






静态补偿电压仿真模型(Harnefors Observer)Matlab 2020b版本
该观测器来源Harnefors教授论文
《Synchronization at startup and stable rotation reversal of sensorless nonsalient PMSM drives》中提到的观测器
该观测器有以下优势:
1.理论上完全证明了初始角度无论误差多大都能保证最终估算角度收敛。
2.论文中提供的参考C代码就十行左右,原理清楚,结构简单。
3.只有一个LAMBDA参数需要调整,文章上也给出了建议范围,即略微大于2,相当于基本不需要调参,观测器通用性非常强。
4.启动及低速控制对定子电阻变化不敏感。
仿真模型特点:
1.仿真模型使用离散化模型,与真实数字化执行结果相近。
2.仿真模型使用标幺化形式,方便替换电机参数观测仿真结果。
3.论文中分析的仅用于表贴式电机,仿真模型使用有效磁链概念拓展到表贴和内嵌电机通用。
4.M文件中提供了电机初始角度参数,可任意设定初始角度,观察观测器角度收敛情况。
实际仿真:任意初始角度都可以启动成功。
5.M文件中提供了电机初始负载大小 ,可任意设定0到额定负载,观察观测器角度收敛情况。
实际仿真:带额定负载也可以启动成功。
6.提供三种速度给定方式(1)斜坡速度指令 (2)阶跃速度指令 (3)正反转速度指令。
实际仿真:都能达到设定速度。
7.模型中提供了MTPA,弱磁,电流环和速度环参数自整定等模块,保证模型能正常运行。
文件包括:
1.论文参考文献。
2.仿真模型源文件。
ID:16399770653137515
旋转的世界
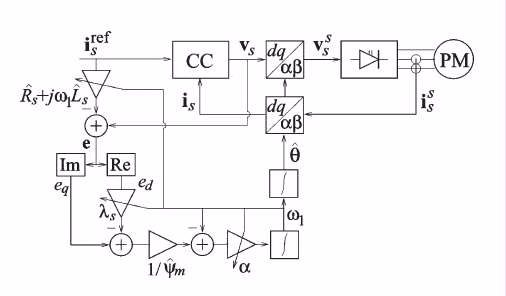


静态补偿电压仿真模型(Harnefors Observer)是基于Harnefors教授的研究成果的观测器。该观测器的优势主要集中在以下几个方面。
首先,从理论上来看,该观测器能够保证无论初始角度误差有多大,最终估算角度都能够收敛。这一点在lunwen的研究中得到充分的论证。
其次,该观测器的C代码实现非常简单,只需约十行代码。这使得观测器的原理清晰易懂,结构简单明了。
第三,在使用该观测器时,只需要调整一个参数LAMBDA。lunwen的研究文章中给出了该参数的建议范围,即略微大于2。这意味着观测器的通用性非常强,几乎不需要进行复杂的参数调整。
第四,该观测器对于启动及低速控制对定子电阻变化不敏感。这意味着在实际应用中,即使定子电阻发生变化,观测器依然能够保持良好的性能。
仿真模型的特点也是非常值得关注的。
首先,仿真模型采用离散化模型,与真实数字化执行结果相近。这使得仿真模型的结果可以与实际情况相匹配。
其次,仿真模型采用了标幺化形式,这使得可以很方便地替换电机参数,进一步观察仿真结果。
第三,lunwen的研究仅针对表贴式电机进行了分析,但是该仿真模型使用有效磁链概念拓展到了表贴和内嵌电机通用。这意味着该仿真模型的适用范围更广。
第四,在M文件中,提供了电机初始角度参数,可以任意设定初始角度,并观察观测器角度收敛情况。在实际仿真中,无论初始角度如何,都能够成功启动。
第五,在M文件中,还提供了电机初始负载大小的参数,可以任意设定0到额定负载,并观察观测器角度收敛情况。实际仿真结果表明,带额定负载的电机也能够成功启动。
第六,仿真模型中提供了三种速度给定方式,包括斜坡速度指令、阶跃速度指令和正反转速度指令。实际仿真结果表明,这些速度给定方式都能够达到设定速度。
最后,模型中还提供了MTPA、弱磁、电流环和速度环参数自整定等模块,保证模型能够正常运行。
总之,该静态补偿电压仿真模型(Harnefors Observer)的优势在于理论上的收敛性证明、简单明了的代码实现、参数调整的便利性以及对电机负载和定子电阻变化的鲁棒性。同时,仿真模型的离散化形式和标幺化形式与实际情况相近,适用范围广泛。通过该仿真模型,可以对电机的启动、低速控制和速度响应等进行准确的仿真分析。
以上相关代码,程序地址:http://fansik.cn/770653137515.html
















 1189
1189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









