






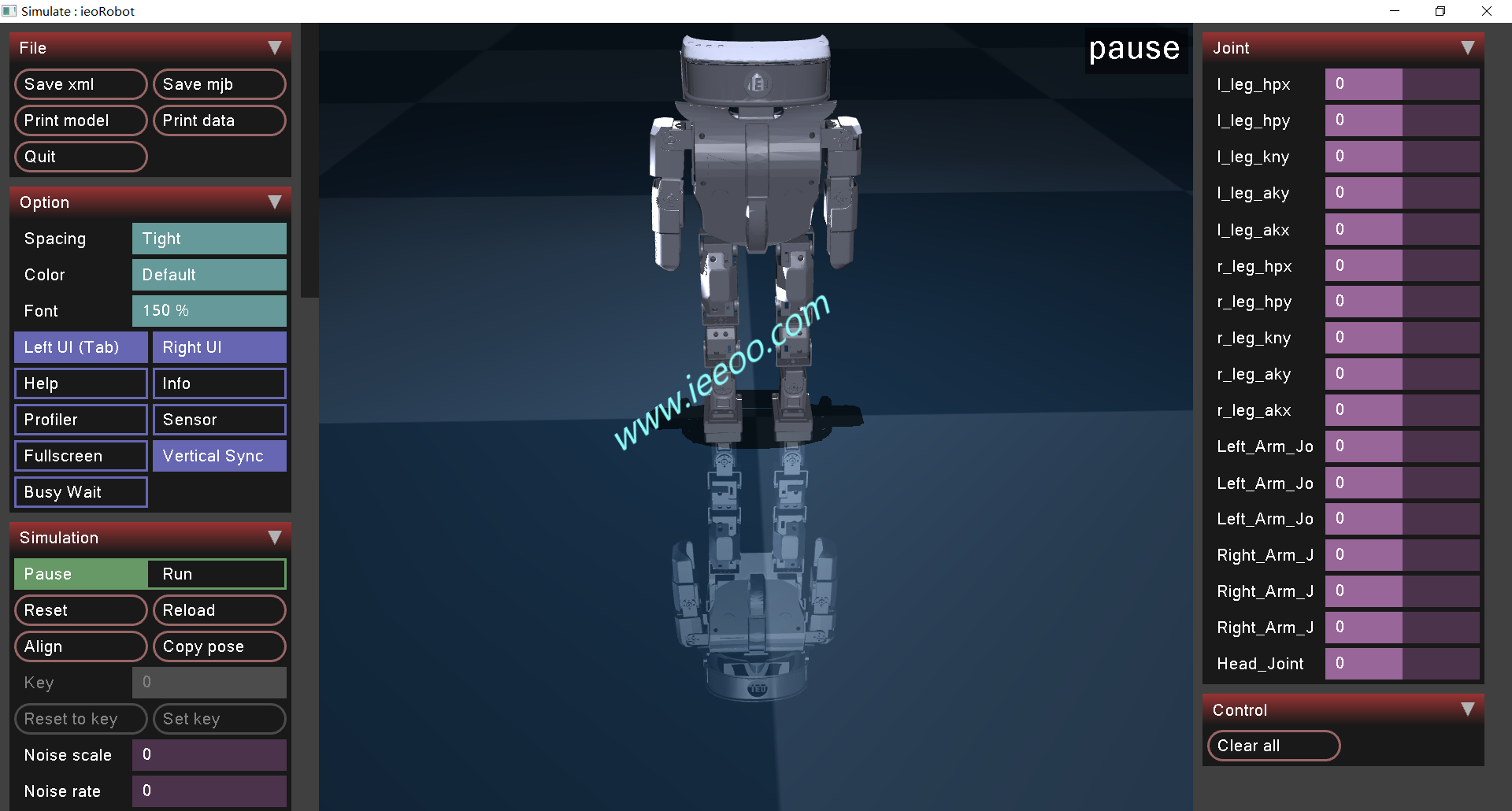
打开运行mojoco软件模拟器simulate.exe

导入机器人配置文件....\ieoRobot\urdf\ieoR.xml(ieoR.xml是已编写好的机器人Mujoco格式文件,里面配置了IEO双足机器人3D模型文件的对应路径)
效果如下:(因为有重力效应,且机器人无驱动力,会产生自由跌落的“躺平”效果)

通过Pause暂停模拟,Reset后可恢复站立效果。
通过鼠标左键的拖拉动作可旋转各个角度观看,鼠标右键前后左右画面拖动,鼠标滚轮实现缩放。

通过右侧的Joint关节参数,可调整机器人的关节角度旋转变化。
效果如下:
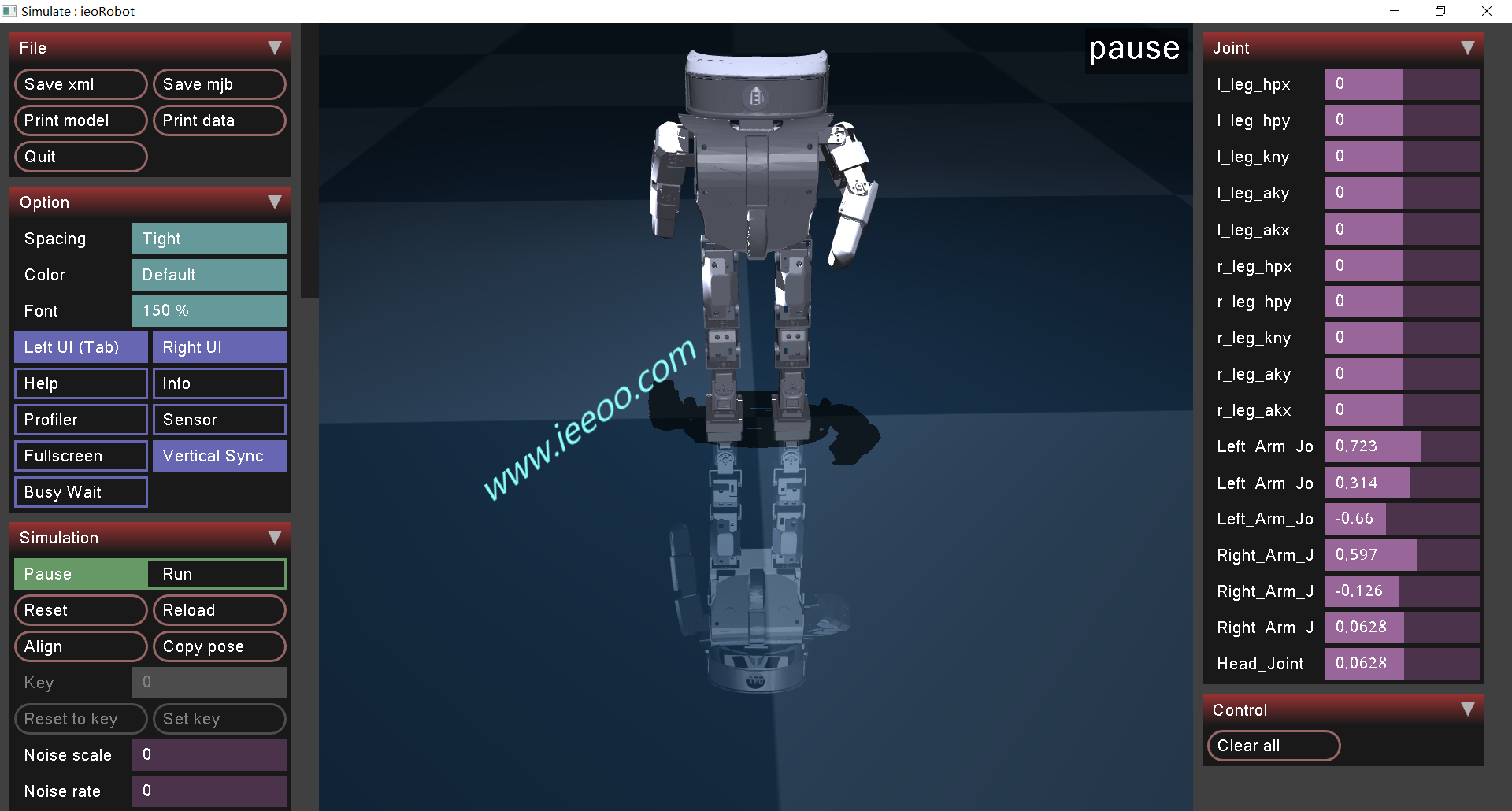
来张特画:

3D模型导入后,如何控制IEO机器人模型运动呢?先预览一下运动控制的效果,链接http://www.ieeoo.com/products?p=ieorobot
工作太忙,一下写不完。
关于机器人的Mujoco配置文件编写的介绍请见下一回合。
关于机器人3D模型如何设置旋转关节也请见下一回合。
关于3D机器人数学建模更请期待后续章节。















 2982
2982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









