







| 日期 | 内核版本 | 架构 | 作者 | GitHub | CSDN |
|---|---|---|---|---|---|
| 2016-06-14 | Linux-4.6 | X86 & arm | gatieme | LinuxDeviceDrivers | Linux进程管理与调度 |
1 前景回顾
1.1 进程调度
内存中保存了对每个进程的唯一描述, 并通过若干结构与其他进程连接起来.
调度器面对的情形就是这样, 其任务是在程序之间共享CPU时间, 创造并行执行的错觉, 该任务分为两个不同的部分, 其中一个涉及调度策略, 另外一个涉及上下文切换.
内核必须提供一种方法, 在各个进程之间尽可能公平地共享CPU时间, 而同时又要考虑不同的任务优先级.
调度器的一个重要目标是有效地分配 CPU 时间片,同时提供很好的用户体验。调度器还需要面对一些互相冲突的目标,例如既要为关键实时任务最小化响应时间, 又要最大限度地提高 CPU 的总体利用率.
调度器的一般原理是, 按所需分配的计算能力, 向系统中每个进程提供最大的公正性, 或者从另外一个角度上说, 他试图确保没有进程被亏待.
1.2 进程的分类
linux把进程区分为实时进程和非实时进程, 其中非实时进程进一步划分为交互式进程和批处理进程
| 类型 | 描述 | 示例 |
|---|---|---|
| 交互式进程(interactive process) | 此类进程经常与用户进行交互, 因此需要花费很多时间等待键盘和鼠标操作. 当接受了用户的输入后, 进程必须很快被唤醒, 否则用户会感觉系统反应迟钝 | shell, 文本编辑程序和图形应用程序 |
| 批处理进程(batch process) | 此类进程不必与用户交互, 因此经常在后台运行. 因为这样的进程不必很快相应, 因此常受到调度程序的怠慢 | 程序语言的编译程序, 数据库搜索引擎以及科学计算 |
| 实时进程(real-time process) | 这些进程由很强的调度需要, 这样的进程绝不会被低优先级的进程阻塞. 并且他们的响应时间要尽可能的短 | 视频音频应用程序, 机器人控制程序以及从物理传感器上收集数据的程序 |
在linux中, 调度算法可以明确的确认所有实时进程的身份, 但是没办法区分交互式程序和批处理程序, linux2.6的调度程序实现了基于进程过去行为的启发式算法, 以确定进程应该被当做交互式进程还是批处理进程. 当然与批处理进程相比, 调度程序有偏爱交互式进程的倾向
1.3 不同进程采用不同的调度策略
根据进程的不同分类Linux采用不同的调度策略.
对于实时进程,采用FIFO或者Round Robin的调度策略.
对于普通进程,则需要区分交互式和批处理式的不同。传统Linux调度器提高交互式应用的优先级,使得它们能更快地被调度。而CFS和RSDL等新的调度器的核心思想是”完全公平”。这个设计理念不仅大大简化了调度器的代码复杂度,还对各种调度需求的提供了更完美的支持.
注意Linux通过将进程和线程调度视为一个,同时包含二者。进程可以看做是单个线程,但是进程可以包含共享一定资源(代码和/或数据)的多个线程。因此进程调度也包含了线程调度的功能.
目前非实时进程的调度策略比较简单, 因为实时进程值只要求尽可能快的被响应, 基于优先级, 每个进程根据它重要程度的不同被赋予不同的优先级,调度器在每次调度时, 总选择优先级最高的进程开始执行. 低优先级不可能抢占高优先级, 因此FIFO或者Round Robin的调度策略即可满足实时进程调度的需求.
但是普通进程的调度策略就比较麻烦了, 因为普通进程不能简单的只看优先级, 必须公平的占有CPU, 否则很容易出现进程饥饿, 这种情况下用户会感觉操作系统很卡, 响应总是很慢,因此在linux调度器的发展历程中经过了多次重大变动, linux总是希望寻找一个最接近于完美的调度策略来公平快速的调度进程.
1.4 linux调度器的演变
一开始的调度器是复杂度为 O(n) 的始调度算法(实际上每次会遍历所有任务,所以复杂度为O(n)), 这个算法的缺点是当内核中有很多任务时,调度器本身就会耗费不少时间,所以,从linux2.5开始引入赫赫有名的 O(1) 调度器
然而,linux是集全球很多程序员的聪明才智而发展起来的超级内核,没有最好,只有更好,在 O(1) 调度器风光了没几天就又被另一个更优秀的调度器取代了,它就是CFS调度器Completely Fair Scheduler. 这个也是在2.6内核中引入的,具体为2.6.23,即从此版本开始,内核使用CFS作为它的默认调度器, O(1) 调度器被抛弃了, 其实CFS的发展也是经历了很多阶段,最早期的楼梯算法(SD), 后来逐步对SD算法进行改进出RSDL(Rotating Staircase Deadline Scheduler), 这个算法已经是”完全公平”的雏形了, 直至CFS是最终被内核采纳的调度器, 它从RSDL/SD中吸取了完全公平的思想,不再跟踪进程的睡眠时间,也不再企图区分交互式进程。它将所有的进程都统一对待,这就是公平的含义。CFS的算法和实现都相当简单,众多的测试表明其性能也非常优越
| 字段 | 版本 |
|---|---|
| O(n)的始调度算法 | linux-0.11~2.4 |
| O(1)调度器 | linux-2.5 |
| CFS调度器 | linux-2.6~至今 |
2 Linux的调度器组成
2.1 2个调度器
可以用两种方法来激活调度
一种是直接的, 比如进程打算睡眠或出于其他原因放弃CPU
另一种是通过周期性的机制, 以固定的频率运行, 不时的检测是否有必要
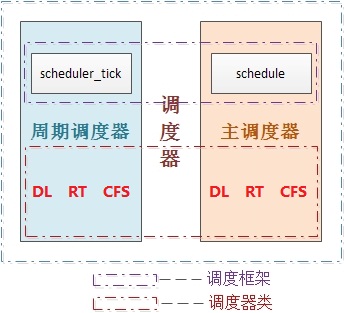
因此当前linux的调度程序由两个调度器组成:主调度器,周期性调度器(两者又统称为通用调度器(generic scheduler)或核心调度器(core scheduler))
并且每个调度器包括两个内容:调度框架(其实质就是两个函数框架)及调度器类
2.2 6种调度策略
linux内核目前实现了6中调度策略(即调度算法), 用于对不同类型的进程进行调度, 或者支持某些特殊的功能
比如SCHED_NORMAL和SCHED_BATCH调度普通的非实时进程, SCHED_FIFO和SCHED_RR和SCHED_DEADLINE则采用不同的调度策略调度实时进程, SCHED_IDLE则在系统空闲时调用idle进程.
idle的运行时机
idle 进程优先级为MAX_PRIO,即最低优先级。
早先版本中,idle是参与调度的,所以将其优先级设为最低,当没有其他进程可以运行时,才会调度执行 idle
而目前的版本中idle并不在运行队列中参与调度,而是在cpu全局运行队列rq中含idle指针,指向idle进程, 在调度器发现运行队列为空的时候运行, 调入运行
| 字段 | 描述 | 所在调度器类 |
|---|---|---|
| SCHED_NORMAL | (也叫SCHED_OTHER)用于普通进程,通过CFS调度器实现。SCHED_BATCH用于非交互的处理器消耗型进程。SCHED_IDLE是在系统负载很低时使用 | CFS |
| SCHED_BATCH | SCHED_NORMAL普通进程策略的分化版本。采用分时策略,根据动态优先级(可用nice()API设置),分配CPU运算资源。注意:这类进程比上述两类实时进程优先级低,换言之,在有实时进程存在时,实时进程优先调度。但针对吞吐量优化, 除了不能抢占外与常规任务一样,允许任务运行更长时间,更好地使用高速缓存,适合于成批处理的工作 | CFS |
| SCHED_IDLE | 优先级最低,在系统空闲时才跑这类进程(如利用闲散计算机资源跑地外文明搜索,蛋白质结构分析等任务,是此调度策略的适用者) | CFS-IDLE |
| SCHED_FIFO | 先入先出调度算法(实时调度策略),相同优先级的任务先到先服务,高优先级的任务可以抢占低优先级的任务 | RT |
| SCHED_RR | 轮流调度算法(实时调度策略),后者提供 Roound-Robin 语义,采用时间片,相同优先级的任务当用完时间片会被放到队列尾部,以保证公平性,同样,高优先级的任务可以抢占低优先级的任务。不同要求的实时任务可以根据需要用sched_setscheduler() API设置策略 | RT |
| SCHED_DEADLINE | 新支持的实时进程调度策略,针对突发型计算,且对延迟和完成时间高度敏感的任务适用。基于Earliest Deadline First (EDF) 调度算法 | DL |
linux内核实现的6种调度策略, 前面三种策略使用的是cfs调度器类,后面两种使用rt调度器类, 最后一个使用DL调度器类
2.3 5个调度器类
而依据其调度策略的不同实现了5个调度器类, 一个调度器类可以用一种种或者多种调度策略调度某一类进程, 也可以用于特殊情况或者调度特殊功能的进程.
| 调度器类 | 描述 | 对应调度策略 |
|---|---|---|
| stop_sched_class | 优先级最高的线程,会中断所有其他线程,且不会被其他任务打断 作用 1.发生在cpu_stop_cpu_callback 进行cpu之间任务migration 2.HOTPLUG_CPU的情况下关闭任务 | 无, 不需要调度普通进程 |
| dl_sched_class | 采用EDF最早截至时间优先算法调度实时进程 | SCHED_DEADLINE |
| rt_sched_class | 采用提供 Roound-Robin算法或者FIFO算法调度实时进程 具体调度策略由进程的task_struct->policy指定 | SCHED_FIFO, SCHED_RR |
| fair_sched_clas | 采用CFS算法调度普通的非实时进程 | SCHED_NORMAL, SCHED_BATCH |
| idle_sched_class | 采用CFS算法调度idle进程, 每个cup的第一个pid=0线程:swapper,是一个静态线程。调度类属于:idel_sched_class,所以在ps里面是看不到的。一般运行在开机过程和cpu异常的时候做dump | SCHED_IDLE |
其所属进程的优先级顺序为
stop_sched_class -> dl_sched_class -> rt_sched_class -> fair_sched_class -> idle_sched_class2.4 3个调度实体
调度器不限于调度进程, 还可以调度更大的实体, 比如实现组调度: 可用的CPUI时间首先在一半的进程组(比如, 所有进程按照所有者分组)之间分配, 接下来分配的时间再在组内进行二次分配.
这种一般性要求调度器不直接操作进程, 而是处理可调度实体, 因此需要一个通用的数据结构描述这个调度实体,即seched_entity结构, 其实际上就代表了一个调度对象,可以为一个进程,也可以为一个进程组.
linux中针对当前可调度的实时和非实时进程, 定义了类型为seched_entity的3个调度实体
| 调度实体 | 名称 | 描述 | 对应调度器类 |
|---|---|---|---|
| sched_dl_entity | DEADLINE调度实体 | 采用EDF算法调度的实时调度实体 | dl_sched_class |
| sched_rt_entity | RT调度实体 | 采用Roound-Robin或者FIFO算法调度的实时调度实体 | rt_sched_class |
| sched_entity | CFS调度实体 | 采用CFS算法调度的普通非实时进程的调度实体 | fair_sched_class |
2.5 调度器类的就绪队列
另外,对于调度框架及调度器类,它们都有自己管理的运行队列,调度框架只识别rq(其实它也不能算是运行队列),而对于cfs调度器类它的运行队列则是cfs_rq(内部使用红黑树组织调度实体),实时rt的运行队列则为rt_rq(内部使用优先级bitmap+双向链表组织调度实体), 此外内核对新增的dl实时调度策略也提供了运行队列dl_rq
2.6 调度器整体框架
本质上, 通用调度器(核心调度器)是一个分配器,与其他两个组件交互.
调度器用于判断接下来运行哪个进程.
内核支持不同的调度策略(完全公平调度, 实时调度, 在无事可做的时候调度空闲进程,即0号进程也叫swapper进程,idle进程), 调度类使得能够以模块化的方法实现这些侧露额, 即一个类的代码不需要与其他类的代码交互
当调度器被调用时, 他会查询调度器类, 得知接下来运行哪个进程在选中将要运行的进程之后, 必须执行底层的任务切换.
这需要与CPU的紧密交互. 每个进程刚好属于某一调度类, 各个调度类负责管理所属的进程. 通用调度器自身不涉及进程管理, 其工作都委托给调度器类.
每个进程都属于某个调度器类(由字段task_struct->sched_class标识), 由调度器类采用进程对应的调度策略调度(由task_struct->policy )进行调度, task_struct也存储了其对应的调度实体标识
linux实现了6种调度策略, 依据其调度策略的不同实现了5个调度器类, 一个调度器类可以用一种或者多种调度策略调度某一类进程, 也可以用于特殊情况或者调度特殊功能的进程.
| 调度器类 | 调度策略 | 调度策略对应的调度算法 | 调度实体 | 调度实体对应的调度对象 |
|---|---|---|---|---|
| stop_sched_class | 无 | 无 | 无 | 特殊情况, 发生在cpu_stop_cpu_callback 进行cpu之间任务迁移migration或者HOTPLUG_CPU的情况下关闭任务 |
| dl_sched_class | SCHED_DEADLINE | Earliest-Deadline-First最早截至时间有限算法 | sched_dl_entity | 采用DEF最早截至时间有限算法调度实时进程 |
| rt_sched_class | SCHED_RR SCHED_FIFO | Roound-Robin时间片轮转算法 FIFO先进先出算法 | sched_rt_entity | 采用Roound-Robin或者FIFO算法调度的实时调度实体 |
| fair_sched_class | SCHED_NORMAL SCHED_BATCH | CFS完全公平懂调度算法 | sched_entity | 采用CFS算法普通非实时进程 |
| idle_sched_class | SCHED_IDLE | 无 | 无 | 特殊进程, 用于cpu空闲时调度空闲进程idle |
它们的关系如下图
2.7 5种调度器类为什么只有3种调度实体?
正常来说一个调度器类应该对应一类调度实体, 但是5种调度器类却只有了3种调度实体?
这是因为调度实体本质是一个可以被调度的对象, 要么是一个进程(linux中线程本质上也是进程), 要么是一个进程组, 只有dl_sched_class, rt_sched_class调度的实时进程(组)以及fair_sched_class调度的非实时进程(组)是可以被调度的实体对象, 而stop_sched_class和idle_sched_class
2.8 为什么采用EDF实时调度需要单独的调度器类, 调度策略和调度实体
linux针对实时进程实现了Roound-Robin, FIFO和Earliest-Deadline-First(EDF)算法, 但是为什么SCHED_RR和SCHED_FIFO两种调度算法都用rt_sched_class调度类和sched_rt_entity调度实体描述, 而EDF算法却需要单独用rt_sched_class调度类和sched_dl_entity调度实体描述
为什么采用EDF实时调度不用rt_sched_class调度类调度, 而是单独实现调度类和调度实体?
暂时没弄明白
3 进程调度的数据结构
调度器使用一系列数据结构来排序和管理系统中的进程. 调度器的工作方式的这些结构的涉及密切相关, 几个组件在许多方面
3.1 task_struct中调度相关的成员
struct task_struct
{
........
/* 表示是否在运行队列 */
int on_rq;
/* 进程优先级
* prio: 动态优先级,范围为100~139,与静态优先级和补偿(bonus)有关
* static_prio: 静态优先级,static_prio = 100 + nice + 20 (nice值为-20~19,所以static_prio值为100~139)
* normal_prio: 没有受优先级继承影响的常规优先级,具体见normal_prio函数,跟属于什么类型的进程有关
*/
int prio, static_prio, normal_prio;
/* 实时进程优先级 */
unsigned int rt_priority;
/* 调度类,调度处理函数类 */
const struct sched_class *sched_class;
/* 调度实体(红黑树的一个结点) */
struct sched_entity se;
/* 调度实体(实时调度使用) */
struct sched_rt_entity rt;
struct sched_dl_entity dl;
#ifdef CONFIG_CGROUP_SCHED
/* 指向其所在进程组 */
struct task_group *sched_task_group;
#endif
........
}3.1.1 优先级
int prio, static_prio, normal_prio;
unsigned int rt_priority;动态优先级 静态优先级 实时优先级
其中task_struct采用了三个成员表示进程的优先级:prio和normal_prio表示动态优先级, static_prio表示进程的静态优先级.
为什么表示动态优先级需要两个值prio和normal_prio
调度器会考虑的优先级则保存在prio. 由于在某些情况下内核需要暂时提高进程的优先级, 因此需要用prio表示. 由于这些改变不是持久的, 因此静态优先级static_prio和普通优先级normal_prio不受影响.
此外还用了一个字段rt_priority保存了实时进程的优先级
| 字段 | 描述 |
|---|---|
| static_prio | 用于保存静态优先级, 是进程启动时分配的优先级, ,可以通过nice和sched_setscheduler系统调用来进行修改, 否则在进程运行期间会一直保持恒定 |
| prio | 保存进程的动态优先级 |
| normal_prio | 表示基于进程的静态优先级static_prio和调度策略计算出的优先级. 因此即使普通进程和实时进程具有相同的静态优先级, 其普通优先级也是不同的, 进程分叉(fork)时, 子进程会继承父进程的普通优先级 |
| rt_priority | 用于保存实时优先级 |
实时进程的优先级用实时优先级rt_priority来表示
linux2.6内核将任务优先级进行了一个划分, 实时优先级范围是0到MAX_RT_PRIO-1(即99),而普通进程的静态优先级范围是从MAX_RT_PRIO到MAX_PRIO-1(即100到139)。
/* http://lxr.free-electrons.com/source/include/linux/sched/prio.h?v=4.6#L21 */
#define MAX_USER_RT_PRIO 100
#define MAX_RT_PRIO MAX_USER_RT_PRIO
/* http://lxr.free-electrons.com/source/include/linux/sched/prio.h?v=4.6#L24 */
#define MAX_PRIO (MAX_RT_PRIO + 40)
#define DEFAULT_PRIO (MAX_RT_PRIO + 20)
| 优先级范围 | 描述 |
|---|---|
| 0——99 | 实时进程 |
| 100——139 | 非实时进程 |
3.1.2 调度策略
unsigned int policy;policy保存了进程的调度策略,目前主要有以下五种:
参见
http://lxr.free-electrons.com/source/include/uapi/linux/sched.h?v=4.6#L32
/*
* Scheduling policies
*/
#define SCHED_NORMAL 0
#define SCHED_FIFO 1
#define SCHED_RR 2
#define SCHED_BATCH 3
/* SCHED_ISO: reserved but not implemented yet */
#define SCHED_IDLE 5
#define SCHED_DEADLINE 6| 字段 | 描述 | 所在调度器类 |
|---|---|---|
| SCHED_NORMAL | (也叫SCHED_OTHER)用于普通进程,通过CFS调度器实现。 | |
| SCHED_BATCH | SCHED_NORMAL普通进程策略的分化版本。采用分时策略,根据动态优先级(可用nice()API设置),分配 CPU 运算资源。注意:这类进程比两类实时进程优先级低,换言之,在有实时进程存在时,实时进程优先调度。但针对吞吐量优化 | CFS |
| SCHED_IDLE | 优先级最低,在系统空闲时才跑这类进程(如利用闲散计算机资源跑地外文明搜索,蛋白质结构分析等任务,是此调度策略的适用者) | CFS |
| SCHED_FIFO | 先入先出调度算法(实时调度策略),相同优先级的任务先到先服务,高优先级的任务可以抢占低优先级的任务 | RT |
| SCHED_RR | 轮流调度算法(实时调度策略),后 者提供 Roound-Robin 语义,采用时间片,相同优先级的任务当用完时间片会被放到队列尾部,以保证公平性,同样,高优先级的任务可以抢占低优先级的任务。不同要求的实时任务可以根据需要用sched_setscheduler()API 设置策略 | RT |
| SCHED_DEADLINE | 新支持的实时进程调度策略,针对突发型计算,且对延迟和完成时间高度敏感的任务适用。基于Earliest Deadline First (EDF) 调度算法 |
CHED_BATCH用于非交互的处理器消耗型进程
CHED_IDLE是在系统负载很低时使用CFS
SCHED_BATCH用于非交互, CPU使用密集型的批处理进程. 调度决策对此类进程给予”冷处理”: 他们绝不会抢占CF调度器处理的另一个进程, 因此不会干扰交互式进程. 如果打算使用nice值降低进程的静态优先级, 同时又不希望该进程影响系统的交互性, 此时最适合使用该调度类.
而SCHED_LDLE进程的重要性则会进一步降低, 因此其权重总是最小的
注意
尽管名称是SCHED_IDLE但是SCHED_IDLE不负责调度空闲进程. 空闲进程由内核提供单独的机制来处理
SCHED_RR和SCHED_FIFO用于实现软实时进程. SCHED_RR实现了轮流调度算法, 一种循环时间片的方法, 而SCHED_FIFO实现了先进先出的机制, 这些并不是由完全贡品调度器类CFS处理的, 而是由实时调度类处理.
3.1.3 调度策略相关字段
/* http://lxr.free-electrons.com/source/include/linux/sched.h?v=4.6#L1431 */
unsigned int policy;
/* http://lxr.free-electrons.com/source/include/linux/sched.h?v=4.6#L1413 */
const struct sched_class *sched_class;
struct sched_entity se;
struct sched_rt_entity rt;
struct sched_dl_entity dl;
cpumask_t cpus_allowed;| 字段 | 描述 |
|---|---|
| sched_class | 调度类, 调度类,调度处理函数类 |
| se | 普通进程的调用实体, 每个进程都有其中之一的实体 |
| rt | 实时进程的调用实体, 每个进程都有其中之一的实体 |
| dl | deadline的调度实体 |
| cpus_allowed | 用于控制进程可以在哪里处理器上运行 |
调度器不限于调度进程, 还可以调度更大的实体, 比如实现组调度: 可用的CPUI时间首先在一半的进程组(比如, 所有进程按照所有者分组)之间分配, 接下来分配的时间再在组内进行二次分配
cpus_allows是一个位域, 在多处理器系统上使用, 用来限制进程可以在哪些CPU上运行
3.2 调度类
sched_class结构体表示调度类, 类提供了通用调度器和各个调度器之间的关联, 调度器类和特定数据结构中汇集地几个函数指针表示, 全局调度器请求的各个操作都可以用一个指针表示, 这使得无需了解调度器类的内部工作原理即可创建通用调度器, 定义在kernel/sched/sched.h
struct sched_class {
/* 系统中多个调度类, 按照其调度的优先级排成一个链表
下一优先级的调度类
* 调度类优先级顺序: stop_sched_class -> dl_sched_class -> rt_sched_class -> fair_sched_class -> idle_sched_class
*/
const struct sched_class *next;
/* 将进程加入到运行队列中,即将调度实体(进程)放入红黑树中,并对 nr_running 变量加1 */
void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags);
/* 从运行队列中删除进程,并对 nr_running 变量中减1 */
void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags);
/* 放弃CPU,在 compat_yield sysctl 关闭的情况下,该函数实际上执行先出队后入队;在这种情况下,它将调度实体放在红黑树的最右端 */
void (*yield_task) (struct rq *rq);
bool (*yield_to_task) (struct rq *rq, struct task_struct *p, bool preempt);
/* 检查当前进程是否可被新进程抢占 */
void (*check_preempt_curr) (struct rq *rq, struct task_struct *p, int flags);
/*
* It is the responsibility of the pick_next_task() method that will
* return the next task to call put_prev_task() on the @prev task or
* something equivalent.
*
* May return RETRY_TASK when it finds a higher prio class has runnable
* tasks.
*/
/* 选择下一个应该要运行的进程运行 */
struct task_struct * (*pick_next_task) (struct rq *rq,
struct task_struct *prev);
/* 将进程放回运行队列 */
void (*put_prev_task) (struct rq *rq, struct task_struct *p);
#ifdef CONFIG_SMP
/* 为进程选择一个合适的CPU */
int (*select_task_rq)(struct task_struct *p, int task_cpu, int sd_flag, int flags);
/* 迁移任务到另一个CPU */
void (*migrate_task_rq)(struct task_struct *p);
/* 用于进程唤醒 */
void (*task_waking) (struct task_struct *task);
void (*task_woken) (struct rq *this_rq, struct task_struct *task);
/* 修改进程的CPU亲和力(affinity) */
void (*set_cpus_allowed)(struct task_struct *p,
const struct cpumask *newmask);
/* 启动运行队列 */
void (*rq_online)(struct rq *rq);
/* 禁止运行队列 */
void (*rq_offline)(struct rq *rq);
#endif
/* 当进程改变它的调度类或进程组时被调用 */
void (*set_curr_task) (struct rq *rq);
/* 该函数通常调用自 time tick 函数;它可能引起进程切换。这将驱动运行时(running)抢占 */
void (*task_tick) (struct rq *rq, struct task_struct *p, int queued);
/* 在进程创建时调用,不同调度策略的进程初始化不一样 */
void (*task_fork) (struct task_struct *p);
/* 在进程退出时会使用 */
void (*task_dead) (struct task_struct *p);
/*
* The switched_from() call is allowed to drop rq->lock, therefore we
* cannot assume the switched_from/switched_to pair is serliazed by
* rq->lock. They are however serialized by p->pi_lock.
*/
/* 用于进程切换 */
void (*switched_from) (struct rq *this_rq, struct task_struct *task);
void (*switched_to) (struct rq *this_rq, struct task_struct *task);
/* 改变优先级 */
void (*prio_changed) (struct rq *this_rq, struct task_struct *task,
int oldprio);
unsigned int (*get_rr_interval) (struct rq *rq,
struct task_struct *task);
void (*update_curr) (struct rq *rq);
#ifdef CONFIG_FAIR_GROUP_SCHED
void (*task_move_group) (struct task_struct *p);
#endif
};| 成员 | 描述 |
|---|---|
| enqueue_task | 向就绪队列中添加一个进程, 某个任务进入可运行状态时,该函数将得到调用。它将调度实体(进程)放入红黑树中,并对 nr_running 变量加 1 |
| dequeue_task | 将一个进程从就就绪队列中删除, 当某个任务退出可运行状态时调用该函数,它将从红黑树中去掉对应的调度实体,并从 nr_running 变量中减 1 |
| yield_task | 在进程想要资源放弃对处理器的控制权的时, 可使用在sched_yield系统调用, 会调用内核API yield_task完成此工作. compat_yield sysctl 关闭的情况下,该函数实际上执行先出队后入队;在这种情况下,它将调度实体放在红黑树的最右端 |
| check_preempt_curr | 该函数将检查当前运行的任务是否被抢占。在实际抢占正在运行的任务之前,CFS 调度程序模块将执行公平性测试。这将驱动唤醒式(wakeup)抢占 |
| pick_next_task | 该函数选择接下来要运行的最合适的进程 |
| put_prev_task | 用另一个进程代替当前运行的进程 |
| set_curr_task | 当任务修改其调度类或修改其任务组时,将调用这个函数 |
| task_tick | 在每次激活周期调度器时, 由周期性调度器调用, 该函数通常调用自 time tick 函数;它可能引起进程切换。这将驱动运行时(running)抢占 |
| task_new | 内核调度程序为调度模块提供了管理新任务启动的机会, 用于建立fork系统调用和调度器之间的关联, 每次新进程建立后, 则用new_task通知调度器, CFS 调度模块使用它进行组调度,而用于实时任务的调度模块则不会使用这个函数 |
对于各个调度器类, 都必须提供struct sched_class的一个实例, 目前内核中有实现以下五种:
// http://lxr.free-electrons.com/source/kernel/sched/sched.h?v=4.6#L1254
extern const struct sched_class stop_sched_class;
extern const struct sched_class dl_sched_class;
extern const struct sched_class rt_sched_class;
extern const struct sched_class fair_sched_class;
extern const struct sched_class idle_sched_class;| 调度器类 | 定义 | 描述 |
|---|---|---|
| stop_sched_class | kernel/sched/stop_task.c, line 112 | 优先级最高的线程,会中断所有其他线程,且不会被其他任务打断。作用: 1.发生在cpu_stop_cpu_callback 进行cpu之间任务migration; 2.HOTPLUG_CPU的情况下关闭任务。 |
| dl_sched_class | kernel/sched/deadline.c, line 1774 | |
| rt_sched_class | kernel/sched/rt.c, line 2326 | RT,作用:实时线程 |
| idle_sched_class | kernel/sched/idle_task.c, line 81 | 每个cup的第一个pid=0线程:swapper,是一个静态线程。调度类属于:idel_sched_class,所以在ps里面是看不到的。一般运行在开机过程和cpu异常的时候做dump |
| fair_sched_class | kernel/sched/fair.c, line 8521 | CFS(公平调度器),作用:一般常规线程 |
目前系統中,Scheduling Class的优先级顺序为
stop_sched_class -> dl_sched_class -> rt_sched_class -> fair_sched_class -> idle_sched_class开发者可以根据己的设计需求,來把所属的Task配置到不同的Scheduling Class中.
用户层应用程序无法直接与调度类交互, 他们只知道上下文定义的常量SCHED_XXX(用task_struct->policy表示), 这些常量提供了调度类之间的映射。
SCHED_NORMAL, SCHED_BATCH, SCHED_IDLE被映射到fair_sched_class
SCHED_RR和SCHED_FIFO则与rt_schedule_class相关联
3.3 就绪队列
就绪队列是核心调度器用于管理活动进程的主要数据结构。
各个·CPU都有自身的就绪队列,各个活动进程只出现在一个就绪队列中, 在多个CPU上同时运行一个进程是不可能的.
早期的内核中就绪队列是全局的, 即即有全局唯一的rq, 但是 在Linux-2.6内核时代,为了更好的支持多核,Linux调度器普遍采用了per-cpu的run queue,从而克服了多CPU系统中,全局唯一的run queue由于资源的竞争而成为了系统瓶颈的问题,因为在同一时刻,一个CPU访问run queue时,其他的CPU即使空闲也必须等待,大大降低了整体的CPU利用率和系统性能。当使用per-CPU的run queue之后,每个CPU不再使用大内核锁,从而大大提高了并行处理的调度能力。
就绪队列是全局调度器许多操作的起点, 但是进程并不是由就绪队列直接管理的, 调度管理是各个调度器的职责, 因此在各个就绪队列中嵌入了特定调度类的子就绪队列(cfs的顶级调度就队列 struct cfs_rq, 实时调度类的就绪队列struct rt_rq和deadline调度类的就绪队列struct dl_rq
每个CPU都有自己的 struct rq 结构,其用于描述在此CPU上所运行的所有进程,其包括一个实时进程队列和一个根CFS运行队列,在调度时,调度器首先会先去实时进程队列找是否有实时进程需要运行,如果没有才会去CFS运行队列找是否有进行需要运行,这就是为什么常说的实时进程优先级比普通进程高,不仅仅体现在prio优先级上,还体现在调度器的设计上,至于dl运行队列,我暂时还不知道有什么用处,其优先级比实时进程还高,但是创建进程时如果创建的是dl进程创建会错误(具体见sys_fork)。
3.3.1 CPU就绪队列struct rq
就绪队列用struct rq来表示, 其定义在kernel/sched/sched.h, line 566
/*每个处理器都会配置一个rq*/
struct rq {
/* runqueue lock: */
spinlock_t lock;
/*
* nr_running and cpu_load should be in the same cacheline because
* remote CPUs use both these fields when doing load calculation.
*/
/*用以记录目前处理器rq中执行task的数量*/
unsigned long nr_running;
#ifdef CONFIG_NUMA_BALANCING
unsigned int nr_numa_running;
unsigned int nr_preferred_running;
#endif
#define CPU_LOAD_IDX_MAX 5
/*用以表示处理器的负载,在每个处理器的rq中都会有对应到该处理器的cpu_load参数配置,
在每次处理器触发scheduler tick时,都会调用函数update_cpu_load_active,进行cpu_load的更新
在系统初始化的时候会调用函数sched_init把rq的cpu_load array初始化为0.
了解他的更新方式最好的方式是通过函数update_cpu_load,公式如下
cpu_load[0]会直接等待rq中load.weight的值。
cpu_load[1]=(cpu_load[1]*(2-1)+cpu_load[0])/2
cpu_load[2]=(cpu_load[2]*(4-1)+cpu_load[0])/4
cpu_load[3]=(cpu_load[3]*(8-1)+cpu_load[0])/8
cpu_load[4]=(cpu_load[4]*(16-1)+cpu_load[0]/16
调用函数this_cpu_load时,所返回的cpu load值是cpu_load[0]
而在进行cpu blance或migration时,就会呼叫函数
source_load target_load取得对该处理器cpu_load index值,
来进行计算*/
unsigned long cpu_load[CPU_LOAD_IDX_MAX];
unsigned long last_load_update_tick;
#ifdef CONFIG_NO_HZ_COMMON
u64 nohz_stamp;
unsigned long nohz_flags;
#endif
#ifdef CONFIG_NO_HZ_FULL
unsigned long last_sched_tick;
#endif
/* capture load from *all* tasks on this cpu: */
/*load->weight值,会是目前所执行的schedule entity的load->weight的总和
也就是说rq的load->weight越高,也表示所负责的排程单元load->weight总和越高
表示处理器所负荷的执行单元也越重*/
struct load_weight load;
/*在每次scheduler tick中呼叫update_cpu_load时,这个值就增加一,
可以用来反馈目前cpu load更新的次数*/
unsigned long nr_load_updates;
/*用来累加处理器进行context switch的次数,会在调用schedule时进行累加,
并可以通过函数nr_context_switches统计目前所有处理器总共的context switch次数
或是可以透过查看档案/proc/stat中的ctxt位得知目前整个系统触发context switch的次数*/
u64 nr_switches;
/*为cfs fair scheduling class 的rq就绪队列 */
struct cfs_rq cfs;
/*为real-time scheduling class 的rq就绪队列 */
struct rt_rq rt;
/* 为deadline scheduling class 的rq就绪队列 */
/* 用以支援可以group cfs tasks的机制*/
#ifdef CONFIG_FAIR_GROUP_SCHED
/* list of leaf cfs_rq on this cpu: */
/*
在有设置fair group scheduling 的环境下,
会基于原本cfs rq中包含有若干task的group所成的排程集合,
也就是说当有一个group a就会有自己的cfs rq用来排程自己所属的tasks,
而属于这group a的tasks所使用到的处理器时间就会以这group a总共所分的的时间为上限。
基于cgroup的fair group scheduling 架构,可以创造出有阶层性的task组织,
根据不同task的功能群组化在配置给该群主对应的处理器资源,
让属于该群主下的task可以透过rq机制使用该群主下的资源。
这个变数主要是管理CFS RQ list,
操作上可以透过函数list_add_leaf_cfs_rq把一个group cfs rq加入到list中,
或透过函数list_del_leaf_cfs_rq把一个group cfs rq移除,
并可以透过for_each_leaf_cfs_rq把一个rq上得所有leaf cfs_rq走一遍
*/
struct list_head leaf_cfs_rq_list;
#endif
/*
* This is part of a global counter where only the total sum
* over all CPUs matters. A task can increase this counter on
* one CPU and if it got migrated afterwards it may decrease
* it on another CPU. Always updated under the runqueue lock:
*/
/*一般来说,linux kernel 的task状态可以为
TASK_RUNNING, TASK_INTERRUPTIBLE(sleep), TASK_UNINTERRUPTIBLE(Deactivate Task),
此时Task会从rq中移除)或TASK_STOPPED.
透过这个变量会统计目前rq中有多少task属于TASK_UNINTERRUPTIBLE的状态。
当调用函数active_task时,会把nr_uninterruptible值减一,
并透过该函数enqueue_task把对应的task依据所在的scheduling class放在对应的rq中
并把目前rq中nr_running值加一 */
unsigned long nr_uninterruptible;
/*
curr:指向目前处理器正在执行的task;
idle:指向属于idle-task scheduling class 的idle task;
stop:指向目前最高等级属于stop-task scheduling class
的task; */
struct task_struct *curr, *idle;
/*
基于处理器的jiffies值,用以记录下次进行处理器balancing 的时间点*/
unsigned long next_balance;
/*
用以存储context-switch发生时,
前一个task的memory management结构并可用在函数finish_task_switch
透过函数mmdrop释放前一个task的结构体资源 */
struct mm_struct *prev_mm;
unsigned int clock_skip_update;
/* 用以记录目前rq的clock值,
基本上该值会等于通过sched_clock_cpu(cpu_of(rq))的返回值,
并会在每次调用scheduler_tick时通过函数update_rq_clock更新目前rq clock值。
函数sched_clock_cpu会通过sched_clock_local或ched_clock_remote取得
对应的sched_clock_data,而处理的sched_clock_data值,
会通过函数sched_clock_tick在每次调用scheduler_tick时进行更新;
*/
u64 clock;
u64 clock_task;
/*用以记录目前rq中有多少task处于等待i/o的sleep状态
在实际的使用上,例如当driver接受来自task的调用,
但处于等待i/o回复的阶段时,为了充分利用处理器的执行资源,
这时就可以在driver中调用函数io_schedule,
此时就会把目前rq中的nr_iowait加一,并设定目前task的io_wait为1
然后触发scheduling 让其他task有机会可以得到处理器执行时间*/
atomic_t nr_iowait;
#ifdef CONFIG_SMP
/*root domain是基于多核心架构下的机制,
会由rq结构记住目前采用的root domain,
其中包括了目前的cpu mask(包括span,online rt overload), reference count 跟cpupri
当root domain有被rq参考到时,refcount 就加一,反之就减一。
而cpumask span表示rq可挂上的cpu mask,noline为rq目前已经排程的
cpu mask cpu上执行real-time task.可以参考函数pull_rt_task,当一个rq中属于
real-time的task已经执行完毕,就会透过函数pull_rt_task从该
rq中属于rto_mask cpu mask 可以执行的处理器上,找出是否有一个处理器
有大于一个以上的real-time task,若有就会转到目前这个执行完成
real-time task 的处理器上
而cpupri不同于Task本身有区分140个(0-139)
Task Priority (0-99为RT Priority 而 100-139為Nice值 -20-19).
CPU Priority本身有102个Priority (包括,-1为Invalid,
0为Idle,1为Normal,2-101对应到到Real-Time Priority 0-99).
参考函数convert_prio, Task Priority如果是 140就会对应到
CPU Idle,如果是>=100就會对应到CPU Normal,
若是Task Priority介于0-99之间,就會对应到CPU Real-Time Priority 101-2之间.)
在实际的操作上,例如可以通过函数cpupri_find 传入入一个要插入的Real-Time Task,
此时就会依据cpupri中pri_to_cpu选择一个目前执行Real-Time Task
且该Task的优先级比目前要插入的Task更低的处理器,
并通过CPU Mask(lowest_mask)返回目前可以选择的处理器Mask.
可以參考kernel/sched_cpupri.c.
在初始化的过程中,通过函数sched_init调用函数init_defrootdomain,
对Root Domain和CPU Priority机制进行初始化.
*/
struct root_domain *rd;
/*Schedule Domain是基于多核心架构下的机制.
每个处理器都会有一个基础的Scheduling Domain,
Scheduling Domain可以通过parent找到上一层的Domain,
或是通过child找到下一层的 Domain (NULL表示結尾.).
也可以通过span字段,表示这个Domain所能覆盖的处理器的范围.
通常Base Domain会涵盖系統中所有处理器的个数,
而Child Domain所能涵盖的处理器个火速不超过它的Parent Domain.
而当进行Scheduling Domain 中的Task Balance,就会以该Domain所涵盖的处理器为最大范围.
同時,每个Schedule Domain都会包括一个或一个以上的
CPU Groups (结构为struct sched_group),并通过next字段把
CPU Groups链接在一起(成为一个单向的Circular linked list),
每个CPU Group都会有变量cpumask来定义CPU Group
可以参考Linux Kernel文件 Documentation/scheduler/sched-domains.txt.
*/
struct sched_domain *sd;
struct callback_head *balance_callback;
unsigned char idle_balance;
/* For active balancing */
int active_balance;
int push_cpu;
struct cpu_stop_work active_balance_work;
/* cpu of this runqueue: */
int cpu;
int online;
/*当RunQueue中此值为1,表示这个RunQueue正在进行
Fair Scheduling的Load Balance,此時会调用stop_one_cpu_nowait
暂停该RunQueue所出处理器调度,
并通过函数active_load_balance_cpu_stop,
把Tasks从最忙碌的处理器移到Idle的处理器器上执行. */
int active_balance;
/*用以存储目前进入Idle且负责进行Load Balance的处理器ID.
调用的流程为,在调用函数schedule时,
若该处理器RunQueue的nr_running為0 (也就是目前沒有
正在执行的Task),就会调用idle_balance,并触发Load Balance */
int push_cpu;
/* cpu of this runqueue: */
/*用以存储前运作这个RunQueue的处理器ID*/
int cpu;
/*为1表示目前此RunQueue有在对应的处理器上并执行 */
int online;
/*如果RunQueue中目前有Task正在执行,
这个值会等等于该RunQueue的Load Weight除以目前RunQueue中Task數目的均值.
(rq->avg_load_per_task = rq->load.weight / nr_running;).*/
unsigned long avg_load_per_task;
/*这个值会由Real-Time Scheduling Class调用函数update_curr_rt,
用以统计目前Real-Time Task执行时间的均值,
在这个函数中会以目前RunQueue的clock_task减去目前Task执行的起始时间,
取得执行时间的Delta值. (delta_exec = rq->clock_task – curr->se.exec_start; ).
在通过函数sched_rt_avg_update把这个Delta值跟原本RunQueue中的rt_avg值取平均值.
以运行的周期来看,这个值可反应目前系統中Real-Time Task平均被分配到的执行时间值 .*/
u64 rt_avg;
/* 这个值主要在函数sched_avg_update更新 */
u64 age_stamp;
/*這值会在处理Scheduling時,若判断目前处理器runQueue沒有正在运行的Task,
就会通过函数idle_balance更新这个值为目前RunQueue的clock值.
可用以表示這個处理器何時进入到Idle的状态 */
u64 idle_stamp;
/*会在有Task运行且idle_stamp不为0 (表示前一个转台是在Idle)时
以目前RunQueue的clock减去idle_stmp所计算出的Delta值为依据,
更新这个值, 可反应目前处理器进入Idle状态的时间长短 */
u64 avg_idle;
/* This is used to determine avg_idle's max value */
u64 max_idle_balance_cost;
#endif
#ifdef CONFIG_IRQ_TIME_ACCOUNTING
u64 prev_irq_time;
endif
#ifdef CONFIG_PARAVIRT
u64 prev_steal_time;
#endif
#ifdef CONFIG_PARAVIRT_TIME_ACCOUNTING
u64 prev_steal_time_rq;
#endif
/* calc_load related fields */
/*用以记录下一次计算CPU Load的时间,
初始值为目前的jiffies加上五秒与1次的Scheduling Tick的间隔
(=jiffies + LOAD_FREQ,且LOAD_FREQ=(5*HZ+1))*
/
unsigned long calc_load_update;
/*等于RunQueue中nr_running与nr_uninterruptible的总和.
(可參考函式calc_load_fold_active).*/
long calc_load_active;
#ifdef CONFIG_SCHED_HRTICK
#ifdef CONFIG_SMP
int hrtick_csd_pending;
/*在函数it_rq_hrtick初始化RunQueue High-Resolution
Tick时, 此值设为0.
在函数hrtick_start中,会判断目前触发的RunQueue跟目前处理器所使用的RunQueue是否一致,
若是,就直接呼叫函数hrtimer_restart,反之就会依据RunQueue中hrtick_csd_pending的值,
如果hrtick_csd_pending為0,就会通过函数__smp_call_function_single让RunQueue所在的另一個
处理器执行rq->hrtick_csd.func和函数 __hrtick_start.
并等待该处理器執行完毕后,才重新把hrtick_csd_pending设定为1.
也就是说, RunQueue的hrtick_csd_pending是用来作为SMP架构下,
由处理器A触发处理器B执行*/
struct call_single_data hrtick_csd;
#endif
/*为gh-Resolution Tick的结构,会通过htimer_init初始化.*/
struct hrtimer hrtick_timer;
#endif
#ifdef CONFIG_SCHEDSTATS
/* latency stats */
/*為Scheduling Info.的統計結構,可以參考
include/linux/sched.h中的宣告. 例如在每次觸發
Schedule時,呼叫函式schedule_debug對上一個Task
的lock_depth進行確認(Fork一個新的Process 時,
會把此值預設為-1就是No-Lock,當呼叫
Kernel Lock時, 就會把Current Task的lock_depth加一.),
若lock_depth>=0,就會累加Scheduling Info.的bkl_count值,
用以代表Task Blocking的次數.*/
struct sched_info rq_sched_info;
/*可用以表示RunQueue中的Task所得到CPU執行
時間的累加值.
在發生Task Switch時,會透過sched_info_switch呼叫
sched_info_arrive並以目前RunQueue Clock值更新
Task 的sched_info.last_arrival時間,而在Task所分配時間
結束後,會在函式sched_info_depart中以現在的
RunQueue Clock值減去Task的sched_info.last_arrival
時間值,得到的 Delta作為變數rq_cpu_time的累
加值.*/
unsigned long long rq_cpu_time;
/* could above be rq->cfs_rq.exec_clock + rq->rt_rq.rt_runtime ? */
/* sys_sched_yield() stats */
/*用以統計呼叫System Call sys_sched_yield的次數.*/
unsigned int yld_count;
/* schedule() stats */
/*可用以統計觸發Scheduling的次數. 在每次觸發
Scheduling時,會透過函式schedule呼叫schedule_debug,
呼叫schedstat_inc對這變數進行累加.*/
unsigned int sched_count;
/*可用以統計進入到Idle Task的次數. 會在函式
pick_next_task_idle中,呼叫schedstat_inc對這變數進行
累加.*/
unsigned int sched_goidle;
/* try_to_wake_up() stats */
/*用以統計Wake Up Task的次數.*/
unsigned int ttwu_count;
/*用以統計Wake Up 同一個處理器Task的次數.*/
unsigned int ttwu_local;
/* BKL stats */
unsigned int bkl_count;
#endif
#ifdef CONFIG_SMP
struct llist_head wake_list;
#endif
#ifdef CONFIG_CPU_IDLE
/* Must be inspected within a rcu lock section */
struct cpuidle_state *idle_state;
#endif
};
| 字段 | 描述 |
|---|---|
| nr_running | 队列上可运行进程的数目, 不考虑优先级和调度类 |
| load | 提供了就绪队列当前负荷的度量, 队列的符合本质上与队列上当前活动进程的数目成正比, 其中的各个进程又有优先级作为权重. 每个就绪队列的虚拟时钟的速度等于该信息 |
| cpu_load | 用于跟踪此前的负荷状态 |
| cfs,rt 和dl | 嵌入的子就绪队列, 分别用于完全公平调度器, 实时调度器和deadline调度器 |
| curr | 当前运行的进程的task_struct实例 |
| idle | 指向空闲进程的task_struct实例 |
| clock | 就绪队列自身的时钟 |
系统中所有的就绪队列都在runqueues数组中, 该数组的每个元素分别对应于系统中的一个CPU, 如果是单处理器系统只有一个就绪队列, 则数组就只有一个元素
内核中也提供了一些宏, 用来获取cpu上的就绪队列的信息
// http://lxr.free-electrons.com/source/kernel/sched/sched.h?v=4.6#L716
DECLARE_PER_CPU_SHARED_ALIGNED(struct rq, runqueues);
#define cpu_rq(cpu) (&per_cpu(runqueues, (cpu)))
#define this_rq() this_cpu_ptr(&runqueues)
#define task_rq(p) cpu_rq(task_cpu(p))
#define cpu_curr(cpu) (cpu_rq(cpu)->curr)
#define raw_rq() raw_cpu_ptr(&runqueues)3.3.2 CFS公平调度器的就绪队列cfs_rq
在系统中至少有一个CFS运行队列,其就是根CFS运行队列,而其他的进程组和进程都包含在此运行队列中,不同的是进程组又有它自己的CFS运行队列,其运行队列中包含的是此进程组中的所有进程。当调度器从根CFS运行队列中选择了一个进程组进行调度时,进程组会从自己的CFS运行队列中选择一个调度实体进行调度(这个调度实体可能为进程,也可能又是一个子进程组),就这样一直深入,直到最后选出一个进程进行运行为止
对于 struct cfs_rq 结构没有什么好说明的,只要确定其代表着一个CFS运行队列,并且包含有一个红黑树进行选择调度进程即可。
/* CFS-related fields in a runqueue */
/* CFS调度的运行队列,每个CPU的rq会包含一个cfs_rq,而每个组调度的sched_entity也会有自己的一个cfs_rq队列 */
struct cfs_rq {
/* CFS运行队列中所有进程的总负载 */
struct load_weight load;
/*
* nr_running: cfs_rq中调度实体数量
* h_nr_running: 只对进程组有效,其下所有进程组中cfs_rq的nr_running之和
*/
unsigned int nr_running, h_nr_running;
u64 exec_clock;
/*
* 当前CFS队列上最小运行时间,单调递增
* 两种情况下更新该值:
* 1、更新当前运行任务的累计运行时间时
* 2、当任务从队列删除去,如任务睡眠或退出,这时候会查看剩下的任务的vruntime是否大于min_vruntime,如果是则更新该值。
*/
u64 min_vruntime;
#ifndef CONFIG_64BIT
u64 min_vruntime_copy;
#endif
/* 该红黑树的root */
struct rb_root tasks_timeline;
/* 下一个调度结点(红黑树最左边结点,最左边结点就是下个调度实体) */
struct rb_node *rb_leftmost;
/*
* 'curr' points to currently running entity on this cfs_rq.
* It is set to NULL otherwise (i.e when none are currently running).
* curr: 当前正在运行的sched_entity(对于组虽然它不会在cpu上运行,但是当它的下层有一个task在cpu上运行,那么它所在的cfs_rq就把它当做是该cfs_rq上当前正在运行的sched_entity)
* next: 表示有些进程急需运行,即使不遵从CFS调度也必须运行它,调度时会检查是否next需要调度,有就调度next
*
* skip: 略过进程(不会选择skip指定的进程调度)
*/
struct sched_entity *curr, *next, *last, *skip;
#ifdef CONFIG_SCHED_DEBUG
unsigned int nr_spread_over;
#endif
#ifdef CONFIG_SMP
/*
* CFS load tracking
*/
struct sched_avg avg;
u64 runnable_load_sum;
unsigned long runnable_load_avg;
#ifdef CONFIG_FAIR_GROUP_SCHED
unsigned long tg_load_avg_contrib;
#endif
atomic_long_t removed_load_avg, removed_util_avg;
#ifndef CONFIG_64BIT
u64 load_last_update_time_copy;
#endif
#ifdef CONFIG_FAIR_GROUP_SCHED
/*
* h_load = weight * f(tg)
*
* Where f(tg) is the recursive weight fraction assigned to
* this group.
*/
unsigned long h_load;
u64 last_h_load_update;
struct sched_entity *h_load_next;
#endif /* CONFIG_FAIR_GROUP_SCHED */
#endif /* CONFIG_SMP */
#ifdef CONFIG_FAIR_GROUP_SCHED
/* 所属于的CPU rq */
struct rq *rq; /* cpu runqueue to which this cfs_rq is attached */
/*
* leaf cfs_rqs are those that hold tasks (lowest schedulable entity in
* a hierarchy). Non-leaf lrqs hold other higher schedulable entities
* (like users, containers etc.)
*
* leaf_cfs_rq_list ties together list of leaf cfs_rq's in a cpu. This
* list is used during load balance.
*/
int on_list;
struct list_head leaf_cfs_rq_list;
/* 拥有该CFS运行队列的进程组 */
struct task_group *tg; /* group that "owns" this runqueue */
#ifdef CONFIG_CFS_BANDWIDTH
int runtime_enabled;
u64 runtime_expires;
s64 runtime_remaining;
u64 throttled_clock, throttled_clock_task;
u64 throttled_clock_task_time;
int throttled, throttle_count;
struct list_head throttled_list;
#endif /* CONFIG_CFS_BANDWIDTH */
#endif /* CONFIG_FAIR_GROUP_SCHED */
};3.3.3 实时进程就绪队列rt_rq
/* Real-Time classes' related field in a runqueue: */
struct rt_rq {
struct rt_prio_array active;
unsigned int rt_nr_running;
unsigned int rr_nr_running;
#if defined CONFIG_SMP || defined CONFIG_RT_GROUP_SCHED
struct {
int curr; /* highest queued rt task prio */
#ifdef CONFIG_SMP
int next; /* next highest */
#endif
} highest_prio;
#endif
#ifdef CONFIG_SMP
unsigned long rt_nr_migratory;
unsigned long rt_nr_total;
int overloaded;
struct plist_head pushable_tasks;
#ifdef HAVE_RT_PUSH_IPI
int push_flags;
int push_cpu;
struct irq_work push_work;
raw_spinlock_t push_lock;
#endif
#endif /* CONFIG_SMP */
int rt_queued;
int rt_throttled;
u64 rt_time;
u64 rt_runtime;
/* Nests inside the rq lock: */
raw_spinlock_t rt_runtime_lock;
#ifdef CONFIG_RT_GROUP_SCHED
unsigned long rt_nr_boosted;
struct rq *rq;
struct task_group *tg;
#endif
};3.3.4 deadline就绪队列dl_rq
/* Deadline class' related fields in a runqueue */
struct dl_rq {
/* runqueue is an rbtree, ordered by deadline */
struct rb_root rb_root;
struct rb_node *rb_leftmost;
unsigned long dl_nr_running;
#ifdef CONFIG_SMP
/*
* Deadline values of the currently executing and the
* earliest ready task on this rq. Caching these facilitates
* the decision wether or not a ready but not running task
* should migrate somewhere else.
*/
struct {
u64 curr;
u64 next;
} earliest_dl;
unsigned long dl_nr_migratory;
int overloaded;
/*
* Tasks on this rq that can be pushed away. They are kept in
* an rb-tree, ordered by tasks' deadlines, with caching
* of the leftmost (earliest deadline) element.
*/
struct rb_root pushable_dl_tasks_root;
struct rb_node *pushable_dl_tasks_leftmost;
#else
struct dl_bw dl_bw;
#endif
};3.4 调度实体
我们前面提到, 调度器不限于调度进程, 还可以调度更大的实体, 比如实现组调度: 可用的CPUI时间首先在一半的进程组(比如, 所有进程按照所有者分组)之间分配, 接下来分配的时间再在组内进行二次分配.
这种一般性要求调度器不直接操作进程, 而是处理可调度实体, 因此需要一个通用的数据结构描述这个调度实体,即seched_entity结构, 其实际上就代表了一个调度对象,可以为一个进程,也可以为一个进程组。对于根的红黑树而言,一个进程组就相当于一个调度实体,一个进程也相当于一个调度实体。
我们可以先看看sched_entity结构,其定义在include/linux/sched.h, 如下:
3.4.1 sched_entity调度实体
/* 一个调度实体(红黑树的一个结点),其包含一组或一个指定的进程,包含一个自己的运行队列,一个父亲指针,一个指向需要调度的运行队列指针 */
struct sched_entity {
/* 权重,在数组prio_to_weight[]包含优先级转权重的数值 */
struct load_weight load; /* for load-balancing */
/* 实体在红黑树对应的结点信息 */
struct rb_node run_node;
/* 实体所在的进程组 */
struct list_head group_node;
/* 实体是否处于红黑树运行队列中 */
unsigned int on_rq;
/* 开始运行时间 */
u64 exec_start;
/* 总运行时间 */
u64 sum_exec_runtime;
/* 虚拟运行时间,在时间中断或者任务状态发生改变时会更新
* 其会不停增长,增长速度与load权重成反比,load越高,增长速度越慢,就越可能处于红黑树最左边被调度
* 每次时钟中断都会修改其值
* 具体见calc_delta_fair()函数
*/
u64 vruntime;
/* 进程在切换进CPU时的sum_exec_runtime值 */
u64 prev_sum_exec_runtime;
/* 此调度实体中进程移到其他CPU组的数量 */
u64 nr_migrations;
#ifdef CONFIG_SCHEDSTATS
/* 用于统计一些数据 */
struct sched_statistics statistics;
#endif
#ifdef CONFIG_FAIR_GROUP_SCHED
/* 代表此进程组的深度,每个进程组都比其parent调度组深度大1 */
int depth;
/* 父亲调度实体指针,如果是进程则指向其运行队列的调度实体,如果是进程组则指向其上一个进程组的调度实体
* 在 set_task_rq 函数中设置
*/
struct sched_entity *parent;
/* 实体所处红黑树运行队列 */
struct cfs_rq *cfs_rq;
/* 实体的红黑树运行队列,如果为NULL表明其是一个进程,若非NULL表明其是调度组 */
struct cfs_rq *my_q;
#endif
#ifdef CONFIG_SMP
/*
* Per entity load average tracking.
*
* Put into separate cache line so it does not
* collide with read-mostly values above.
*/
struct sched_avg avg ____cacheline_aligned_in_smp;
#endif
};在struct sched_entity结构中,值得我们注意的成员是
| 字段 | 描述 |
|---|---|
| load | 指定了权重, 决定了各个实体占队列总负荷的比重, 计算负荷权重是调度器的一项重任, 因为CFS所需的虚拟时钟的速度最终依赖于负荷, 权重通过优先级转换而成,是vruntime计算的关键 |
| run_node | 调度实体在红黑树对应的结点信息, 使得调度实体可以在红黑树上排序 |
| sum_exec_runtime | 记录程序运行所消耗的CPU时间, 以用于完全公平调度器CFS |
| on_rq | 调度实体是否在就绪队列上接受检查, 表明是否处于CFS红黑树运行队列中,需要明确一个观点就是,CFS运行队列里面包含有一个红黑树,但这个红黑树并不是CFS运行队列的全部,因为红黑树仅仅是用于选择出下一个调度程序的算法。很简单的一个例子,普通程序运行时,其并不在红黑树中,但是还是处于CFS运行队列中,其on_rq为真。只有准备退出、即将睡眠等待和转为实时进程的进程其CFS运行队列的on_rq为假 |
| vruntime | 虚拟运行时间,调度的关键,其计算公式:一次调度间隔的虚拟运行时间 = 实际运行时间 * (NICE_0_LOAD / 权重)。可以看出跟实际运行时间和权重有关,红黑树就是以此作为排序的标准,优先级越高的进程在运行时其vruntime增长的越慢,其可运行时间相对就长,而且也越有可能处于红黑树的最左结点,调度器每次都选择最左边的结点为下一个调度进程。注意其值为单调递增,在每个调度器的时钟中断时当前进程的虚拟运行时间都会累加。单纯的说就是进程们都在比谁的vruntime最小,最小的将被调度 |
| cfs_rq | 此调度实体所处于的CFS运行队列 |
| my_q | 如果此调度实体代表的是一个进程组,那么此调度实体就包含有一个自己的CFS运行队列,其CFS运行队列中存放的是此进程组中的进程,这些进程就不会在其他CFS运行队列的红黑树中被包含(包括顶层红黑树也不会包含他们,他们只属于这个进程组的红黑树) |
* 在进程运行时, 我们需要记录消耗的CPU时间, 以用于完全公平调度器. sum_exec_runtime就用于该目的.
跟踪运行时间是由update_curr不断累积完成的. 内核中许多地方都会调用该函数, 例如, 新进程加入就绪队列时, 或者周期性调度器中. 每次调用时, 会计算当前时间和exec_start之间的差值, exec_start则更新到当前时间. 差值则被加到sum_exec_runtime.
在进程执行期间虚拟时钟上流逝的时间数量由vruntime统计
在进程被撤销时, 其当前sum_exec_runtime值保存到prev_sum_exec_runtime, 此后, 进程抢占的时候需要用到该数据, 但是注意, 在prev_sum_exec_runtime中保存了sum_exec_runtime的值, 而sum_exec_runtime并不会被重置, 而是持续单调增长
每个进程的task_struct中都嵌入了sched_entity对象, 所以进程是可调度的实体, 但是请注意, 其逆命一般是不正确的, 即可调度的实体不一定是进程.
对于怎么理解一个进程组有它自己的CFS运行队列,其实很好理解,比如在根CFS运行队列的红黑树上有一个进程A一个进程组B,各占50%的CPU,对于根的红黑树而言,他们就是两个调度实体。调度器调度的不是进程A就是进程组B,而如果调度到进程组B,进程组B自己选择一个程序交给CPU运行就可以了,而进程组B怎么选择一个程序给CPU,就是通过自己的CFS运行队列的红黑树选择,如果进程组B还有个子进程组C,原理都一样,就是一个层次结构。
3.4.2 实时进程调度实体sched_rt_entity
其定义在include/linux/sched.h, 如下:
struct sched_rt_entity {
struct list_head run_list;
unsigned long timeout;
unsigned long watchdog_stamp;
unsigned int time_slice;
unsigned short on_rq;
unsigned short on_list;
struct sched_rt_entity *back;
#ifdef CONFIG_RT_GROUP_SCHED
struct sched_rt_entity *parent;
/* rq on which this entity is (to be) queued: */
struct rt_rq *rt_rq;
/* rq "owned" by this entity/group: */
struct rt_rq *my_q;
#endif
};3.4.3 EDF调度实体sched_dl_entity
其定义在include/linux/sched.h, 如下:
struct sched_dl_entity {
struct rb_node rb_node;
/*
* Original scheduling parameters. Copied here from sched_attr
* during sched_setattr(), they will remain the same until
* the next sched_setattr().
*/
u64 dl_runtime; /* maximum runtime for each instance */
u64 dl_deadline; /* relative deadline of each instance */
u64 dl_period; /* separation of two instances (period) */
u64 dl_bw; /* dl_runtime / dl_deadline */
/*
* Actual scheduling parameters. Initialized with the values above,
* they are continously updated during task execution. Note that
* the remaining runtime could be < 0 in case we are in overrun.
*/
s64 runtime; /* remaining runtime for this instance */
u64 deadline; /* absolute deadline for this instance */
unsigned int flags; /* specifying the scheduler behaviour */
/*
* Some bool flags:
*
* @dl_throttled tells if we exhausted the runtime. If so, the
* task has to wait for a replenishment to be performed at the
* next firing of dl_timer.
*
* @dl_boosted tells if we are boosted due to DI. If so we are
* outside bandwidth enforcement mechanism (but only until we
* exit the critical section);
*
* @dl_yielded tells if task gave up the cpu before consuming
* all its available runtime during the last job.
*/
int dl_throttled, dl_boosted, dl_yielded;
/*
* Bandwidth enforcement timer. Each -deadline task has its
* own bandwidth to be enforced, thus we need one timer per task.
*/
struct hrtimer dl_timer;
};3.5 组调度(struct task_group)
我们知道,linux是一个多用户系统,如果有两个进程分别属于两个用户,而进程的优先级不同,会导致两个用户所占用的CPU时间不同,这样显然是不公平的(如果优先级差距很大,低优先级进程所属用户使用CPU的时间就很小),所以内核引入组调度。如果基于用户分组,即使进程优先级不同,这两个用户使用的CPU时间都为50%。
如果task_group中的运行时间还没有使用完,而当前进程运行时间使用完后,会调度task_group中的下一个被调度进程;相反,如果task_group的运行时间使用结束,则调用上一层的下一个被调度进程。需要注意的是,一个组调度中可能会有一部分是实时进程,一部分是普通进程,这也导致这种组要能够满足即能在实时调度中进行调度,又可以在CFS调度中进行调度。
linux可以以以下两种方式进行进程的分组:
用户ID:按照进程的USER ID进行分组,在对应的/sys/kernel/uid/目录下会生成一个cpu.share的文件,可以通过配置该文件来配置用户所占CPU时间比例。
cgourp(control group):生成组用于限制其所有进程,比如我生成一个组(生成后此组为空,里面没有进程),设置其CPU使用率为10%,并把一个进程丢进这个组中,那么这个进程最多只能使用CPU的10%,如果我们将多个进程丢进这个组,这个组的所有进程平分这个10%。
注意的是,这里的进程组概念和fork调用所产生的父子进程组概念不一样,文章所使用的进程组概念全为组调度中进程组的概念。为了管理组调度,内核引进了struct task_group结构
其定义在kernel/sched/sched.h?v=4.6#L240, 如下:
/* task group related information */
struct task_group {
struct cgroup_subsys_state css;
#ifdef CONFIG_FAIR_GROUP_SCHED
/* schedulable entities of this group on each cpu */
struct sched_entity **se;
/* runqueue "owned" by this group on each cpu */
struct cfs_rq **cfs_rq;
unsigned long shares;
#ifdef CONFIG_SMP
/*
* load_avg can be heavily contended at clock tick time, so put
* it in its own cacheline separated from the fields above which
* will also be accessed at each tick.
*/
atomic_long_t load_avg ____cacheline_aligned;
#endif
#endif
#ifdef CONFIG_RT_GROUP_SCHED
struct sched_rt_entity **rt_se;
struct rt_rq **rt_rq;
struct rt_bandwidth rt_bandwidth;
#endif
struct rcu_head rcu;
struct list_head list;
struct task_group *parent;
struct list_head siblings;
struct list_head children;
#ifdef CONFIG_SCHED_AUTOGROUP
struct autogroup *autogroup;
#endif
struct cfs_bandwidth cfs_bandwidth;
};在struct task_group结构中,最重要的成员为 struct sched_entity * se 和 struct cfs_rq * cfs_rq。
在多核多CPU的情况下,同一进程组的进程有可能在不同CPU上同时运行,所以每个进程组都必须对每个CPU分配它的调度实体(struct sched_entity 和 struct sched_rt_entity)和运行队列(struct cfs_rq 和 struct rt_rq)。
4 总结
进程调度器的框架如下图所示
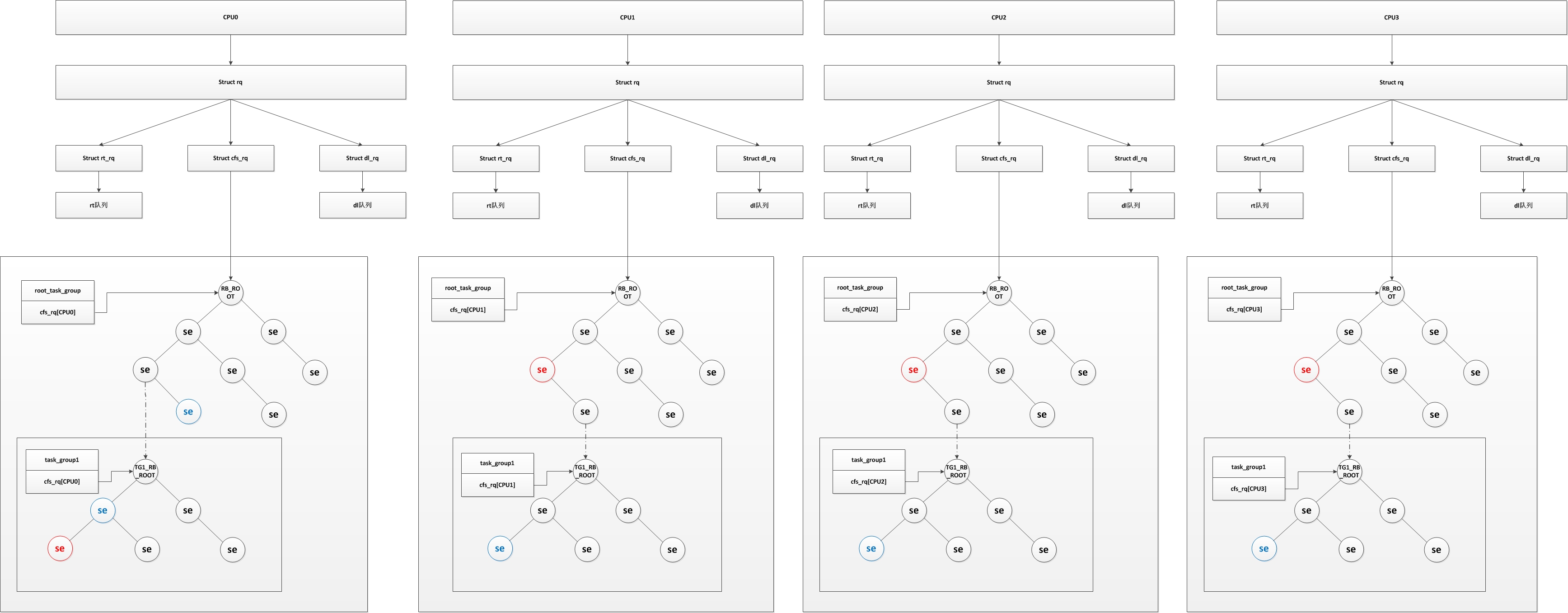
从图中可以看出来,每个CPU对应包含一个运行队列结构(struct rq),而每个运行队列又包含有其自己的实时进程运行队列(struct rt_rq)、普通进程运行队列(struct cfs_rq)、和deadline实时调度的运行队列(struct dl_rq),也就是说每个CPU都有他们自己的实时进程运行队列及普通进程运行队列
为了方便,我们在图中只描述普通进程的组织结构(最复杂的也是普通进程的组织结构),而红色se则为当前CPU上正在执行的程序,蓝色为下个将要执行的程序,其实图中并不规范,实际上当进程运行时,会从红黑树中剥离出来,然后设定下一个调度进程,当进程运行时间结束时,再重新放入红黑树中。而为什么CPU0上有两个蓝色将被调度进程,将在组调度中解释。而为什么红黑树中又有一个子红黑树,我们将在调度实体中解释。
通过的调度策略对象–调度类
linux下每个进程都由自身所属的调度类进行管理, sched_class结构体表示调度类, 调度类提供了通用调度器和各个调度器之间的关联, 调度器类和特定数据结构中汇集地几个函数指针表示, 全局调度器请求的各个操作都可以用一个指针表示, 这使得无需了解调度器类的内部工作原理即可创建通用调度器, 定义在kernel/sched/sched.h
开发者可以根据己的设计需求,來把所属的Task配置到不同的Scheduling Class中.
用户层应用程序无法直接与调度类交互, 他们只知道上下文定义的常量SCHED_XXX(用task_struct->policy表示), 这些常量提供了调度类之间的映射。
目前系統中,Scheduling Class的优先级顺序为
stop_sched_class -> dl_sched_class -> rt_sched_class -> fair_sched_class -> idle_sched_class被调度的实体–进程或者进程组
linux下被调度的不只是进程, 还可以是进程组. 因此需要一种更加通用的形式组织被调度数据结构, 即调度实体, 同样不同的进程用不同的调度实体表示
| 普通进程 | 实时进程 |
|---|---|
| sched_entity | rt_entity, sched_dl_entity |
用就绪队列保存和组织调度进程
所有的就绪进程(TASK_RUNNING)都被组织在就绪队列, 也叫运行队列中, 每个CPU对应包含一个运行队列结构(struct rq),而每个运行队列又嵌入了有其自己的实时进程运行队列(struct rt_rq)、普通进程运行队列(struct cfs_rq)、和EDF实时调度的运行队列(struct dl_rq),也就是说每个CPU都有他们自己的实时进程运行队列及普通进程运行队列
| 全局 | 普通进程 | 实时进程 |
|---|---|---|
| rq | cfs_rq | rt_rq, dl_rq |

















 2911
2911

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









