







海思hi3536 usb摄像头驱动配置
Linux系统自带了usb摄像头驱动,在Linux系统中简称uvc驱动,有些系统中默认可能没有配置该驱动,或者需要进行裁剪,这个时候需要自己手动进行配置。配置过程如下:
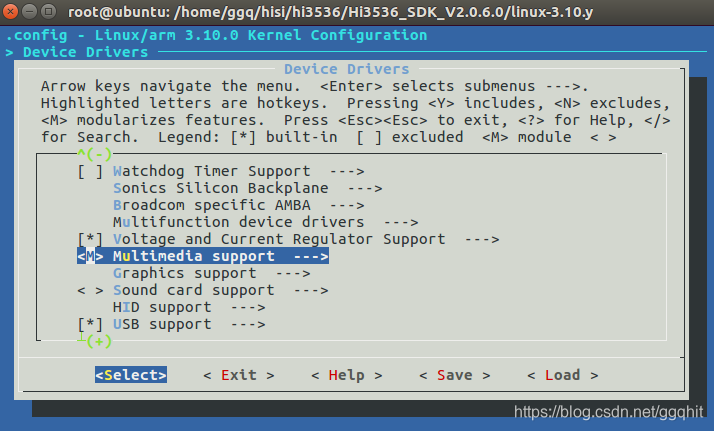
- 在Device Drivers选项下选择Multimedia support
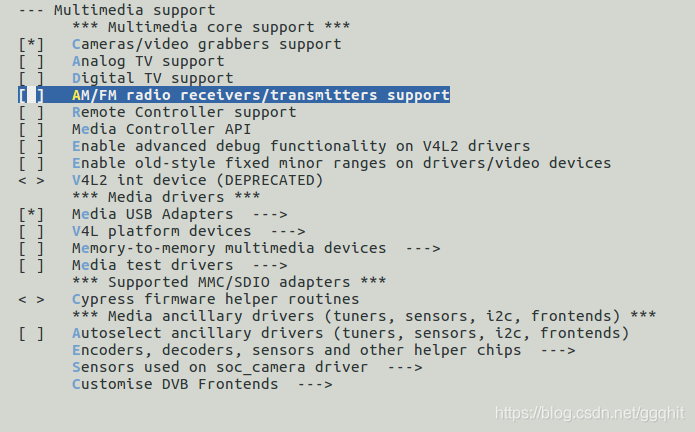
- 进入Multimedia support选项,选择Cameras/video grabbers support
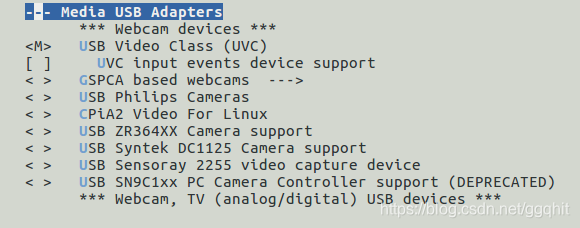
- 进入Media USB Adapters选项,选中USB Video Class (UVC),可以根据实际需要将该模块编译进内核或者编程成ko文件。
上述步骤完成后可以编译出以下模块,然后用insmod命令加载模块:
insmod videodev.ko
insmod videobuf2-memops.ko
insmod videobuf2-vmalloc.ko
insmod videobuf2-core.ko
insmod uvcvideo.ko
加载成功后,会在板子上/dev目录下生成videoxx节点。然后就可以用Linux下v4l2那套接口采集视频。
下面附一段v4l2采集的demon程序。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <getopt.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <malloc.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/mman.h>
#include <sys/ioctl.h>
#include <asm/types.h>
#include <linux/videodev2.h>
#define CAMERA_DEVICE "/dev/video0"
#define CAPTURE_FILE "frame.jpg"
#define VIDEO_WIDTH 640
#define VIDEO_HEIGHT 480
#define VIDEO_FORMAT V4L2_PIX_FMT_YUYV
#define BUFFER_COUNT 4
typedef struct VideoBuffer {
void *start;
size_t length;
} VideoBuffer;
VideoBuffer framebuf[10];
int main()
{
int i, ret;
// 打开设备
int fd;
fd = open(CAMERA_DEVICE, O_RDWR, 0);
if (fd < 0) {
printf("Open %s failed\n", CAMERA_DEVICE);
return -1;
}
// 获取驱动信息
struct v4l2_capability cap;
ret = ioctl(fd, VIDIOC_QUERYCAP, &cap);
if (ret < 0) {
printf("VIDIOC_QUERYCAP failed (%d)\n", ret);
return ret;
}
// Print capability infomations
printf("Capability Informations:\n");
printf(" driver: %s\n", cap.driver);
printf(" card: %s\n", cap.card);
printf(" bus_info: %s\n", cap.bus_info);
printf(" version: %08X\n", cap.version);
printf(" capabilities: %08X\n", cap.capabilities);
// 设置视频格式
struct v4l2_format fmt;
memset(&fmt, 0, sizeof(fmt));
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = VIDEO_WIDTH;
fmt.fmt.pix.height = VIDEO_HEIGHT;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
ret = ioctl(fd, VIDIOC_S_FMT, &fmt);
if (ret < 0) {
printf("VIDIOC_S_FMT failed (%d)\n", ret);
return ret;
}
// 获取视频格式
ret = ioctl(fd, VIDIOC_G_FMT, &fmt);
if (ret < 0) {
printf("VIDIOC_G_FMT failed (%d)\n", ret);
return ret;
}
// Print Stream Format
printf("Stream Format Informations:\n");
printf(" type: %d\n", fmt.type);
printf(" width: %d\n", fmt.fmt.pix.width);
printf(" height: %d\n", fmt.fmt.pix.height);
char fmtstr[8];
memset(fmtstr, 0, 8);
memcpy(fmtstr, &fmt.fmt.pix.pixelformat, 4);
printf(" pixelformat: %s\n", fmtstr);
printf(" field: %d\n", fmt.fmt.pix.field);
printf(" bytesperline: %d\n", fmt.fmt.pix.bytesperline);
printf(" sizeimage: %d\n", fmt.fmt.pix.sizeimage);
printf(" colorspace: %d\n", fmt.fmt.pix.colorspace);
printf(" priv: %d\n", fmt.fmt.pix.priv);
printf(" raw_date: %s\n", fmt.fmt.raw_data);
// 请求分配内存
struct v4l2_requestbuffers reqbuf;
reqbuf.count = BUFFER_COUNT;
reqbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuf.memory = V4L2_MEMORY_MMAP;
ret = ioctl(fd , VIDIOC_REQBUFS, &reqbuf);
if(ret < 0) {
printf("VIDIOC_REQBUFS failed (%d)\n", ret);
return ret;
}
// 获取空间
VideoBuffer* buffers = calloc( reqbuf.count, sizeof(*buffers) );
struct v4l2_buffer buf;
for (i = 0; i < reqbuf.count; i++)
{
buf.index = i;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
ret = ioctl(fd , VIDIOC_QUERYBUF, &buf);
if(ret < 0) {
printf("VIDIOC_QUERYBUF (%d) failed (%d)\n", i, ret);
return ret;
}
// mmap buffer
framebuf[i].length = buf.length;
framebuf[i].start = (char *) mmap(0, buf.length, PROT_READ|PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
if (framebuf[i].start == MAP_FAILED) {
printf("mmap (%d) failed: %s\n", i, strerror(errno));
return -1;
}
// Queen buffer
ret = ioctl(fd , VIDIOC_QBUF, &buf);
if (ret < 0) {
printf("VIDIOC_QBUF (%d) failed (%d)\n", i, ret);
return -1;
}
printf("Frame buffer %d: address=0x%x, length=%d\n", i, (unsigned int)framebuf[i].start, framebuf[i].length);
}
// 开始录制
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ret = ioctl(fd, VIDIOC_STREAMON, &type);
if (ret < 0) {
printf("VIDIOC_STREAMON failed (%d)\n", ret);
return ret;
}
// Process the frame
FILE *fp = fopen(CAPTURE_FILE, "wb");
if (fp < 0) {
printf("open frame data file failed\n");
return -1;
}
int cnt = 100;
while(cnt--)
{
// Get frame
ret = ioctl(fd, VIDIOC_DQBUF, &buf);
if (ret < 0) {
printf("VIDIOC_DQBUF failed (%d)\n", ret);
return ret;
}
fwrite(framebuf[buf.index].start, 1, buf.length, fp);
printf("Capture one frame saved in %s\n", CAPTURE_FILE);
// Re-queen buffer
ret = ioctl(fd, VIDIOC_QBUF, &buf);
if (ret < 0) {
printf("VIDIOC_QBUF failed (%d)\n", ret);
return ret;
}
}
fclose(fp);
// Release the resource
for (i=0; i< 4; i++)
{
munmap(framebuf[i].start, framebuf[i].length);
}
close(fd);
printf("Camera test Done.\n");
return 0;
}

















 6639
6639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









