






CAN总线空闲状态
CAN总线的空闲状态是指CAN总线上没有任何数据传输时的电压状态。在这种状态下,CAN总线上的电压通常会保持在高电平,通常在2.5V到3.3V之间。这样的电平状态有助于确保节点之间的正常通信,并提供足够的噪声容限,以保证数据的可靠传输。此外,CAN控制器会定期发送空闲帧来维持总线的空闲状态,并通过这种方式告知其他节点当前总线处于空闲状态。稳定的高电平状态还可以抵抗来自外部环境的电磁干扰和噪声,提高CAN总线的性能。
在CAN协议的实现中,可以通过监测总线上的电压状态来判断是否处于空闲状态。如果总线上的电压出现连续的11位隐性电平(两根线电压差小于0.5V),这也被视为总线处于空闲状态的一个指示。需要注意的是,CAN总线的空闲状态电压可能会受到总线长度、总线拓扑结构和总线负载等因素的影响。因此,需要确保CAN总线空闲状态电压的稳定,以避免信号误判和通信故障。
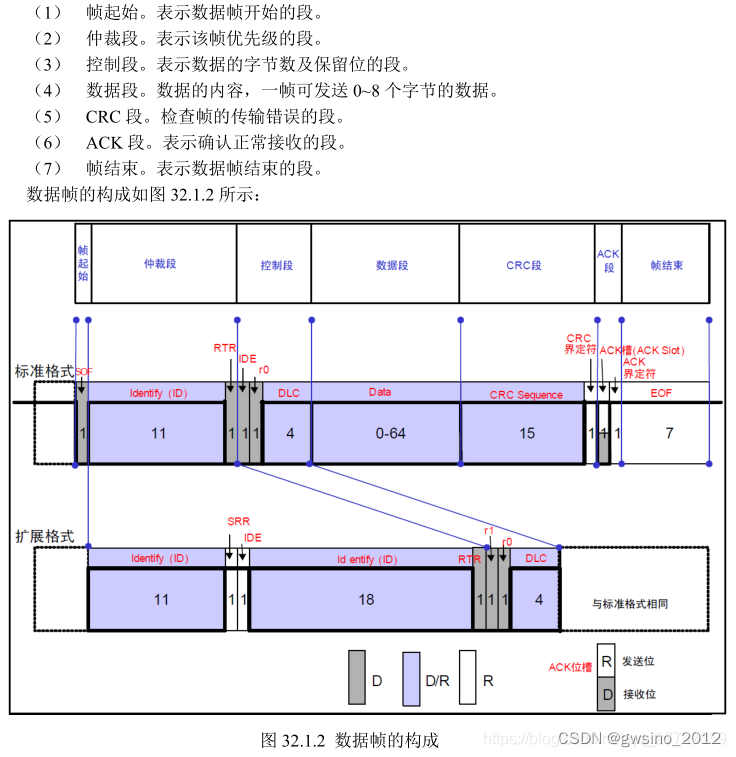
标准帧:1+11+1+1+1+4+64+15+1+1+1+7=108
扩展帧:108+2+18=128
结合帧间隙3个以上隐性电平,即+3。
波特率500k = 500 000 bit/s = 500 bit/ms
即1毫秒可传输 500 / (108 +3)= 4.504帧数据。
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/qq_27747359/article/details/90897558
如何通过预设负载值设计发送脚本
- 总线上除了自身发送报文,同时DUT也会间歇性发送报文;如果实现负载的动态调整,就需要在指定的时间内检测收发的报文数量,实现难度较大
- 如果只是控制发送报文的周期来实现负载值,此时只能实现相应的总线的最低负载率,当DUT同步发送报文的时候,会造成实际负载率高于预设值















 928
928











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









