






BLDC有感仿真模型
双闭环控制,带霍尔传感器,其中霍尔处理,换相逻辑用代码实现的,容易理解,为方便转化到代码。
ID:2650665602178411
宸哥电子
BLDC有感仿真模型是一种采用双闭环控制的无刷直流电机(BLDC)仿真模型,其中包含了霍尔传感器以及通过代码实现的换相逻辑。本文将详细介绍该模型的设计原理、功能特点以及实现方法,并探讨其在实际应用中的优势和局限性。
在传统的BLDC电机控制系统中,通常采用霍尔传感器来检测转子位置,从而确定换相时机。然而,由于霍尔传感器的存在,系统的成本和复杂度都会增加。为了降低成本并简化系统结构,本文提出了一种基于代码实现的换相逻辑方案。
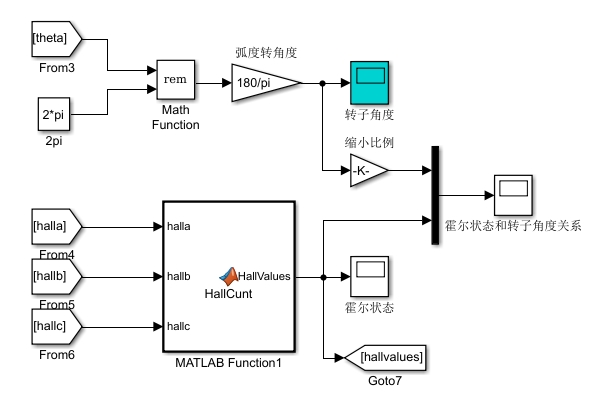
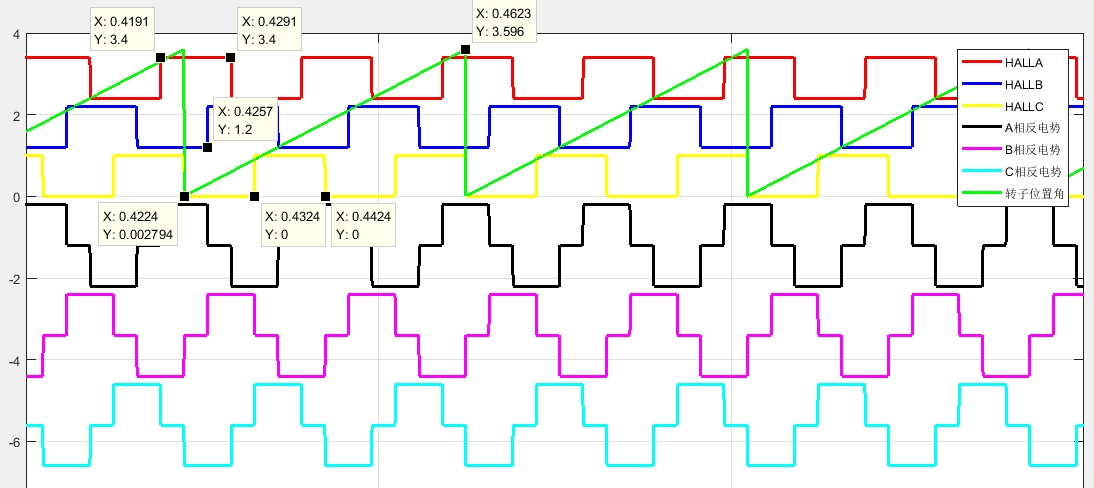
首先,我们需要了解BLDC电机的基本原理。BLDC电机由定子和转子组成,其中定子上绕有三组电磁线圈,而转子上则镶嵌有永磁体。通过控制不同线圈的通断情况,可以实现电机的转向和转速控制。在BLDC电机中,霍尔传感器的作用是检测转子位置,进而确定电流通过哪些线圈。而通过代码实现的换相逻辑则可以替代霍尔传感器,实现电机的准确控制。
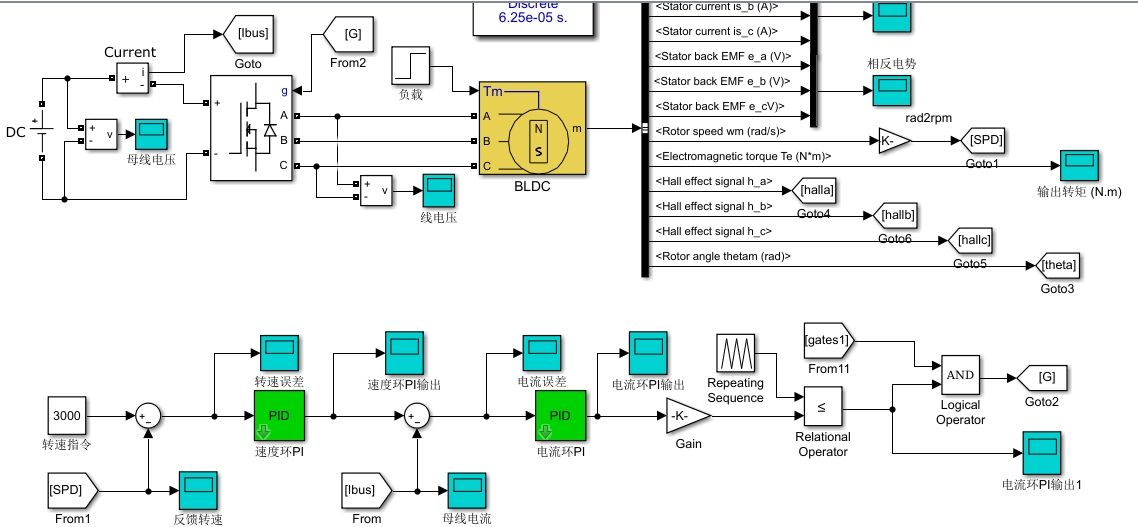
具体而言,双闭环控制是本文提出的BLDC有感仿真模型的关键技术之一。这种控制方法包含两个闭环控制回路:一个是转速闭环控制,通过对电机的转速进行反馈,实现转速的稳定性和精度;另一个是电流闭环控制,通过对电机的相电流进行反馈,实现电流的稳定性和动态响应性。这种双闭环控制结构可以有效提高电机的运行效率和稳定性。
在实际应用中,BLDC有感仿真模型具有以下优势。首先,代码实现的换相逻辑消除了霍尔传感器的使用,降低了系统成本和复杂度。其次,双闭环控制结构能够实现高精度的转速和电流控制,提高了电机的运行效率和动态响应性。此外,由于模型的可编程性,可以根据具体需求进行灵活的参数调整和功能扩展。
然而,BLDC有感仿真模型也存在一些局限性。首先,代码实现的换相逻辑需要经过精确的算法设计和编码实现,对开发人员的技术能力要求较高。其次,双闭环控制结构需要对多个参数进行调整和优化,这对于系统调试和维护提出了一定的挑战。此外,模型的稳定性和鲁棒性还需要进一步研究和改进。
综上所述,BLDC有感仿真模型是一种基于双闭环控制和代码实现的BLDC电机控制方案。通过消除霍尔传感器的使用,并结合精确的转速和电流控制,该模型能够降低系统成本和复杂度,提高电机的运行效率和稳定性。然而,对于模型的算法设计和系统调试仍需进一步研究和优化。希望本文的介绍和分析能够对相关领域的研究和应用提供一定的参考和启示。
以上相关代码,程序地址:http://coupd.cn/665602178411.html















 8万+
8万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









