







特征的匹配大致可以分为3个步骤:
- 特征的提取
- 计算特征向量
- 特征匹配
对于3个步骤,在OpenCV2中都进行了封装。所有的特征提取方法都实现FeatureDetector接口,DescriptorExtractor接口则封装了对特征向量(特征描述符)的提取,而所有特征向量的匹配都继承了DescriptorMatcher接口。
在图像配准中,特征点的描述往往不是位置这么简单,而是使用了一个N维向量来描述一个特征点,这些描述子之间可以通过定义距离公式来比较相近程度。surf特征是类似于SIFT特征的一种尺度不变的特征点,它的优点在于比SIFT效率要高,在实际运算中可以达到实时性的要求,
SIFT算法的过程实质是在不同尺度空间上查找特征点(关键点),用128维方向向量的方式对特征点进行描述,最后通过对比描述向量实现目标匹配。
在sift中,是在特征点周围取16*16的邻域,并把该领域化为4*4个的小区域,每个小区域统计8个方向梯度,最后得到4*4*8=128维的向量,该向量作为该点的sift描述子。
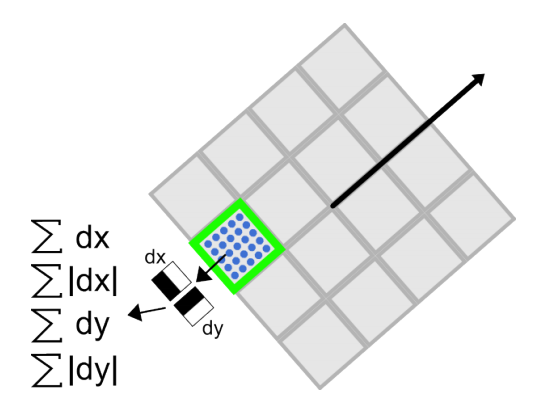
在surf中,也是在特征点周围取一个正方形框,框的边长为20s(s是所检测到该特征点所在的尺度)。该框带方向,方向当然就是第4步检测出来的主方向了。然后把该框分为16个子区域,每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之和,水平方向绝对值之和,垂直方向之和,垂直方向绝对值之和。该过程的示意图如下所示:
造特征点
这样每个小区域就有4个值,所以每个特征点就是16*4=64维的向量,相比sift而言,少了一半,这在特征匹配过程中会大大加快匹配速度。
以特征点为中心,取领域内16*16大小的区域,并把这个区域分成4*4个大小为4*4的小区域,每个小区域内计算加权梯度直方图,该权值分为2部分,其一是该点的梯度大小,其二是改点离特征点的距离(二维高斯的关系),每个小区域直方图分为8个bin,所以一个特征点的维数=4*4*8=128维。示意图如下(该图取的领域为8*8个点,因此描述子向量的维数为32维):

















 7429
7429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









