







基于DQN的gym登山车🤔
更多代码: gitee主页:https://gitee.com/GZHzzz
博客主页: CSDN:https://blog.csdn.net/gzhzzaa
写在前面
作为一个新手,写这个强化学习-基础知识专栏是想和大家分享一下自己强化学习的学习历程,希望大家互相交流一起进步。希望自己在2022年能保证把强化学习基础概念都过一遍,主要是成体系介绍强化学习的基础知识,而且在gitee收集了强化学习经典论文和基于pytorch的经典模型 ,大家一起互相学习啊!可能会有很多错漏,希望大家批评指正!不要高估一年的努力,也不要低估十年的积累,与君共勉!
show me code, no bb
#这是一堆初始化
import gym
import random
import torch
import torch.nn as nn
from torch.utils.data import Dataset
import os
#env = gym.make('CartPole-v0')
env = gym.make('MountainCar-v0') #action = (0,1,2) = (left, no_act, right)
#env = gym.make('Hopper-v3')
print(env.observation_space)
#print(env.action_space)
#简单的线性模型
def mkdir(path):
folder = os.path.exists(path)
if not folder:
os.makedirs(path)
def GetModel():
#In features:2(state) ,out:3 action q
return nn.Sequential(nn.Linear(2, 16),
nn.LeakyReLU(inplace=True),
nn.Linear(16,24),
nn.LeakyReLU(inplace=True),
nn.Linear(24,3))
#创建数据集
class RLDataset(Dataset):
def __init__(self, samples, transform = None, target_transform = None):
#samples = [(s,a,r,s_), ...]
self.samples = self.transform(samples)
def __getitem__(self, index):
#if self.transform is not None:
# img = self.transform(img)
return self.samples[index]
def __len__(self):
return len(self.samples)
def transform(self, samples):
transSamples = []
for (s,a,r,s_) in samples:
sT = torch.tensor(s,).to(torch.float32)
sT_ = torch.tensor(s_).to(torch.float32)
transSamples.append((sT, a, r, sT_))
return transSamples
#采样环境函数,可以设置随机操作的概率。重点在于reward的设计
def GetSamplesFromEnv(env, model, epoch, max_steps, drop_ratio = 0.8):
train_samples = []
each_sample = None
env.reset()
observation_new = None
observation_old = None
model.eval()
for i_episode in range(epoch):
observation_new = env.reset()
observation_old = env.reset()
for t in range(max_steps):
env.render()
#print(observation)
if random.random() > 1-drop_ratio:
action = env.action_space.sample()
else:
inputT = torch.tensor(observation_new).to(torch.float32)
action = torch.argmax(model(inputT)).item()
#print(action)
observation_new, reward, done, info = env.step(action)
#print(reward)
#We record samples.
if t > 0 :
#reward += observation_new[0]
#if observation_new[0] > -0.35:
# reward += (observation_new[0] + 0.36)*5
if observation_new[0] > -0.2:
reward += 0.2
elif observation_new[0] > -0.15:
reward += 0.5
elif observation_new[0] > -0.1:
reward += 0.7
each_sample = (observation_old, action, reward, observation_new)
train_samples.append(each_sample)
observation_old = observation_new
if done:
#失败的采样不打印出来
if t != 199:
print("Episode finished after {} timesteps".format(t+1))
break
return train_samples
#训练网络。这里可能gather函数比较绕,还有双网络更新比较费解。忽略掉这些,和正常训练循环一样
#gamma是贝尔曼方程里的衰减因子
def TrainNet(net_target, net_eval, trainloader, criterion, optimizer, device, epoch_total, gamma):
running_loss = 0.0
iter_times = 0
net_target.eval()
net_eval.train()
for epoch in range(epoch_total + 1):
if epoch > 0:
print('epoch %d, loss %.5f' % (epoch, running_loss))
running_loss = 0.0
if epoch == epoch_total:
break
for i, data in enumerate(trainloader, 0):
if iter_times % 100 == 0:
net_target.load_state_dict(net_eval.state_dict())
s,a,r,s_ = data
optimizer.zero_grad()
#output = Q_predicted.
q_t0 = net_eval(s)
q_t1 = net_target(s_).detach()
q_t1 = gamma * (r + torch.max(q_t1,dim=1)[0]).to(torch.float32)
loss = criterion(q_t1, torch.gather(q_t0, dim=1, index=a.unsqueeze(1)).squeeze(1))
loss.sum().backward()
optimizer.step()
running_loss += loss.item()
iter_times += 1
net_target.load_state_dict(net_eval.state_dict())
print('Finished Training')
if __name__ == '__main__':
mkdir('model')
#最后是一大堆主循环
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
net_target, net_eval = GetModel(), GetModel()
criterion = nn.MSELoss()
optimizer = torch.optim.Adam(net_eval.parameters(),lr=0.01)
train_samples = []
goodmodel_idx = 0
for i in range(300):
drop_ratio = 0.8 - 0.0077*i
sample_times = 10
tmpSample = GetSamplesFromEnv(env,net_eval, sample_times, 200, drop_ratio)
train_samples += tmpSample
#每次sample的长度就代表了采取的步数,登山车里是越小越好。如果是倒立摆,则是越大越好
if len(tmpSample) < sample_times * 160:
print("good model!save it!")
torch.save(net_eval.state_dict(), "goodmodel" + str(goodmodel_idx) + ".pth")
goodmodel_idx += 1
#dataset里存着最新的不超过4000的样本
if len(train_samples) > 4000:
train_samples = train_samples[len(tmpSample):len(train_samples)]
trainset = RLDataset(train_samples)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=64, shuffle=True, num_workers=0,pin_memory=True)
TrainNet(net_target, net_eval, trainloader, criterion, optimizer, device, 10, 0.9)
if i%50 == 0:
PATH = "model/model"+str(i)+".pth"
torch.save(net_eval.state_dict(), PATH)
env.close()
#这一堆是测试看效果用的
#PATH = 'model/model42.pth'
#net_eval.load_state_dict(torch.load(PATH))
#net_target.load_state_dict(torch.load(PATH))
#GetSamplesFromEnv(env,net_eval, 20, 200, 0)
- 自己过了一遍,代码可直接跑通😎,包括模型保存,模型测试,你懂的!
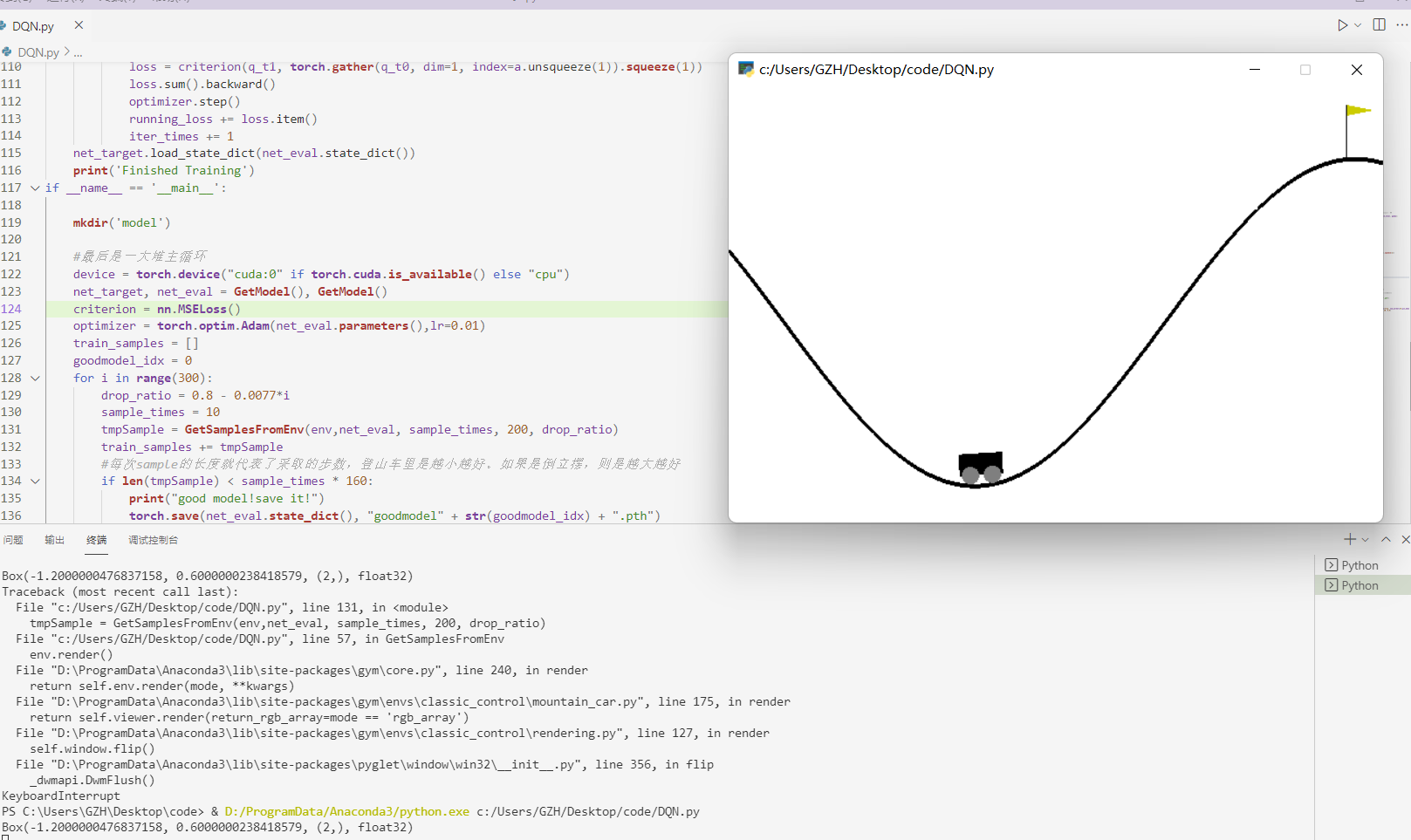
界面展示
写在最后
十年磨剑,与君共勉!
更多代码:gitee主页:https://gitee.com/GZHzzz
博客主页:CSDN:https://blog.csdn.net/gzhzzaa
- Fighting!😎

while True:
Go life

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











