






 本文详细介绍了西门子S7-1200控制四轴伺服程序,涵盖伺服、步进控制、定位方法、速度与扭矩模式。适合学习者,强调了程序的可重复使用和模块化设计。
本文详细介绍了西门子S7-1200控制四轴伺服程序,涵盖伺服、步进控制、定位方法、速度与扭矩模式。适合学习者,强调了程序的可重复使用和模块化设计。
西门子S7-1200控制四轴伺服程序案例:
1.内容涵盖伺服,步进点动,回原,相对定位,绝对定位,速度模式控制!特别适合学习伺服和步进的朋友们!PTO伺服轴脉冲定位控制+速度模式控制+扭矩模式;
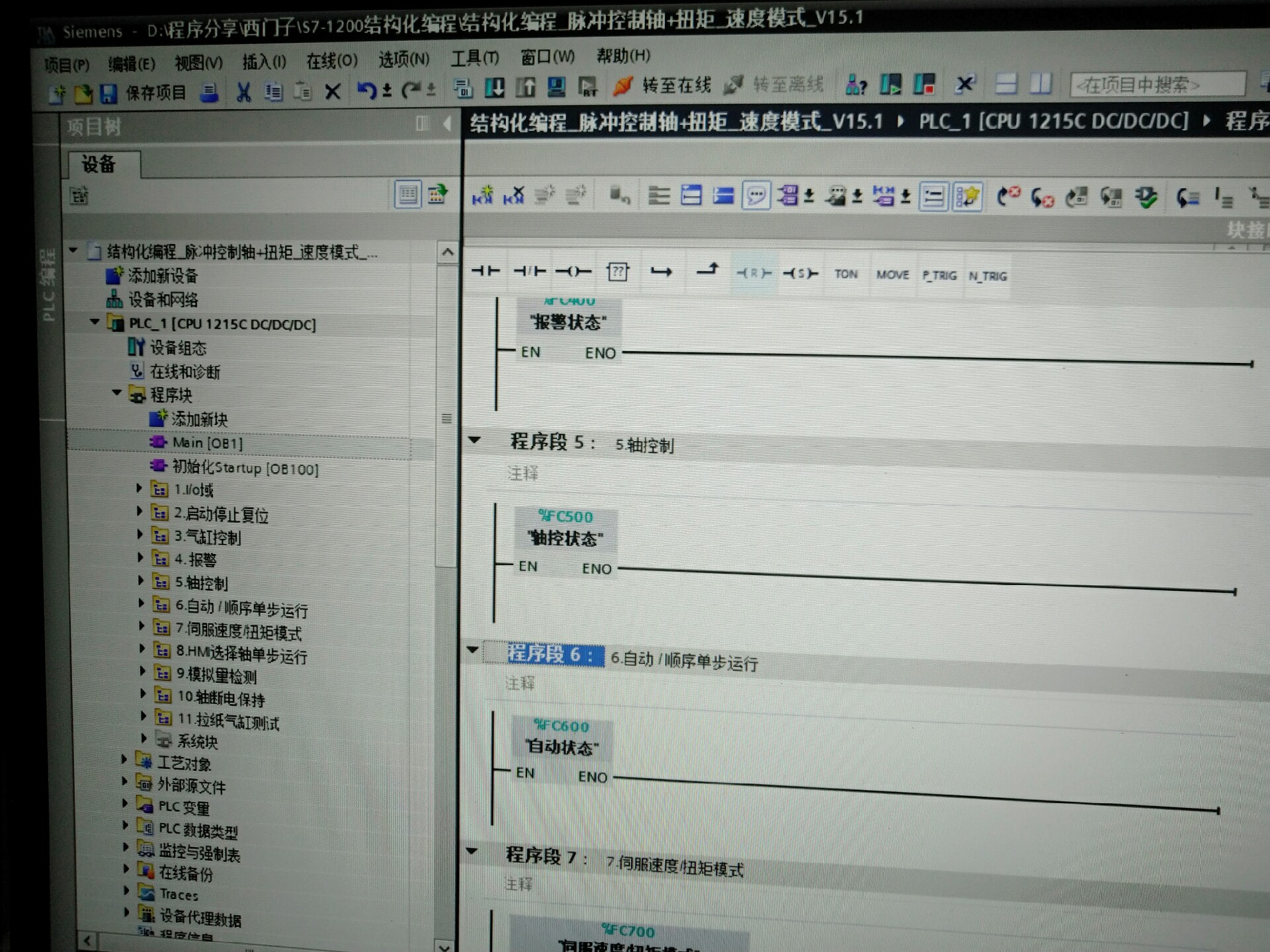
2.每个功能块可以无数次重复调用,可以建成库,用时调出即可;
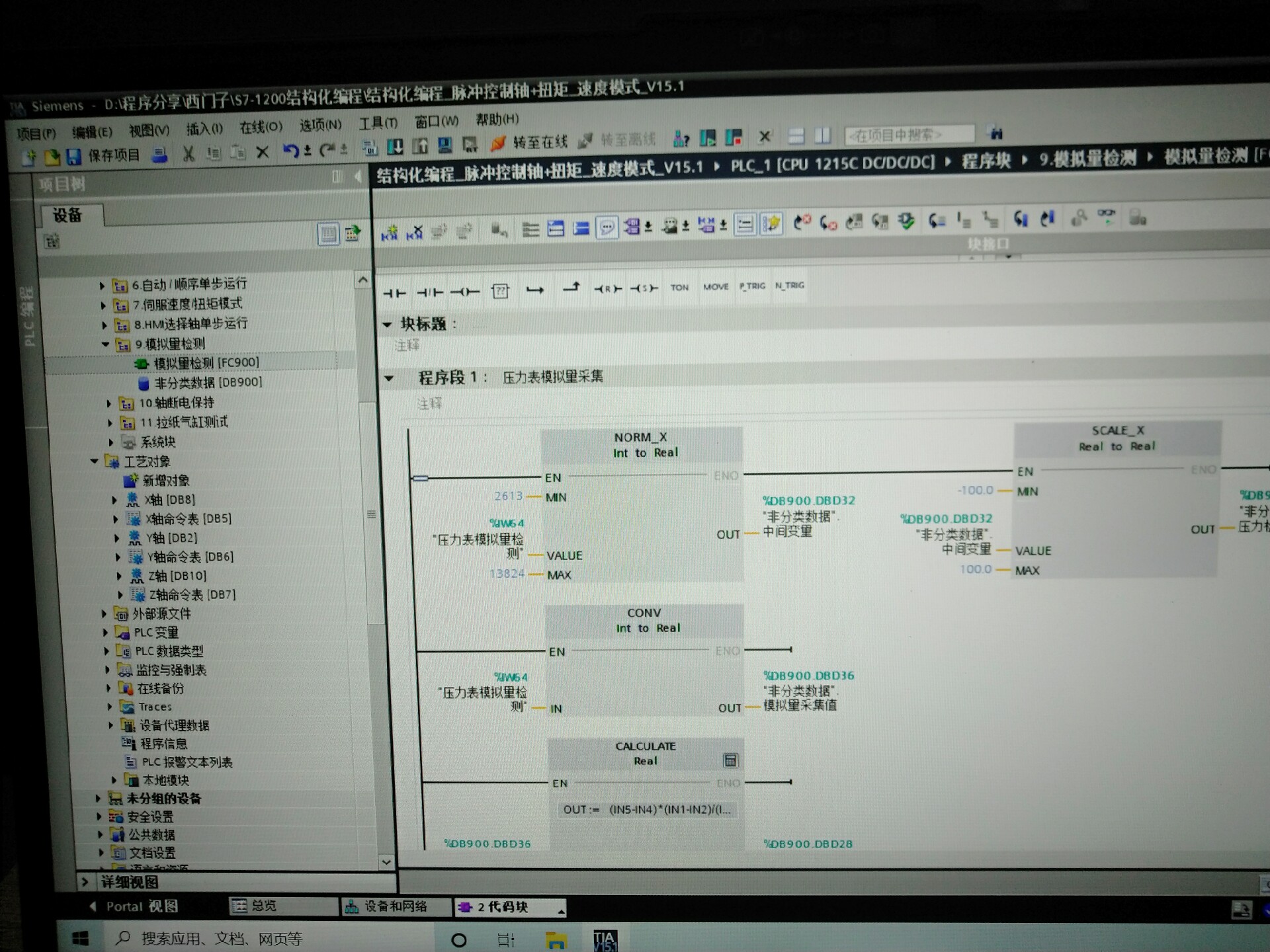
3,程序结构分明,注释详细,威纶通触摸屏程序;
ID:829643613432944
长安街的豌豆

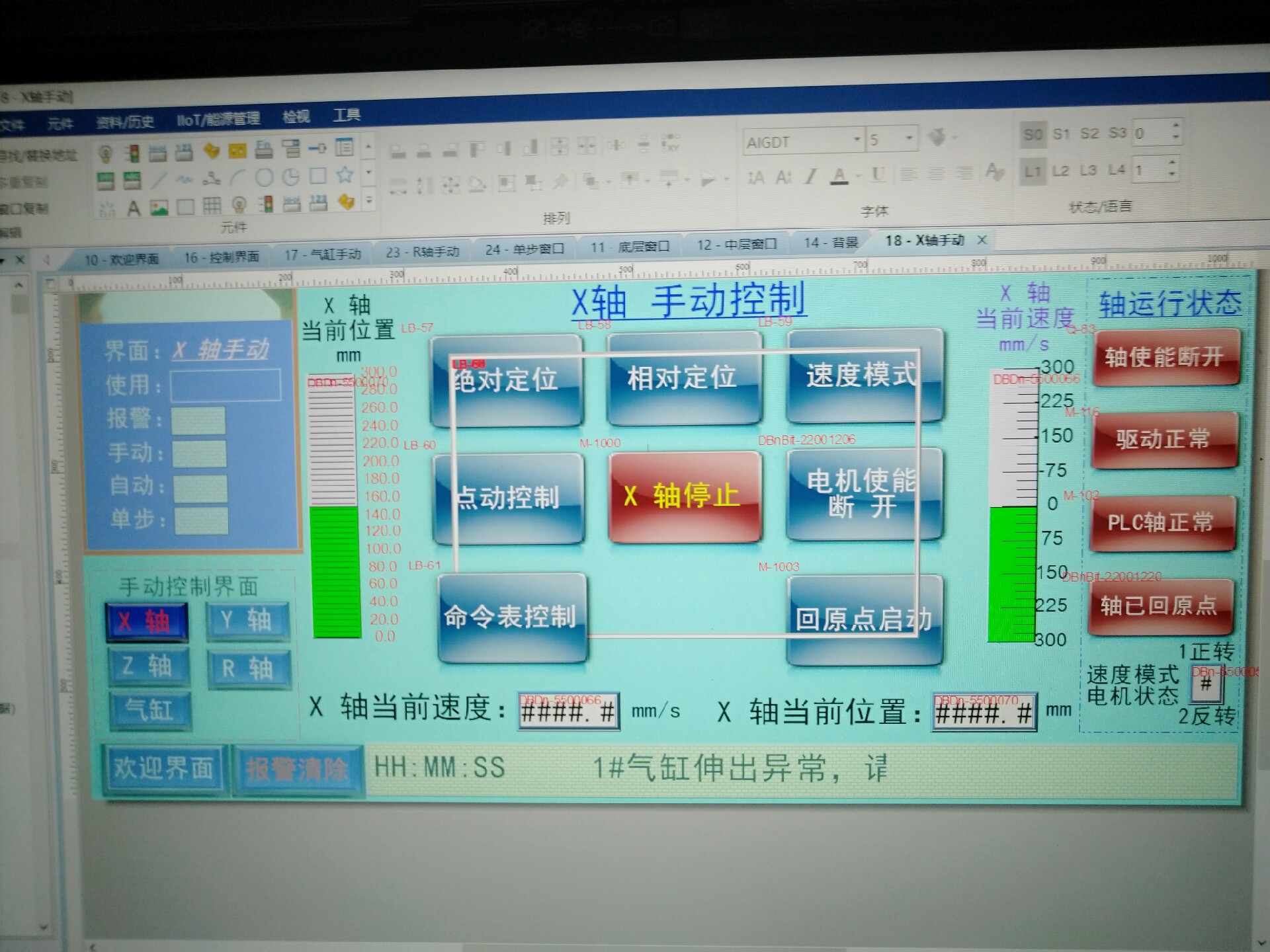
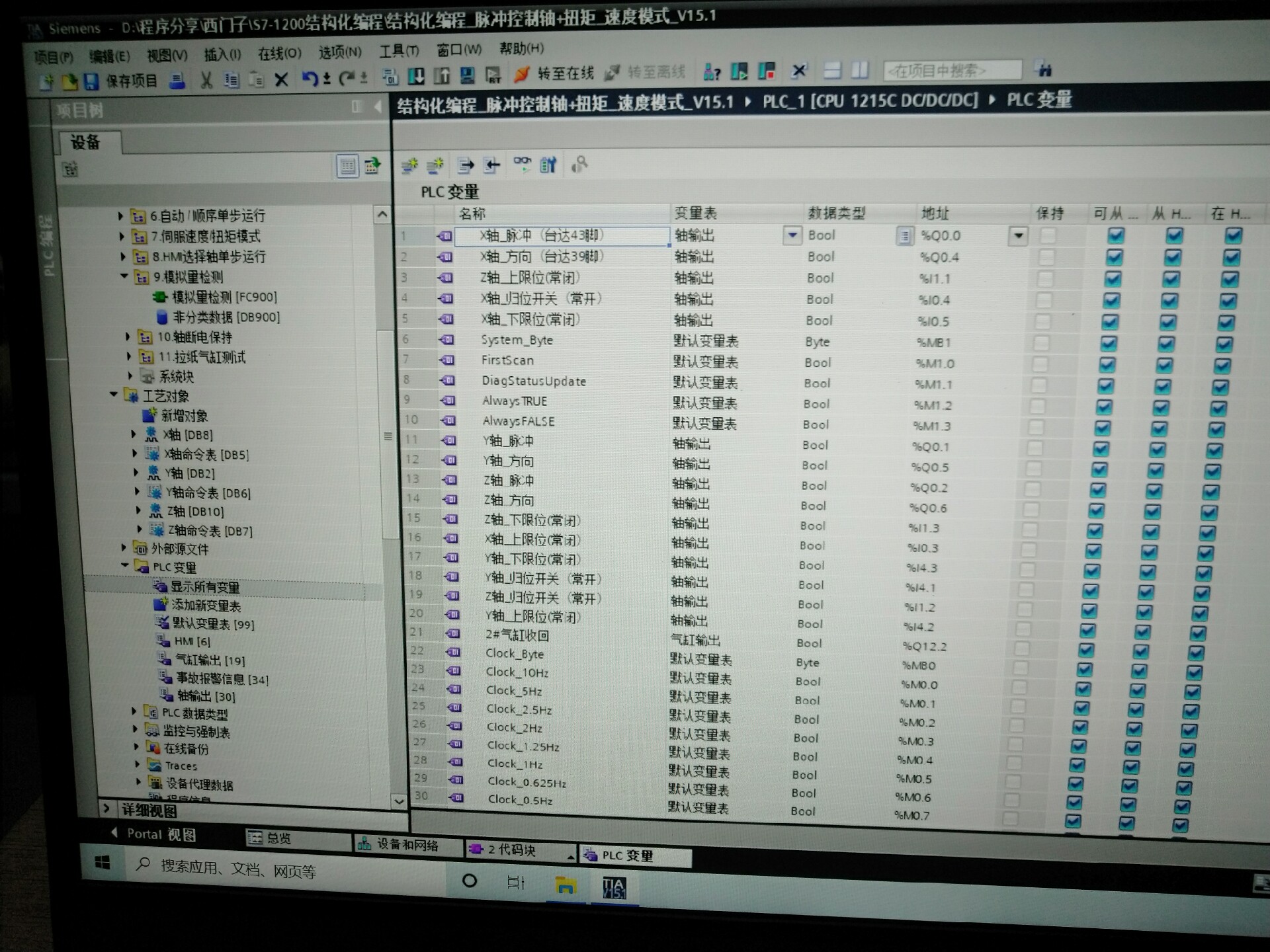
西门子S7-1200控制四轴伺服程序案例:内容涵盖伺服、步进点动、回原、相对定位、绝对定位、速度模式控制。特别适合学习伺服和步进的朋友们。这个案例采用了PTO伺服轴脉冲定位控制+速度模式控制+扭矩模式的技术。每个功能块可以无数次重复调用,还可以建成库,需要时可以随时调用。
文章首先介绍了西门子S7-1200控制四轴伺服程序的背景和意义。伺服和步进技术在现代工业控制领域中广泛应用,为了满足不同工业应用的需求,我们需要掌握相关的控制方法和技术。接下来,文章展开了该程序案例的具体内容。
首先,文章介绍了伺服的基本原理和工作方式。伺服系统是通过控制信号将电机导轨的位置和速度保持在设定值附近。这个程序案例中,我们通过PTO伺服轴脉冲定位控制实现了精确的定位控制。同时,结合速度模式控制和扭矩模式,可以实现更加灵活的控制。
接着,文章详细介绍了步进点动、回原、相对定位和绝对定位的技术。步进点动是一种常用的控制方法,可以实现对电机的精确控制。回原是指将电机位置回到初始位置,确保系统能够精准地开始工作。相对定位是通过指定相对位置来移动电机,而绝对定位是通过指定绝对位置来移动电机。
文章还介绍了该程序案例中的速度模式控制和扭矩模式控制。速度模式控制可以根据需求调整电机的运行速度,实现不同的工作要求。而扭矩模式控制可以根据负载情况调整电机的输出扭矩,确保系统的稳定性和可靠性。
最后,文章介绍了该程序的结构和注释。程序结构清晰,模块化设计,每个功能块都可以无数次重复调用,可以建成库,在需要时快速调用。注释详细,方便阅读和理解程序代码。此外,文章还提到了采用威纶通触摸屏程序,使得操作更加简便和直观。
综上所述,西门子S7-1200控制四轴伺服程序案例是一个涵盖了伺服、步进以及多种控制方法的技术实践。它不仅适合学习伺服和步进的朋友们,还可以作为工业控制领域实际应用的参考。通过学习和应用该程序,我们可以更好地理解和掌握控制技术,为实际工程项目的开发和应用提供有力支持。
以上相关代码,程序地址:http://matup.cn/643613432944.html

















 1386
1386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









