







ROS学习的基本操作指令(二)
Ubuntu常规操作指令
Ubuntu常规操作指令
Ubuntu是一个以桌面应用为主的开源GNU/Linux操作系统, 是基于Debian GNU/Linux,支持x86、amd64(即x64)和ppc架构,由全球化的专业开发团队(Canonical Ltd)打造。同时,它也是ROS的得核心架构,目前的主流版本有Ubuntu14.04、16.04、18.04。
1、特权
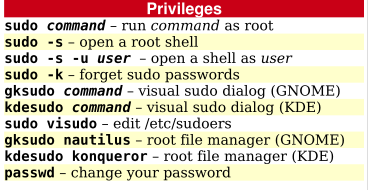
sudo
sudo是linux系统管理指令,是允许系统管理员让普通用户执行一些或者全部的root命令的一个工具。(部分操作见上图)
2、软件包管理

apt-get
apt-get install packagename
安装一个新软件包
apt-get remove packagename
卸载一个已安装的软件包(保留配置文档)
apt-get remove --purge packagename
卸载一个已安装的软件包(删除配置文档)
apt-get autoremove packagename
删除包及其依赖的软件包
apt-get autoremove --purge packagname
删除包及其依赖的软件包+配置文件,比上面的要删除的彻底一点
dpkg --force-all --purge packagename
有些软件很难卸载,而且还阻止了别的软件的应用,就能够用这个,但是有点冒险。
3、网络管理
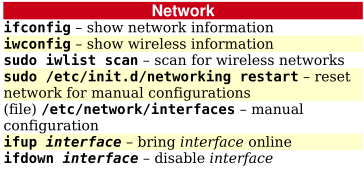
ifconfig 查看和配置网络接口
ifconfig eth0 查看指定网络接口的配置
ifconfig eth0 down禁用设备
ifconfig eth0 up激活设备
ping连通性测试
ping [参数] [域名或IP地址]
ping指定IP:ping 192.168.120.203
ping网关:ping -b 192.168.120.1
ping指定次数:ping -c 10 192.168.120.203
通过域名ping公网站点:ping -c 5 www.baidu.com
时间间隔和限定次数的ping:ping -c 10 -i 0.5 192.168.120.206
设置时间间隔/发送数据包长度/TTL值:ping -i 3 -s 1024 -t 255 192.168.120.206
4、系统
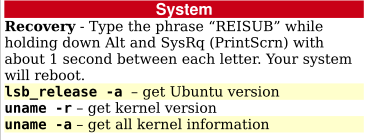
which ls 查看ls命令位置
echo $PATH 索引路径变量
env 查看当前进程的环境变量
编辑环境变量:
ls -a .bashrc 显示目录文件
gedit .bashrc
vim ~/bashrc 用户目录添加文件路径















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









