







1、背景
大三自动化专业学生一枚,在一次实习中学习了电机的双闭环控制系统的设计,过程颇为曲折,因此决定在此记录一下。
在此感谢吴老师和盛老师的细心教导。
本文主打得就是一个详细,不会跳过任何过程。但只涉及:
- 系统数学模型(传递函数)的建立和简化
- 调节器结构的选择和参数的确定(PI调节器的参数)
关于双闭环控制系统具体是如何实现的,双闭环系统的实现思路,具体的电路等内容,本文并不涉及。
目录
2、设计思路
首先要明白,由于对我们来说,设计就是找经典的案例,分析并理解他的结构,然后把我们的数据带进去。因此设计这个电机的双闭环控制系统的主要任务与难点是:
两个控制器的参数的确定,即两个PI调节器的参数选取。
这是一个拥有两个反馈回路的双闭环系统,多环系统的设计步骤是:
先内环后外环。
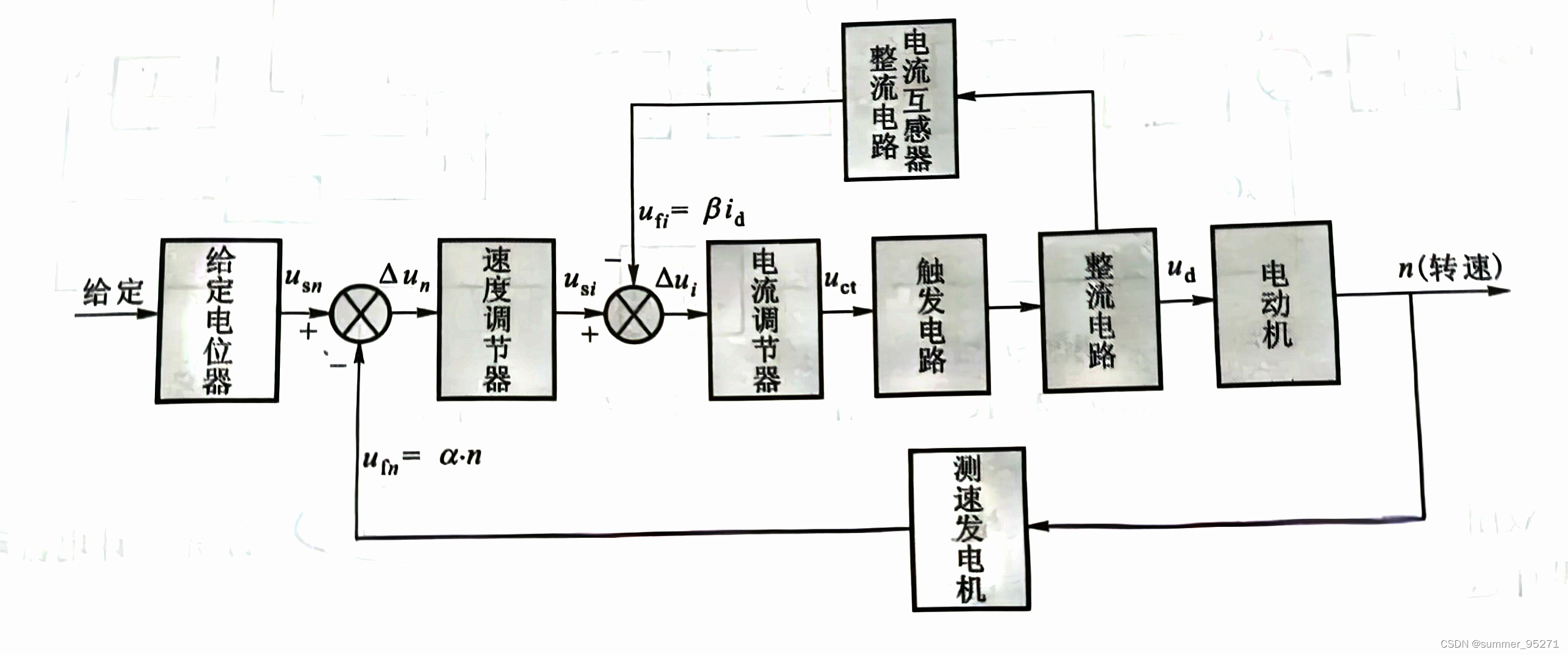
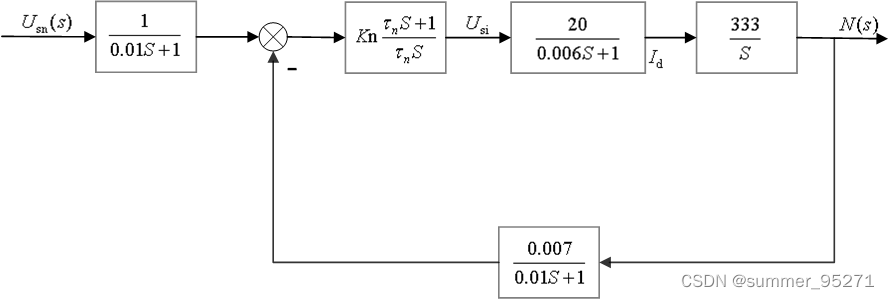
3、系统方框图介绍
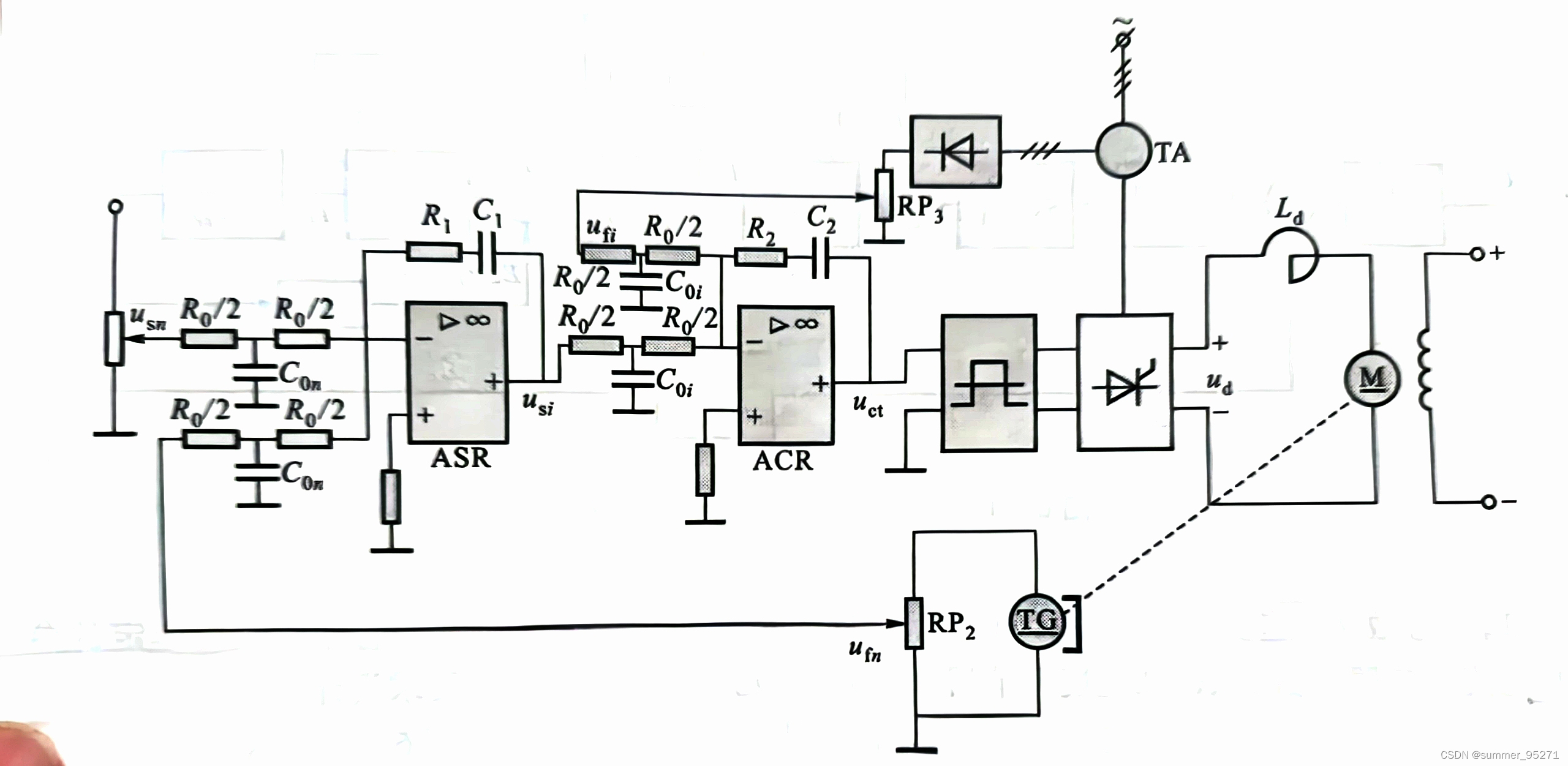
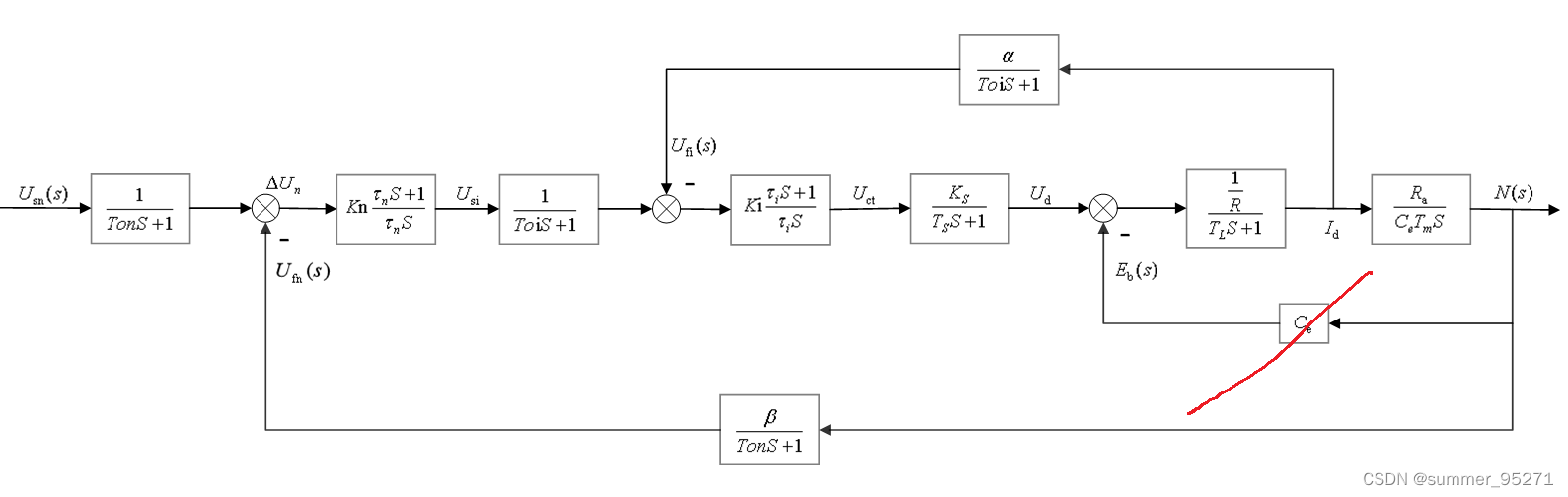
这张图简单看过即可,不细说。其中ASR为速度调节器,ACR为电流调节器,它俩实际就是PI调节器。重点是下面这张图:
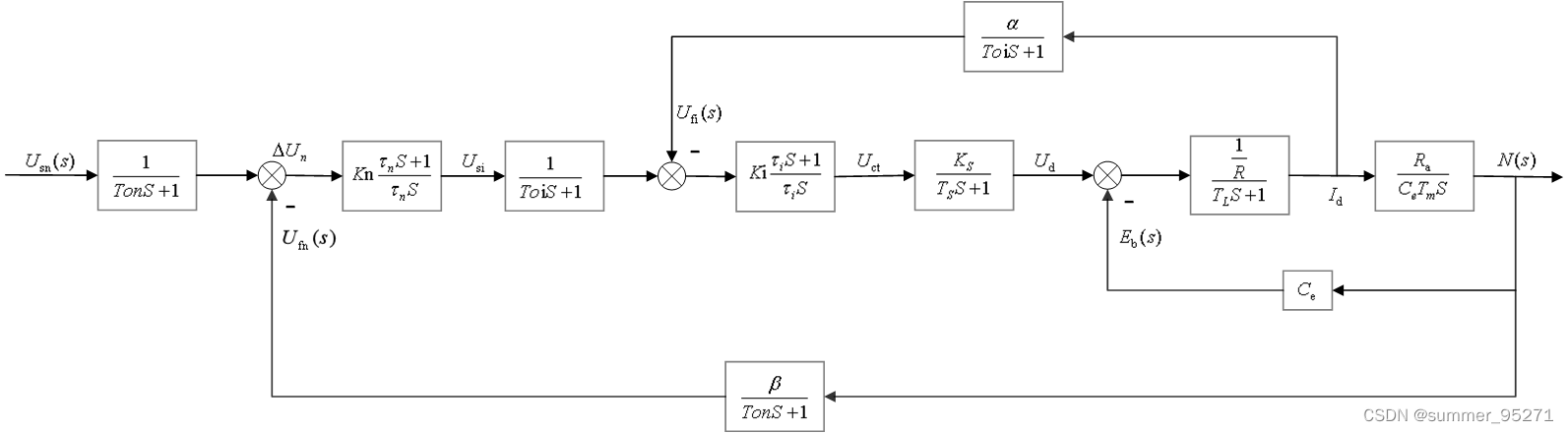
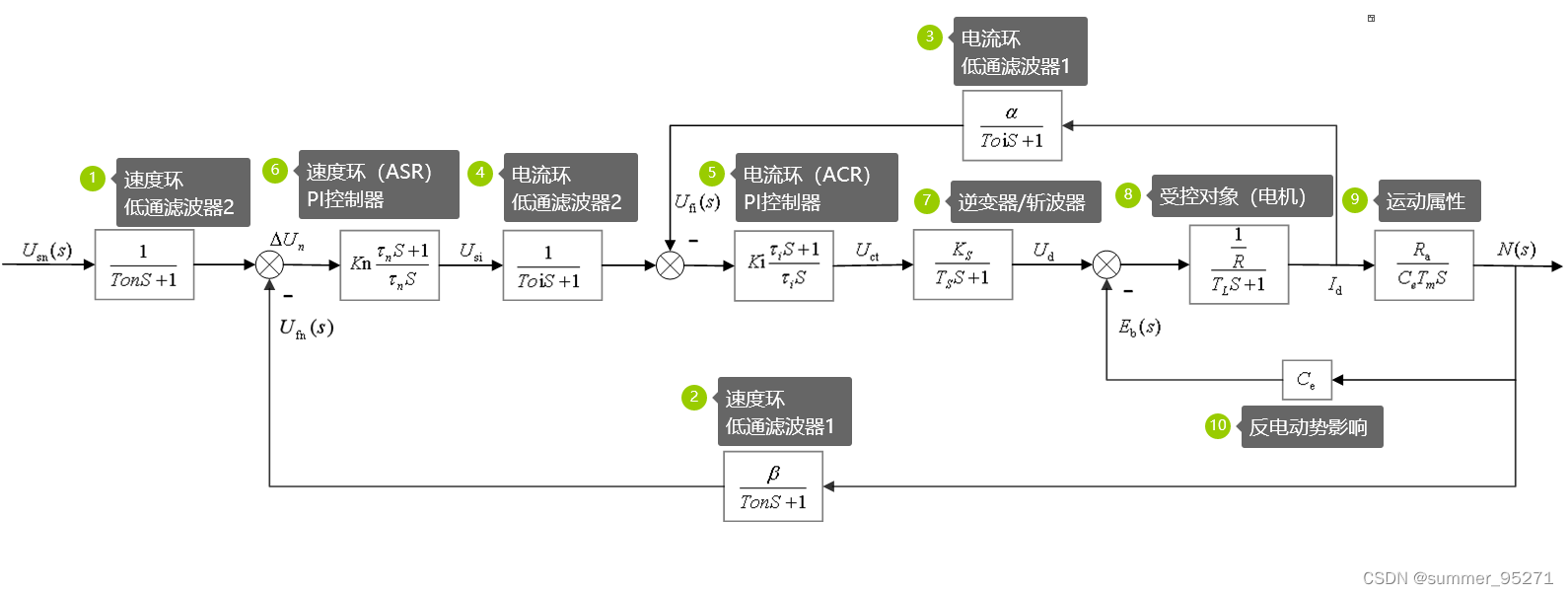
各个框图中传递函数所描述的对象已进行备注,请自行观看理解。需要说明的是:
- 这个双闭环方框图适用于控制不同的电机。例如:直流有刷电机、三相永磁同步电机、三相感应电机、无刷直流电机。只需要在受控对象方框中填入描述相应电机的传递函数即可。
- 电流环和速度环都需要两个低通滤波器。因为低通滤波器中包含惯性环节,在反馈中加入低通滤波器后,输入与反馈会产生时间差,因此在相应的输入也加入低通滤波器。
4、设计过程
4.1参数选定:
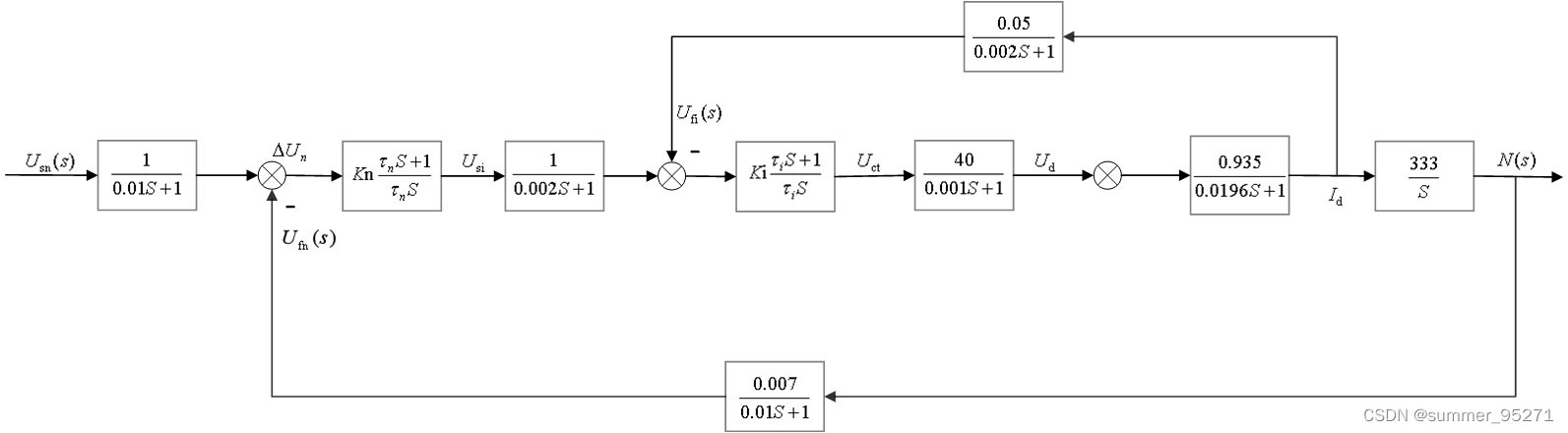
首先一定要明确哪些是确定的参数,哪些是未知待定,需要我们求的参数。在图三所示的方框图中:
系统固有参数:
预先选定的参数:电流反馈系数,速度反馈系数
,电流反馈滤波时间常数
,速度反馈滤波时间常数
需要计算求出的参数:电流调节器参数,
速度调节器参数
,
下面以我实习的课题与参数为例:
电机:三相永磁同步电机
系统固有参数选取:
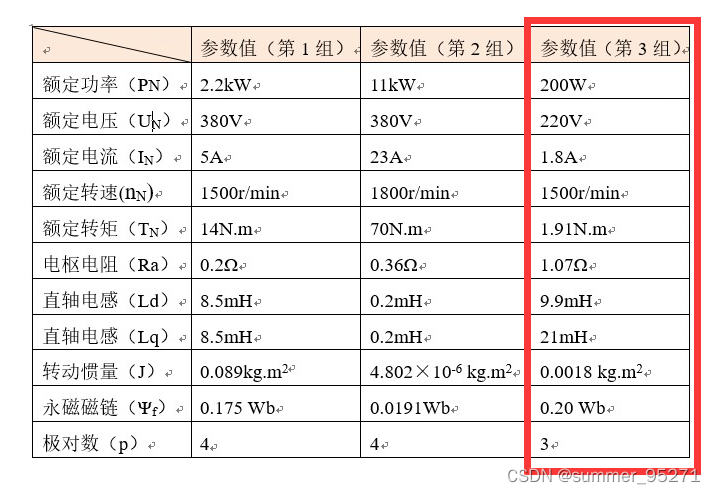
,
预先选定的参数:
电流反馈系数
,速度反馈系数
, 电流反馈滤波时间常数,
,速度反馈滤波时间常数
。
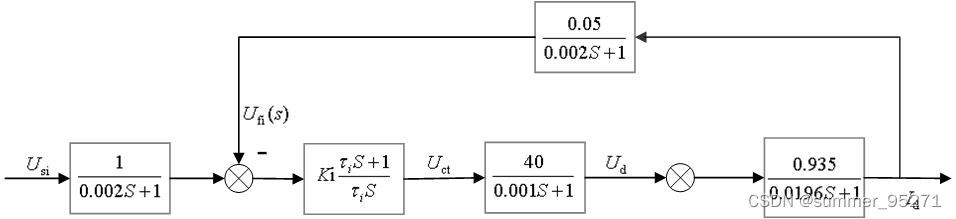
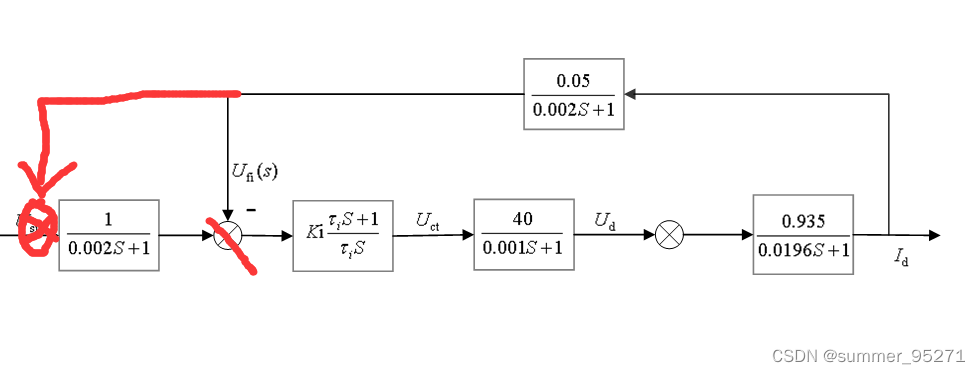
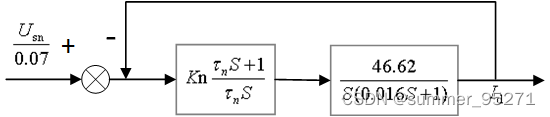
4.2电流环参数选取:
因为转速对于给定信号的响应时间比电流对于给定信号的响应时间长得多,因此在计算电流的动态响应时,可以把转速看作恒值量,即将反电动势E近似地视为不变,而恒值量对动态分量是没有影响的,所以在分析电流环动态响应时,
可以把反电动势E忽略不计,也就是把方框图里那个支路去掉。
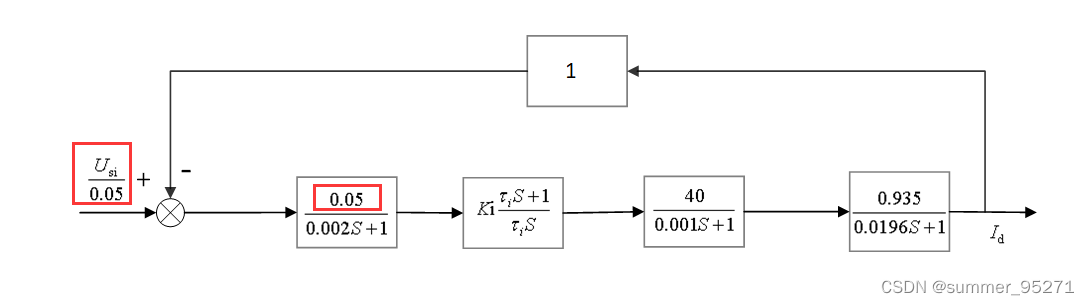
将电流环动态结构图化解,并将参数带入:
先将目标聚焦于电流内环:
根据自控原理中动态结构图的等效变换与化简的原理,将综合点前移,化简步骤如下:
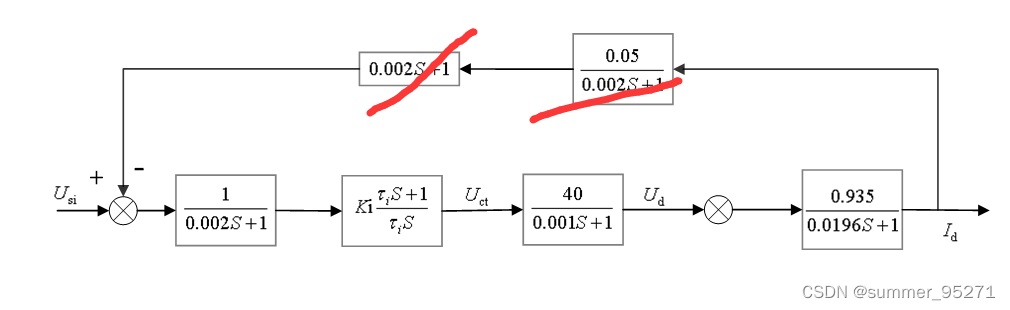
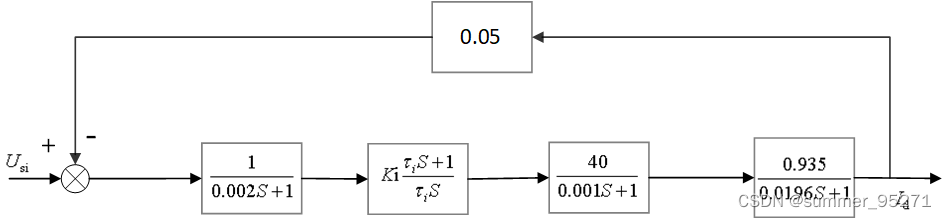
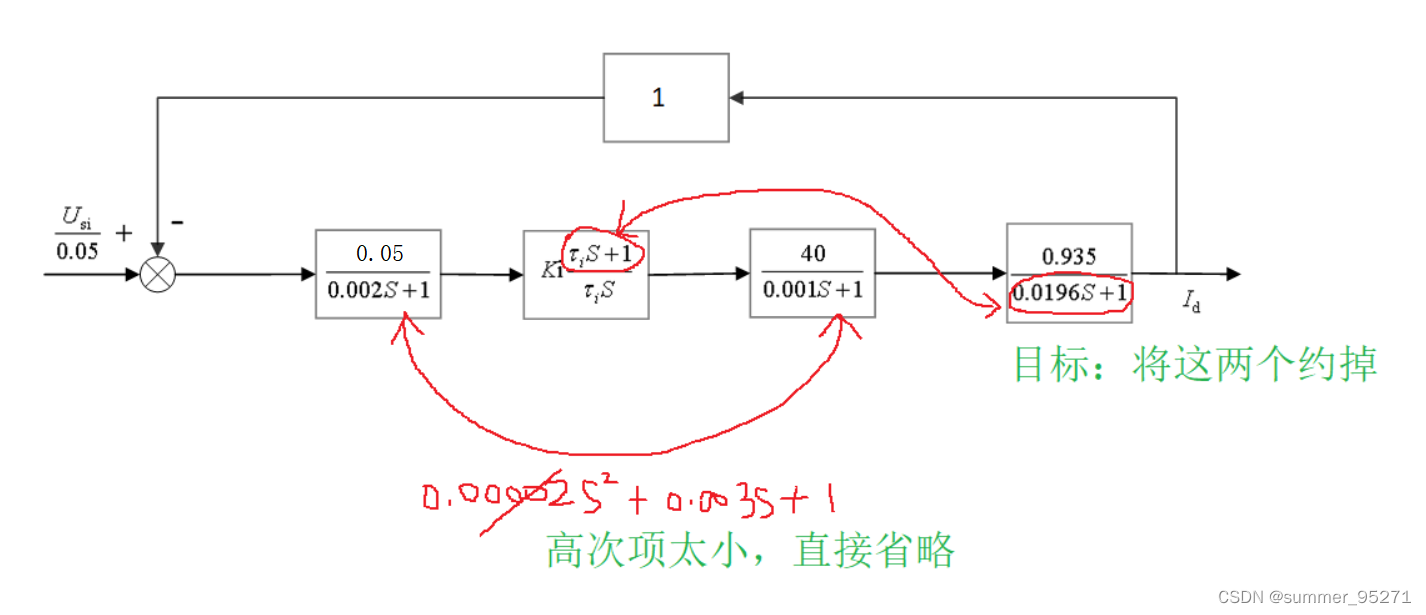
下面一步是化简的难点:
因为:
所以:
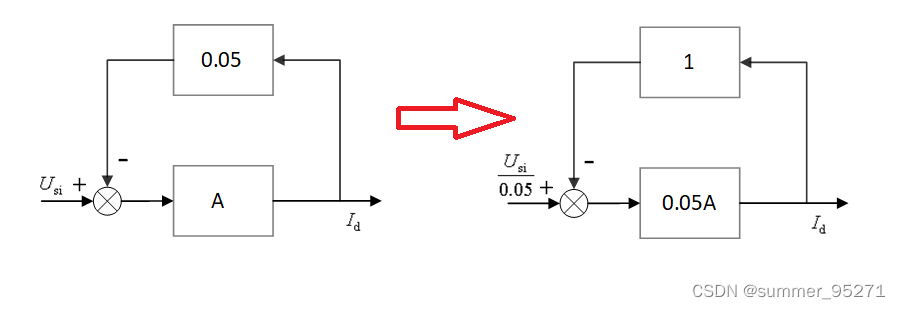
接下来进行两个操作:
-
,将二次项省略。
- 利用速度环PI调节器,把大惯性(0.0196>>0.001,相较于逆变器,它是大惯性环节)环节约掉。
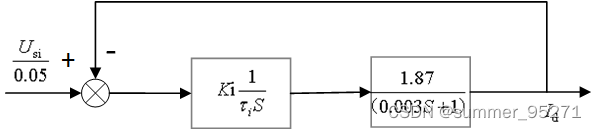
令
,则可以将被控对象的惯性环节约掉。
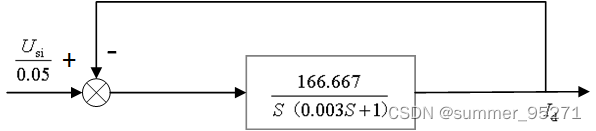
最终化简为:
上面的公式是电流环的开环传递函数,我们将其化为典型 I 型的传递函数的形式:。
根据自控理论,当预期特性为典型 I 型系统时,当 ,可以获得较好的平稳性和快速型。
得到:
,
,
电流环控制器传递函数为:
至此,电流环设计完毕:
4.3速度环参数选取:
电流环的闭环传递函数为:
得到速度环的动态结构图:
将速度环化为单位负反馈,合并小惯性环节的操作与电流环中的处理相类似,此处不再缀叙。化简结果如下:
根据自控理论,当预期特性为典型 II 型系统时,工程中常用两个准则来确定K和的值,在此,我们根据
准则,即使得系统开环频率特性中的相位裕量为最大的准则选取参数。
准则中规定:
,当h取不同值时,系统的特性不同。
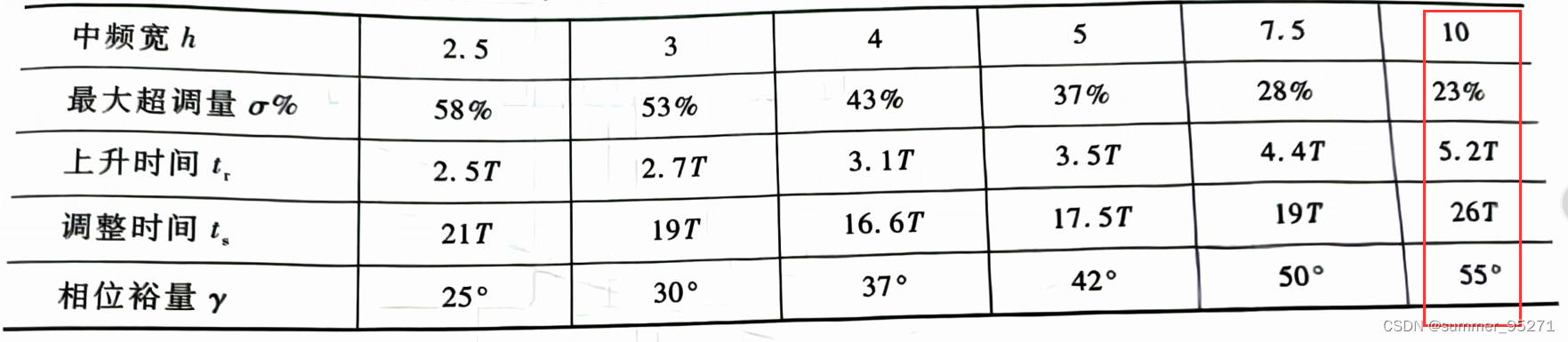
这里,我们取h=10,则超调量最小,同时,得知,相位裕量 ,最后我们将在matlab中利用controlsystemdesign工具来进行验证。
根据 ,得到:
得
,
,所以
,
速度环控制器传递函数为:
至此,电流环和速度环的设计都已经完成。

5、仿真验证
打开controlsystemdesigner仿真器。
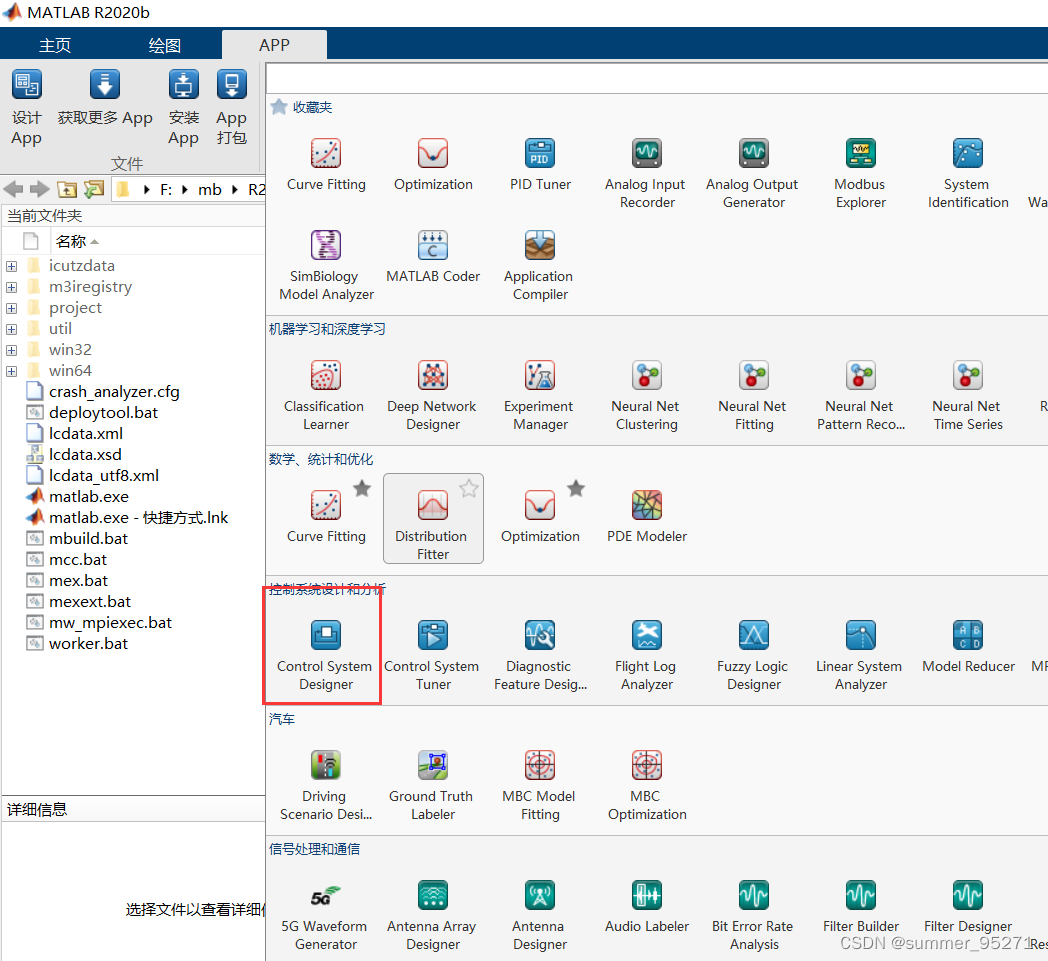
选择双闭环结构模型
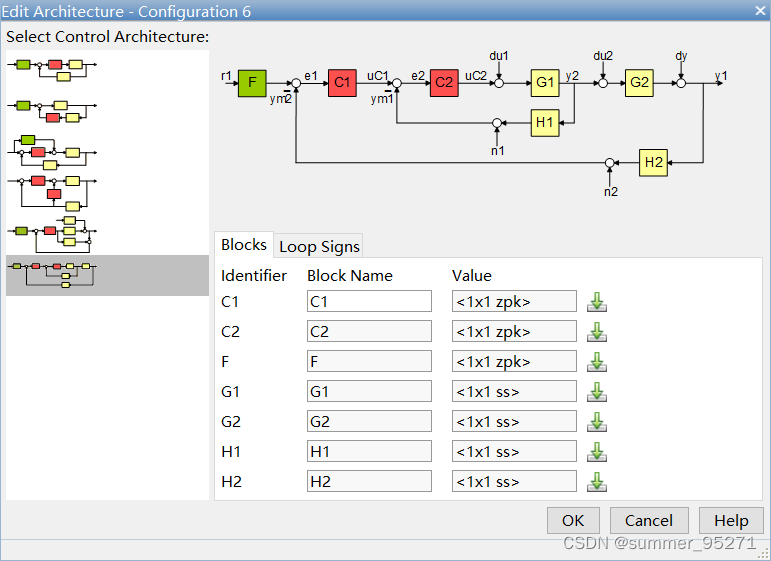
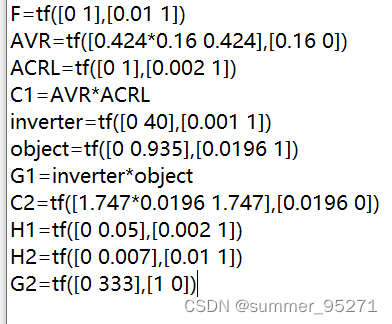
在脚本中创建变量,在这个过程中将我们动态结构图的各个部分适当合并,套入这个模型中,最后导入变量。
电流环伯德图如下,可见系统稳定性能良好:

速度环伯德图如下,可见相位裕量如我们所预期的那样,为55度。
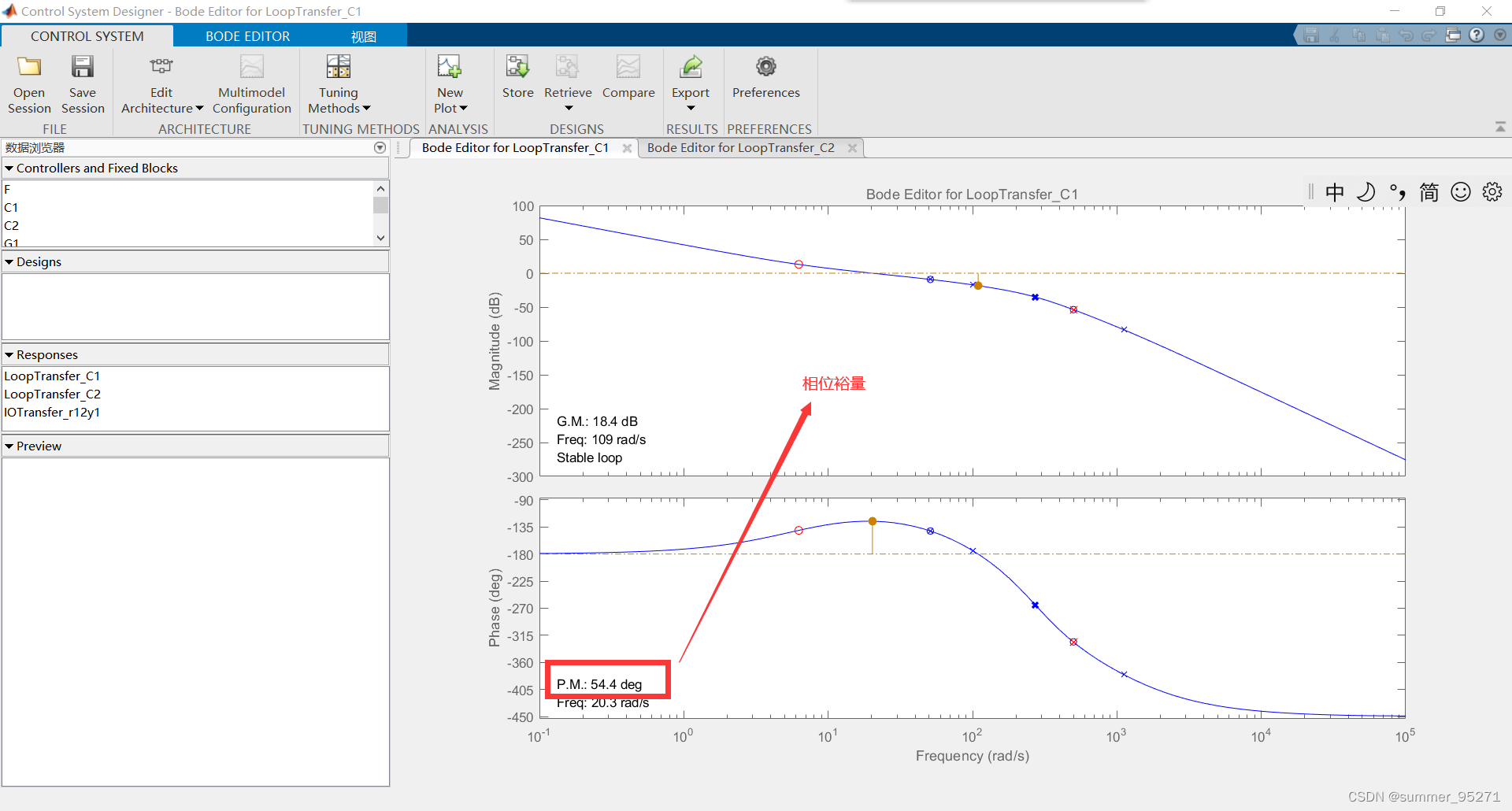
因此,系统设计成功!
6、参考书目
自动控制原理及其应用 黄坚 第二版















 436
436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









