







 超级会员免费看
超级会员免费看
目录
应用卡尔曼滤波技术进行船舶GPS导航定位系统
1.船舶出港沿着某直线方向航行,采样间隔∆t。
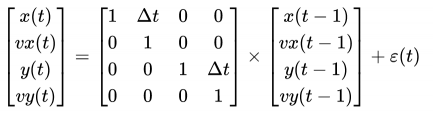
需要估计船在x和y方向上的位置和速度为x(t)、vx(t)、y(t)、vy(t)
这个实例的代表意义是,它只有一个观测,但解决的是一个4维的状态估计问题。
2.船舶动力系统的控制信号u(t)是人为输出的已知机动信号;过程噪声则来自于由海浪和海风引起的随机加速度。
这里不考虑船自身的动力因素,也就是假设 u(t)=0。
过程噪声ε(t)为高斯分布,其均值为0、方差为 R 。
根据运动学方程,该物体的状态转移方程为:
3. 给定GPS观测装置观测位置,民用GPS导航卫星播放的信号人为加入了高频震荡随机干扰信号。
将干扰信号看做观测噪声δ(t),假设其为零均值、方差为 Q 的白噪声。
观测方程写为:

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 242
242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











