








本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48661397 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于poppy-project
poppy是一个机器人的开源项目,一个人型机器人的项目,设计cad啥的都是开源的。
项目使用GPL v3开源的。
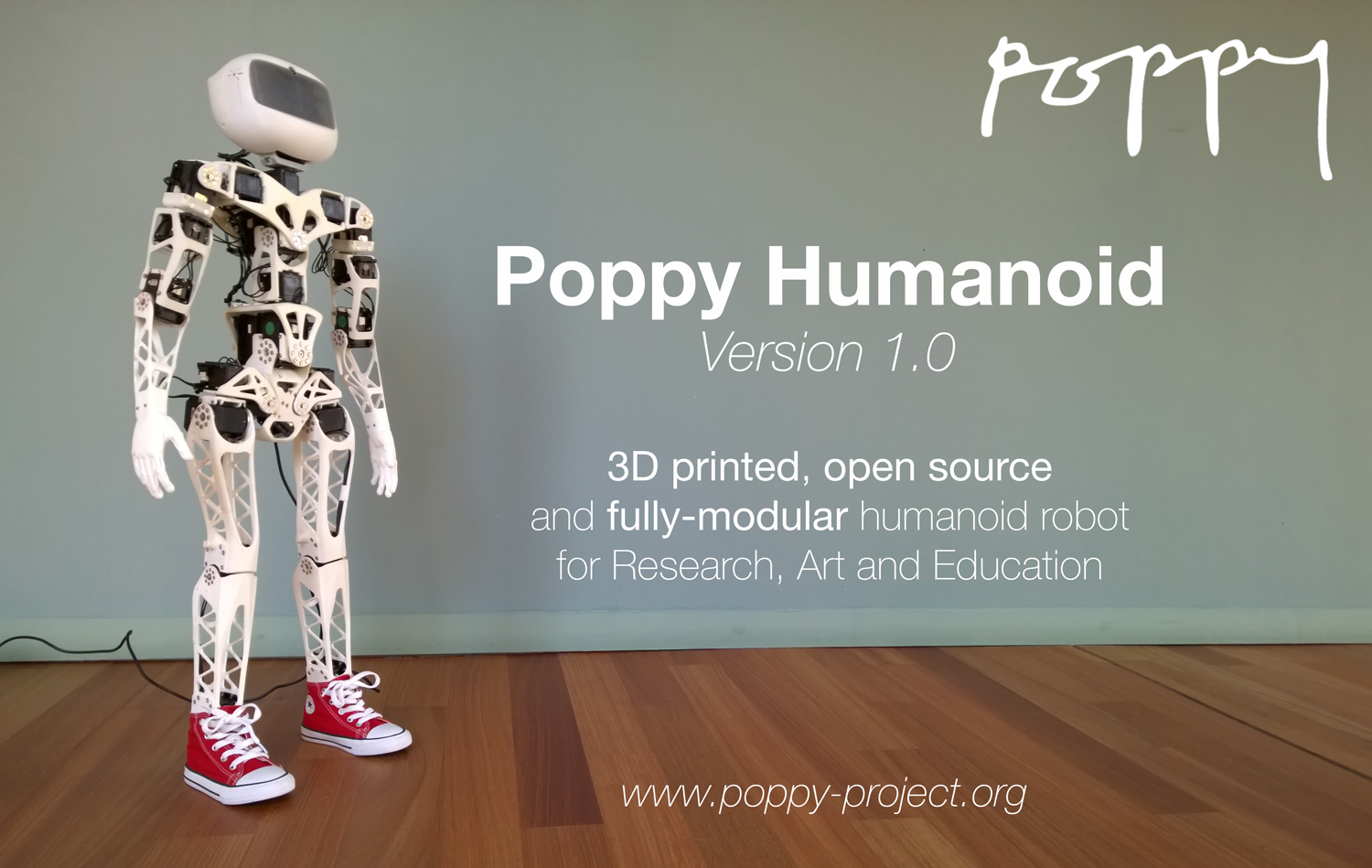
总成本在 5万RMB,60%的成本在Dynamixel 舵机上面,需要25个舵机。
不知道国产舵机能补能替代。
2,关于cad图
官方网站是:http://www.poppy-project.org/
github:https://github.com/poppy-project
使用3d可以打印关键的关节啥的。再进行组装。
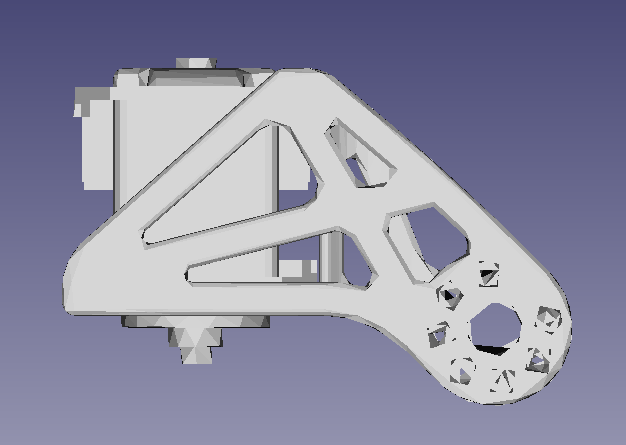
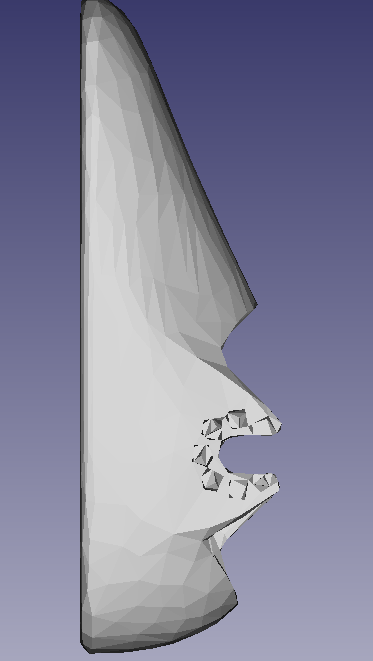
但是成本也是挺高的呢。
3,关于走路
貌似不能独立走路需要人,手扶着才能走路。
看来走路是个非常难的问题了。
需要控制平衡。

不过貌似能够独立站着了。可以通过手臂保持平衡。
4,关于模拟器
poppy项目还有个模拟器,可以进行模拟。
https://www.poppy-project.org/creatures/get-started-with-poppy/
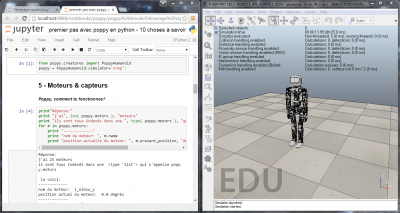
同时可以把控制直接接入到pc当中。
需要usb驱动。https://github.com/poppy-project/pypot
安装完驱动,就可以通过电脑控制机器人了。
关于机器人的视频介绍:
https://player.vimeo.com/video/76917854?wmode=opaque
这个超级赞,是组装机器人的视频。
https://player.vimeo.com/video/96262428?wmode=opaque

项目的技术资料:
https://www.poppy-project.org/technologies/
5,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48661397 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
机器人的开源项目真的是越来越多了。
同时,这个项目使用的是python开发的。降低了学习成本。
是个容易上手的机器人开源项目。

















 636
636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









