11, 12, 11, 12, 10, 12, 10, 12, 12, 33, 11, 11, 12, 33, 11, 34, 10, 35, 11 };
现实总是比想象的要难,采集好前后左右暂停五个按键特征后开始正式遥控小车了,此时发现似乎遥控器不太灵光,一旦小车动起来后再按了就是没有反应,此时想到之前组长说的干扰问题,说PWM输出线跟红外信号线不能靠太近,稍微调整了之后的确好多了。但还是存在不灵光的现象,电脑接上开发板的串口查看输出信息发现老是有一些长度为1的信号,后来百度查找减少干扰的解决方案,无意中发现日光灯居然对红外信号也有很大影响,拿到黑暗的地方遥控就运作自如了。
因为红外信号的特征是一个byte类型的数据,看到组长示例代码中匹配特征的方法并不是直接相等的,而且两个byte相差小于4即认为是相等的,估计就是考虑到干扰的问题
//检测按键数据
private static bool CheckData(byte[] data, byte[] flag, int count)
{
if (data.Length != flag.Length || data.Length != count) return false;
for (int i = 0; i < count; i++)
{
if (System.Math.Abs(data[i] - flag[i]) > 3) return false;
}
return true;
}
以下是检测哪个按键的方法
//检测遥控器按键
public static Key GetKey(byte[] buff)
{
if (CheckData(buff, bytForward0, bytForward0.Length)) return Key.Forward;
if (CheckData(buff, bytForward1, bytForward1.Length)) return Key.Forward;
if (CheckData(buff, bytLeft0, bytLeft0.Length)) return Key.Left;
if (CheckData(buff, bytLeft1, bytLeft1.Length)) return Key.Left;
if (CheckData(buff, bytRight0, bytRight0.Length)) return Key.Right;
if (CheckData(buff, bytRight1, bytRight1.Length)) return Key.Right;
if (CheckData(buff, bytBack0, bytBack0.Length)) return Key.Back;
if (CheckData(buff, bytBack1, bytBack1.Length)) return Key.Back;
if (CheckData(buff, bytStop0, bytStop0.Length)) return Key.Stop;
if (CheckData(buff, bytStop1, bytStop1.Length)) return Key.Stop;
return Key.None;
}
更加专业的博客请参阅组长写的【STM32 .Net MF开发板学习-14】红外遥控器编码识别
未完待续。。。















 2414
2414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









