







 本文详细介绍了基于STM32F103VBT6微控制器的红外遥控接收与处理流程,包括硬件配置、HAL库使用、中断处理、代码实现以及超时处理策略。着重阐述了如何通过TIM3定时器捕获红外脉冲信号,并采用NEC协议进行解析,最终将接收到的数据存储至队列中。
本文详细介绍了基于STM32F103VBT6微控制器的红外遥控接收与处理流程,包括硬件配置、HAL库使用、中断处理、代码实现以及超时处理策略。着重阐述了如何通过TIM3定时器捕获红外脉冲信号,并采用NEC协议进行解析,最终将接收到的数据存储至队列中。
软件:
IAR 7.4
STM32CubeMX 4.14.0
硬件:
STM32F103VBT6
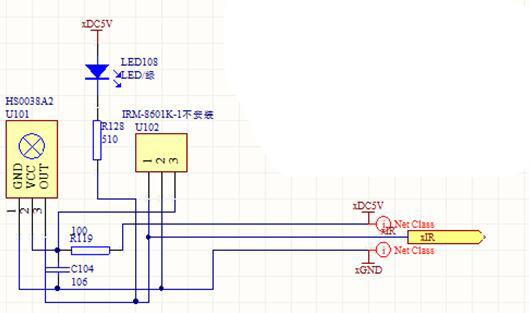
原理图,和手册建议的基本一致,只是上拉电阻不是手册建议的10K以上,这里的面板距离控制器比较远,可能是考虑到线阻。
HAL配置,使用Cubemx。
HS0038A2的输出,带有上拉电阻,接着一个led灯,因此TIM3的IC脚浮空。
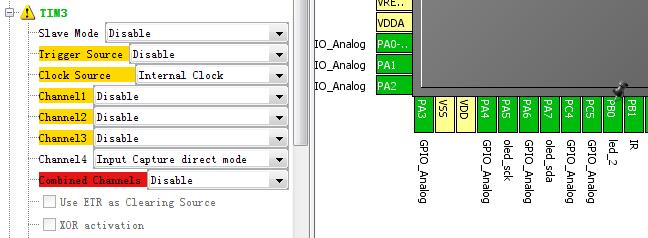
设计者恰好把IR设计在TIM3的通道4上。如果使用了通道1/2, 就可以使用PWM输入方式来捕捉红外脉冲,可以拿到每个脉冲的数据。

IC模式使用下降沿。
红外控制这里是常用的NEC协议。遥控器输出高电平,而HS0038A2转换低电平输出。 如,一个9ms高+4.5ms的低,组成一个header,OUT数据线上信号是 9ms低+4ms高,空闲时数据线是高(避免干扰)。
因此,我们只检测下降沿中断,就可以识别红外的一个脉冲信号(1帧信号发出,9ms一开始就拉底,而后4.5ms拉高再拉低)。逻辑1为2.25ms,逻辑0为1.12ms.
Tim3还给其他外设提供即时,所以这里使用了1us的分辨率。
需要启用Tim3的中断,因为使用了Freertos,所以其中断设置到最低15级。也不怕其他外设中断红外读取。
代码.h
/*
* HS0038A2
* ir.h
*
*/
#ifndef _IR_H
#define _IR_H
#include "tim.h"
#include "cmsis_os.h"
#define DELTA 200
#define HEADER_MIN 13500 - DELTA
#define HEADER_MAX 13500 + DELTA
#define DATA1_MIN 2250 - DELTA
#define DATA1_MAX 2250 + DELTA
#define DATA0_MIN 1120 - DELTA
#define DATA0_MAX 1120 + DELTA
#define IR_ADDR 2
typedef enum {
NECSTATE_IDLE = 0,
NECSTATE_START = 1,
NECSTATE_RECEIVE = 2,
} NEC_State;
#endif代码.c:
/*
* ir.c
*/
#include "ir.h"
extern osMessageQId Q_IrHandle;
static uint32_t ccr_prev = 0;
static uint32_t ccr_cur = 0;
static uint32_t timeout = 0;
static uint8_t pulse_cnt = 0;
static uint32_t ir_code;
NEC_State state = NECSTATE_IDLE;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance==TIM3 && htim->Channel==HAL_TIM_ACTIVE_CHANNEL_4) {
ccr_cur = __HAL_TIM_GET_COMPARE(&htim3, TIM_CHANNEL_4);
uint32_t delta_t;
if (ccr_cur>ccr_prev) {
delta_t = ccr_cur - ccr_prev;
}
else {
delta_t = 0xffff - ccr_prev + ccr_cur; // 0xffff溢出
}
// 接收到信息头,就接收4个8字节
。
。
。
// 校验
if ((uint8_t)(~code[0])!=code[1] || (uint8_t)(~code[2])!=code[3])
return;
if (code[0] != IR_ADDR)
return;
// 放到队列
if (Q_IrHandle != NULL) {
osMessagePut(Q_IrHandle, code[2], 0);
}
}
// 超时 110ms
if (timeout >= 110*1000) {
state = NECSTATE_IDLE;
pulse_cnt = 0;
ir_code = 0;
timeout = 0;
}
ccr_prev = ccr_cur;
}
//
}检测到信息头后,连续读32bit到一个uint32_t数据中。
这里没有依靠最后1给560us来做结束判断,只是一个 pulse_cnt>=32 来做判断,开始写到 pulse_cnt>=31,结果反码总是差0x80。
最后分离出4个字节,做地址检测,以及校验。 校验是使用 ~ 取反码,IAR下需要强制转换到uint8_t,否则判断条件为假。
也没有做连续按键处理。
超时处理,一个是判断脉冲持续时间在3ms内,另一个是判断脉冲总时间在110ms内。
因为板子用可控硅控制罩极电机,启动电机后,能看到OUT输出干扰信号,但是被headr判断给挡掉了。


















 1110
1110

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











