






无论matlab或MuJoCo软件,机器人模型要真实模拟运动起来,建模后关节的坐标系、基准轴等需要设置准确。本节简单介绍如何构造ieo机器人模型的参考坐标系、基准轴、点和导出urdf文件。
背景前提是ieo工程师已在solidwork设计好机器人的3D模型文件。
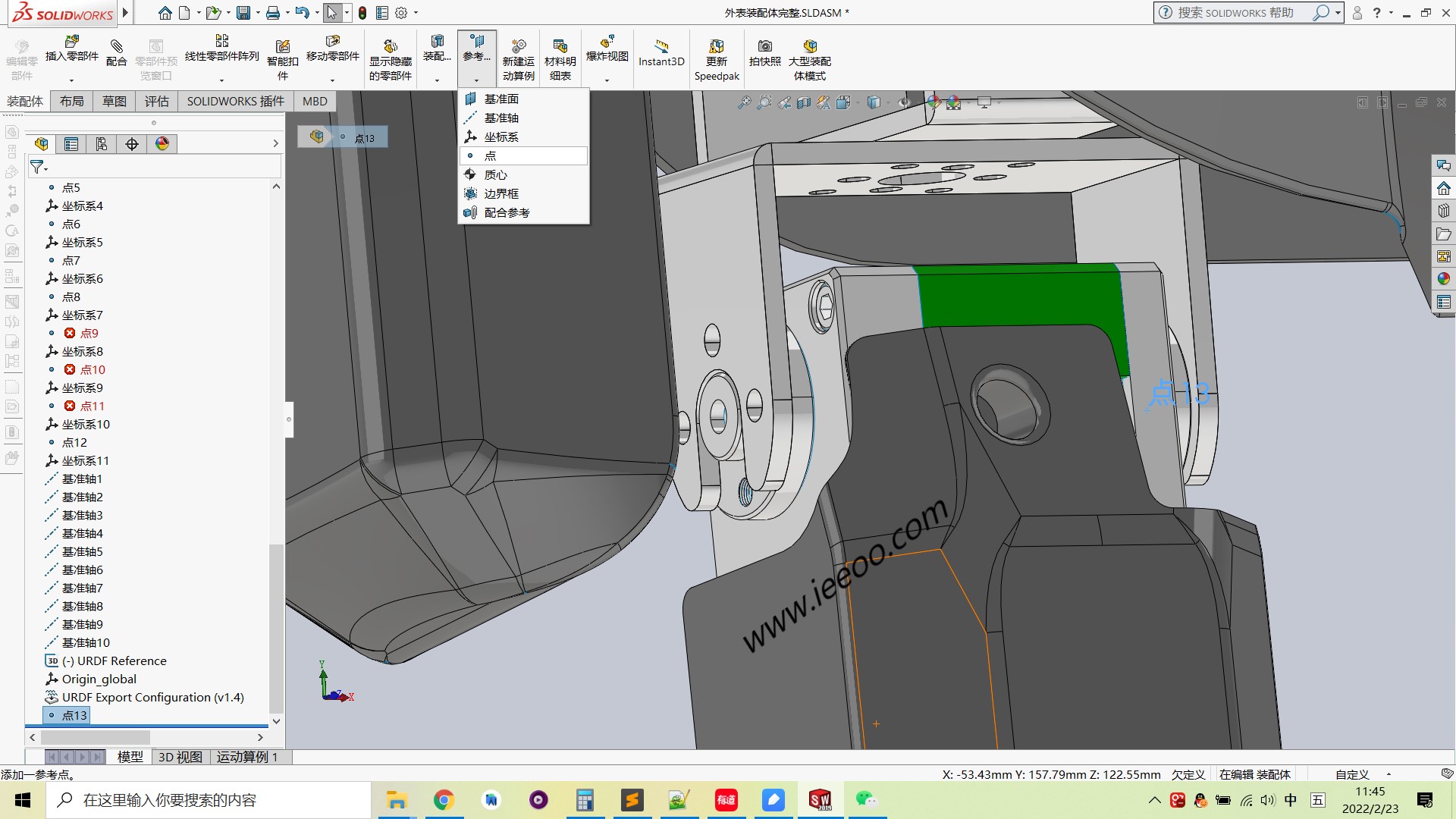
- 参考点

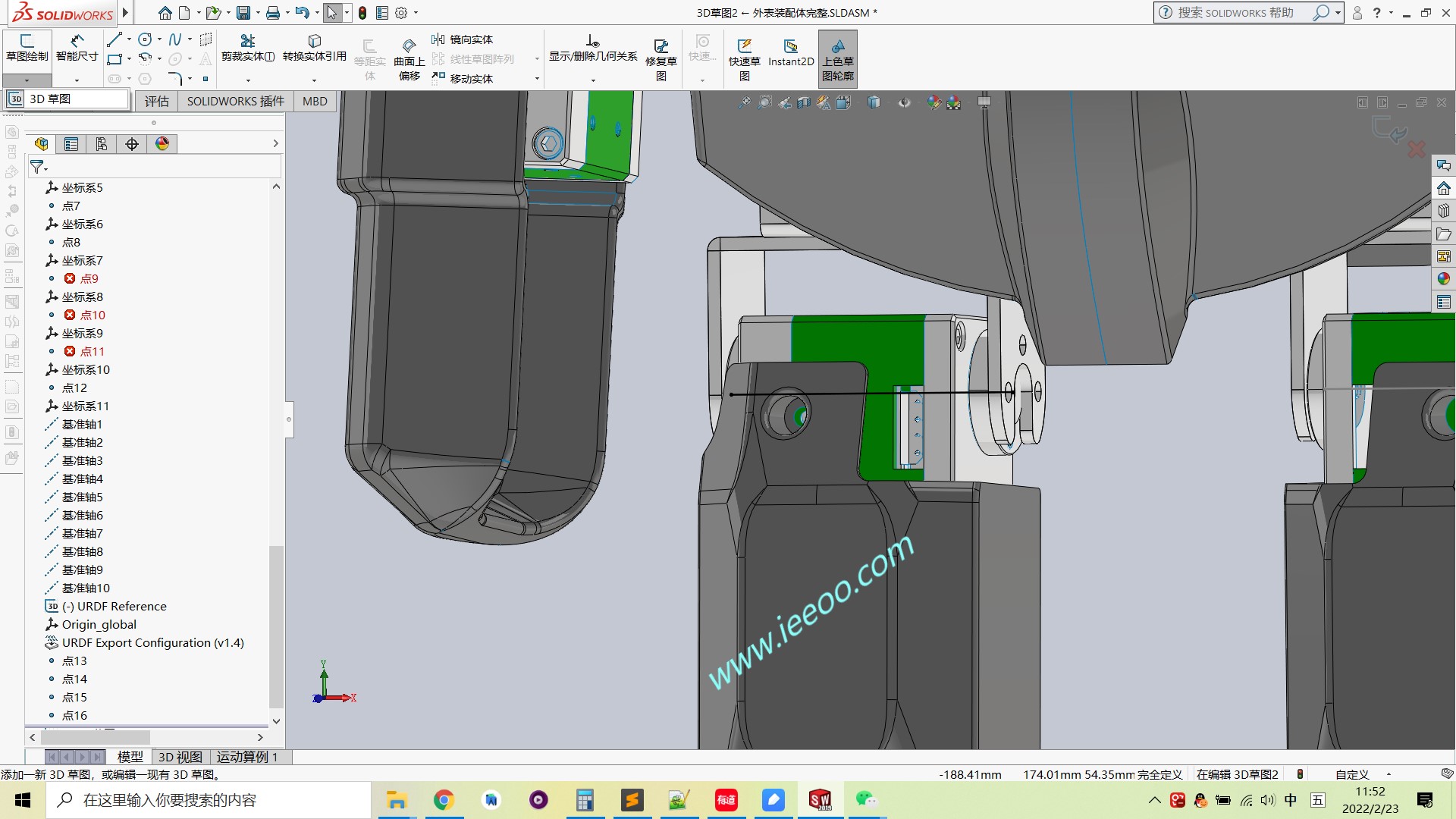
- 【3D草图】
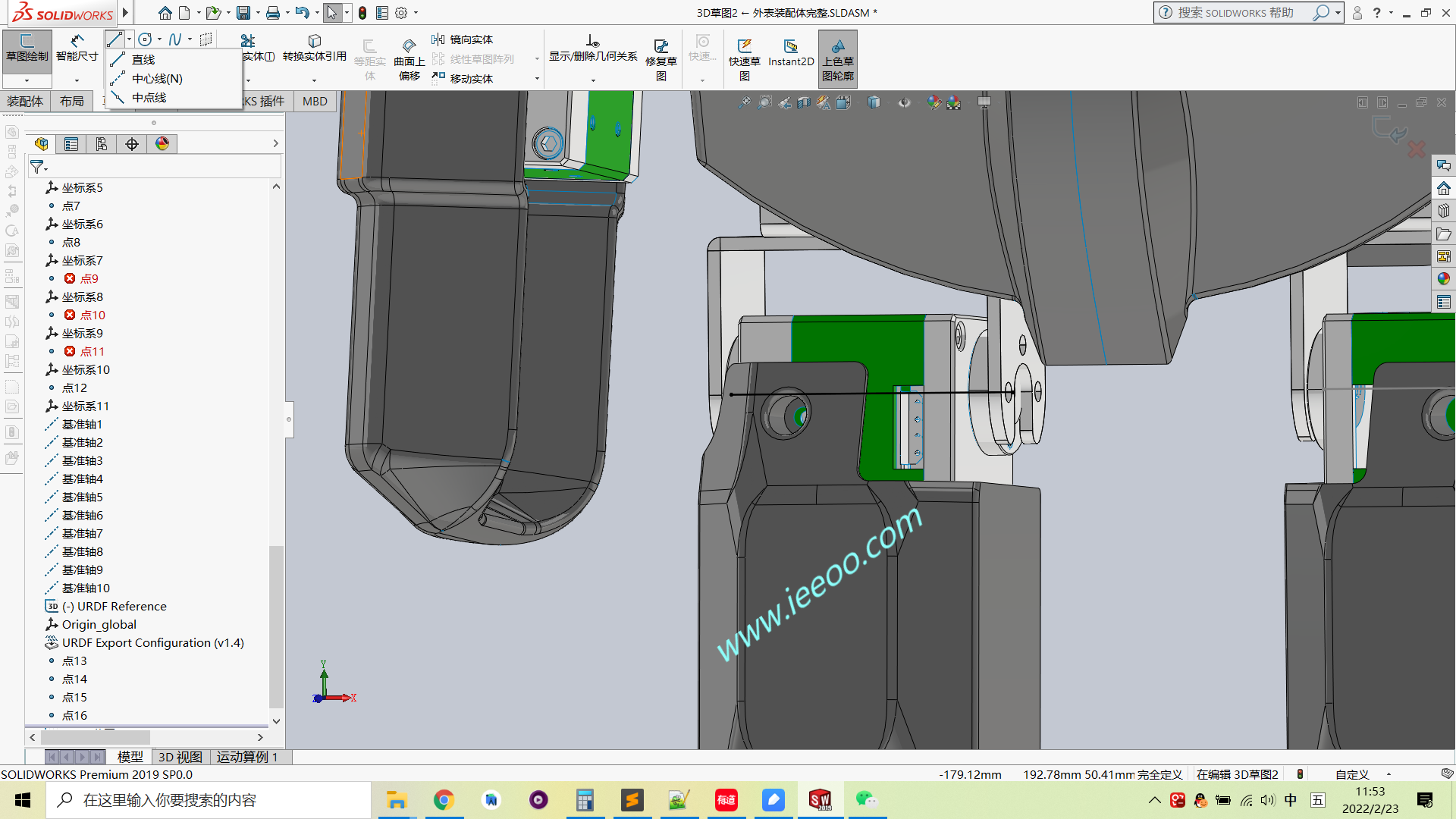
- 选择画【直线】
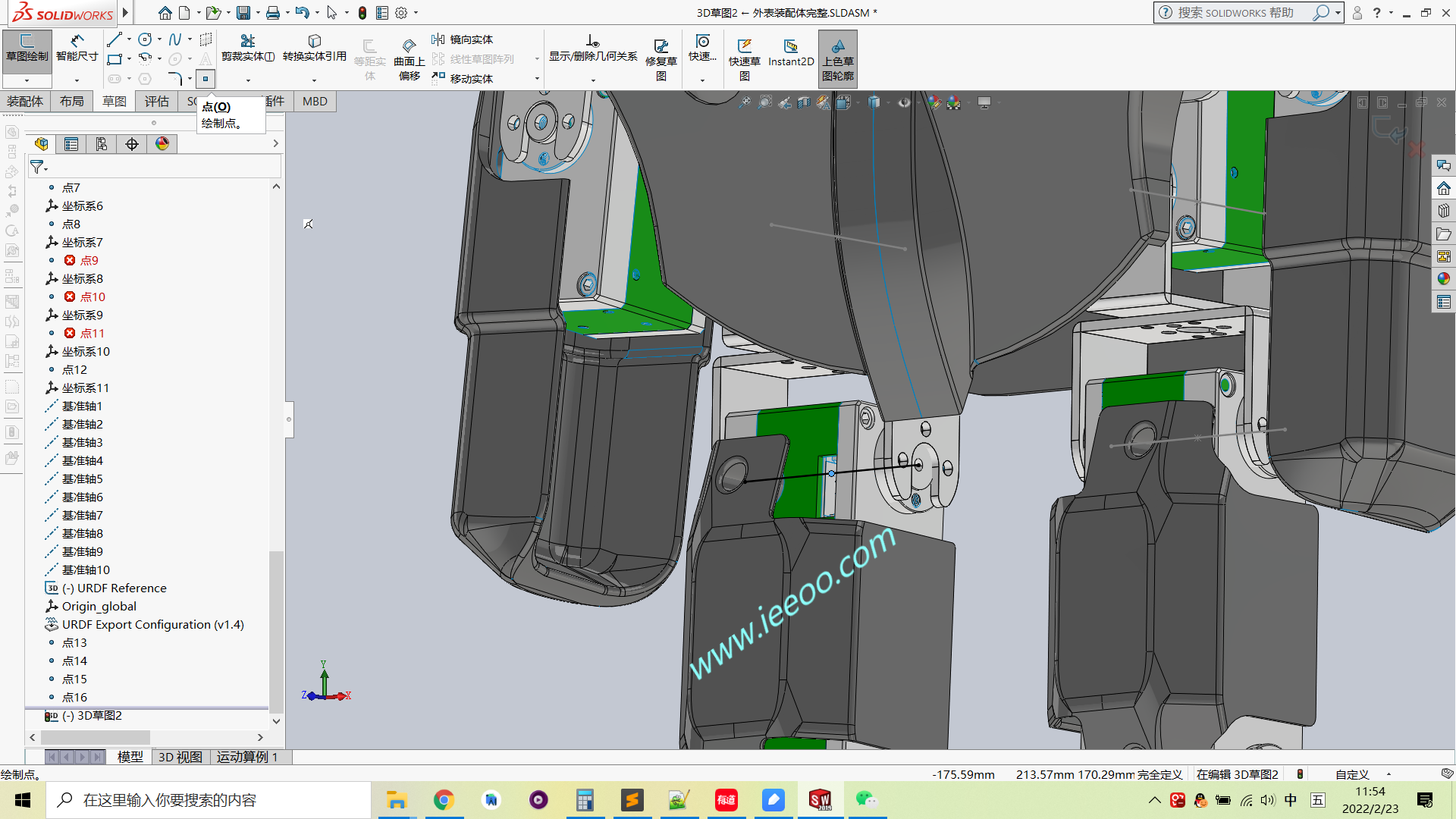
- 选择绘【点】
- 基准轴
- 开始导出机器人的urdf格式文件:
【工具】》【Tools】》 Export as URDF
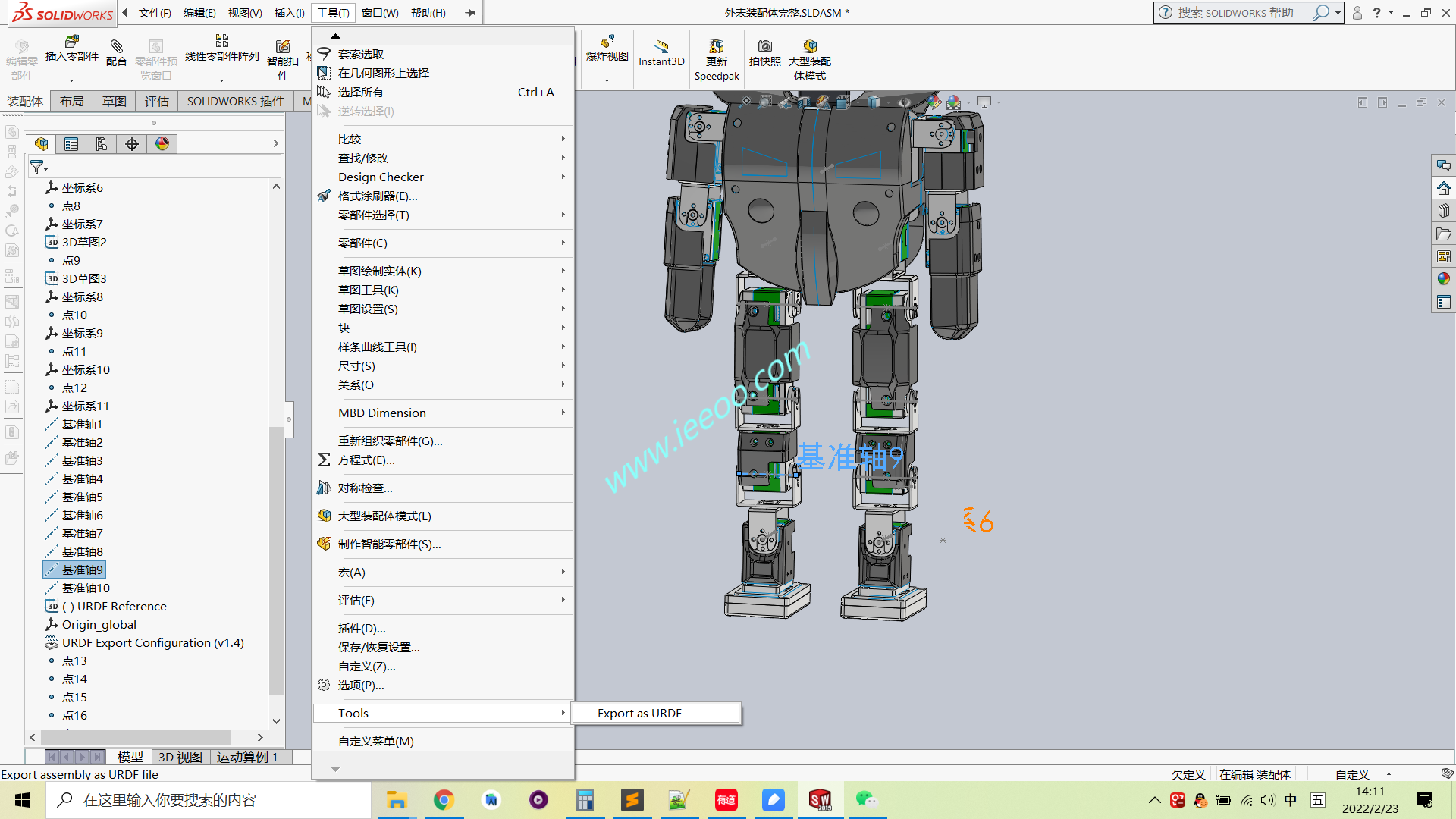
每次都需要重新选择各关节的坐标系 和基准轴。
然后导出,确认。
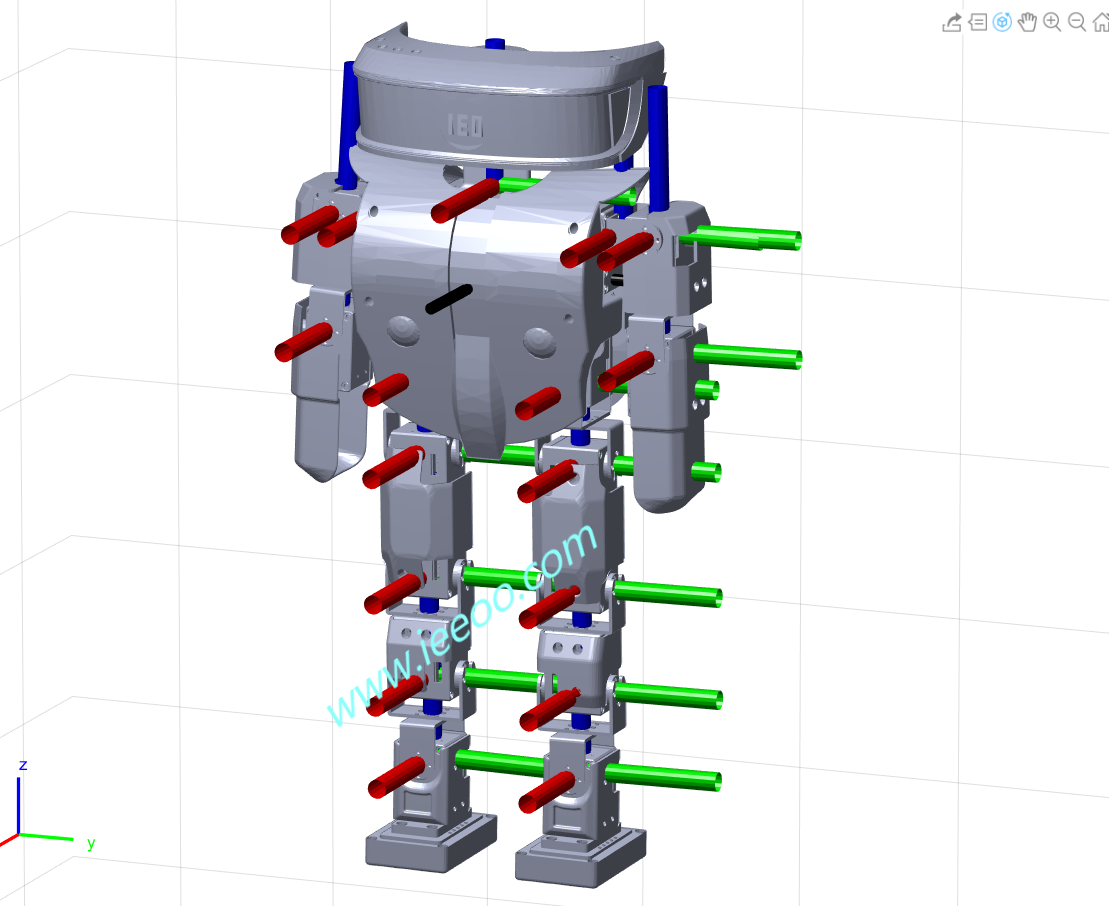
在matlab中执行代码:
cd F:\******\结构设计\robot_stl_20220307\stl\ieoRobot
ieorobot = importrobot('urdf/ieoRobot.urdf');
show(ieorobot)
即可见效果:
更多关于机器人建模和运动控制的资讯,业务合作请联系艾易欧ieo科技0755-32986162。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









