






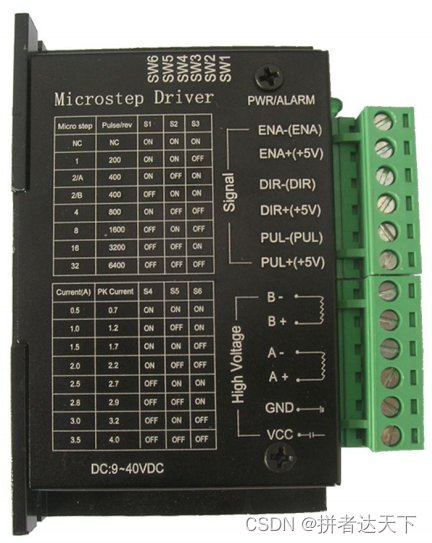
TB6600步进电机驱动器,可控制电机正反转,通过3位拨码开关选择7档细分控制,通过3位拨码开关控制8电流输出控制,适合用于42型、57型两相或四相步进电。
1、输入电压范围:DC9V~DC40V;输入电流为5A;输出电流为0.5~4.0A。
2、最大功耗为160W。
3、其输入端说明:VCC~电源输入正极; GND~电源输入负极;
PUL+~脉冲信号输入正; PUL-~脉冲信号输入负;
DIR+~电机正/反转控制正;DIR-~电机正/反转控制负;
EN+~电机脱机控制正; EN-~电机脱机控制负。
4、其输出端说明:A+~外接电机绕组1的正相(A);A-~外接电机绕组1的负相(C);
B+~外接电机绕组2的正相(B);B-~外接电机绕组2的负相(D);
5、其输入端接线说明:两种方式接线,分别为共阳极接法和共阴极接法。
共阳极接法:将PUL+、DIR+、EN+连接到控制系统的电源上,若是控制系统电源为+5V时则可直接接入;若控制系统电源>+5V时则需要另加限流电阻,以控制给驱动器内部光耦提供8-15mA的驱动电流。脉冲控制接入PUL-、方向控制接入DIR-、脱机控制接入EN-。
共阴极接法:将PUL-、DIR-、EN-连接到控制系统的地端,脉冲控制接入PUL+、方向控制接入DIR+、脱机控制接入EN+。若是需要增加限流电阻,其接法与说明同共阳极接法。
若控制系统电源为3.3V时,则同+5V接法一致。EN控制信号可不接。
1、程序调试说明:
步进电机为42型,采用共阴极接入方式;
外接单片机为BAT32G137芯片,其引脚分配为P72-DIR+、P71-PUL+;
更改TB6600驱动器的拨码开关,SW1/SW2/SW3为1600细分、SW4/SW5/SW6为0.5A输出电流(此处需注意设置的输出电流不能大于等于电机的额定电流),否则极容易出现电流过大导致电机运转中振动、发烫现象。
2、简单程序控制
根据TB6600驱动器和步进电机的使用说明,需在驱动器的PUL接口给与脉冲信号,方可驱动电机运转。本例程采用最简单的脉冲方式仅做初学使用。
int main()
{
uint32_t times;
//-----------------------------------------------------------------------
// P71 drives TB6600-PUL+
// P72 drives TB6600-DIR+
//-----------------------------------------------------------------------
PORT->P7 = 0x06U;
PORT->PM7 &= ~(3<<1); // P71,P72做输出模式
while(1)
{
//正转,times用于调整转动圈数
times = 1;
while(times++) {
PORT->P7 |= (1<<2); //控制正转方向
delay_us(36000); //延时时间可控制速度
PORT->P7 &= ~(1<<1);
delay_us(36000);
PORT->P7 |= (1<<1);
//1600细分时,1圈后反转
if(times == 1*1600) {
PORT->P7 &= ~(1<<2);
break;
}
}
//另一个方向转动
times = 1;
while(times++) {
PORT->P7 &= ~(1<<2); //控制反转方向
delay_us(24000);
PORT->P7 &= ~(1<<1);
delay_us(24000);
PORT->P7 |= (1<<1);
//1600细分,1圈
if(times == 1*1600) {
PORT->P7 |= (1<<2);
break;
}
}
}
}3、通过调整程序中的参数,即可控制电机运转。
延时时间:用于电机运转的速度;
times参数: 用于控制电机运转的圈数。
4、下一步可根据初步代码,调试定时器的PWM、中断方式进行电机的运转变化。

















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









