







1、 构造高斯差分空间图像。
Sift特征点的检测时在DOG图像上进行的,DOG图像是将相邻尺度空间图像相减得到的。且金字塔的每一层都要构造一个DOG空间图像。默认参数是金字塔4层,即4个octave,每一个octave中有5张不同尺度的图片,不同octave的图片尺寸大小不同,所以每一层中就会得到4幅DOG图像。
高斯金字塔的第1层第1副原图像是将原图像放大2倍且sigma(sigma=1.6)模糊,第2幅图像是k*sigma(k等于根号2)模糊,第3幅是k*k*sigma模糊,后面类推…
高斯金字塔第2层第1幅图是选择金字塔上一层(这里是第1层)中尺度空间参数为k*k*sigma的那幅图(实际上是2倍的尺度空间)进行降采样(尺寸大小为原来的1/4倍)得到,如果k不等于根号2,那么取原图的2*sigma降采样得到。第2层第2幅图是在本层第一幅图尺度模糊系数增加k倍模糊后的图像,后面类似…
示意图如下所示:
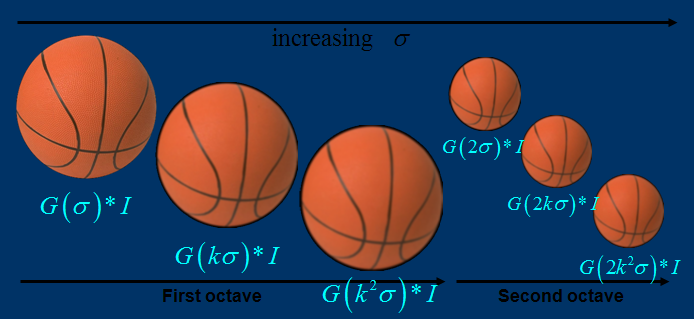
尺度不变当然是与图片尺寸有关,即图片的尺寸大小变化,但是其检测结果不变。
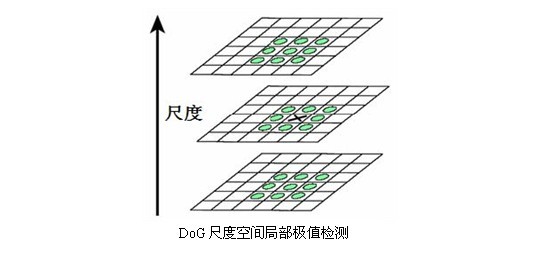
2、寻找极大极小值点。
将每个像素点与其所在的那幅图像邻域的8个像素,它所在的向量尺度空间上下2幅图对应位置邻域各9个点,总共26个点进行像素值比较,如果该点是最大或者最小点,则改点就暂时列为特征点。
其邻图如下:
3、精确定位极值点
子像素级极值点:
由于上面找到的近似极值点落在像素点的位置上,实际上我们在像素点附近如果用空间曲面去拟合的话,很多情况下极值点都不是恰好在像素点上,而是在附近。所以sift算法提出的作者用泰勒展开找到了亚像素级的特征点。这种点更稳定,更具有代表性。
消除对比度低的特征点:
对求出亮度比较低的那些点直接过滤点,程序中的阈值为0.03.
消除边界上的点:
处理方法类似harrs角点,把平坦区域和直线边界上的点去掉,即对于是边界上的点但又不是直角上的点,sift算法是不把这些点作为特征点的。
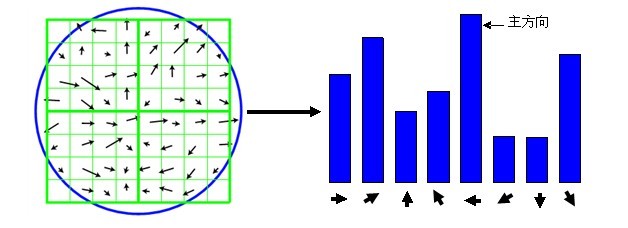
4、选取特征点主方向
在特征点附近选取一个区域,该区域大小与图图像的尺度有关,尺度越大,区域越大。并对该区域统计36个bin的方向直方图,将直方图中最大bin的那个方向作为该点的主方向,另外大于最大bin80%的方向也可以同时作为主方向。这样的话,由于1个特征点有可能有多个主方向,所以一个特征点有可能有多个128维的描述子。如下图所示
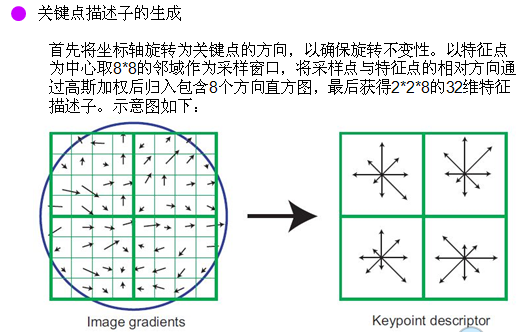
5、 构造特征点描述算子。
以特征点为中心,取领域内16*16大小的区域,并把这个区域分成4*4个大小为4*4的小区域,每个小区域内计算加权梯度直方图,该权值分为2部分,其一是该点的梯度大小,其二是改点离特征点的距离(二维高斯的关系),每个小区域直方图分为8个bin,所以一个特征点的维数=4*4*8=128维。示意图如下(该图取的领域为8*8个点,因此描述子向量的维数为32维):


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









