







目录
参考:
https://www.cnblogs.com/ivantang/p/3904025.html
https://xiaolong.blog.csdn.net/article/details/117075834?spm=1001.2014.3001.5506
https://blog.csdn.net/weixin_47316662/article/details/124555292?spm=1001.2014.3001.5506
https://blog.csdn.net/qq_40574123/article/details/116722010?spm=1001.2014.3001.5506
https://yourcee.blog.csdn.net/article/details/107832198?spm=1001.2014.3001.5506
1.原理简介
RC522 是一种非接触式读写卡芯片,底层采用SPI模拟时序,可以应用于校园一卡通、水卡充值消费、公交卡充值消费设计、门禁卡等。

有两个部分,射频读写器和IC卡。射频读写器向IC卡发一组固定频率的电磁波,卡片内有一个LC串联谐振电路,其频率与读写器发射的频率相同,这样在电磁波激励下,LC谐振电路产生共振,从而使电容内有了电荷;在这个电荷的另一端,接有一个单向导通的电子泵,将电容内的电荷送到另一个电容内存储,当所积累的电荷达到2V时,此电容可作为电源为其它电路提供工作电压,将卡内数据发射出去或接受读写器的数据。
非接触性IC卡与读卡器之间通过无线电波来完成读写操作。二者之间的通讯频率为13.56MHZ。非接触性IC卡本身是无源卡,当读写器对卡进行读写操作时,读写器发出的信号由两部分叠加组成:一部分是电源信号,该信号由卡接收后,与本身的L/C产生一个瞬间能量来供给芯片工作。另一部分则是指令和数据信号,指挥芯片完成数据的读取、修改、储存等,并返回信号给读写器,完成一次读写操作。
流程:
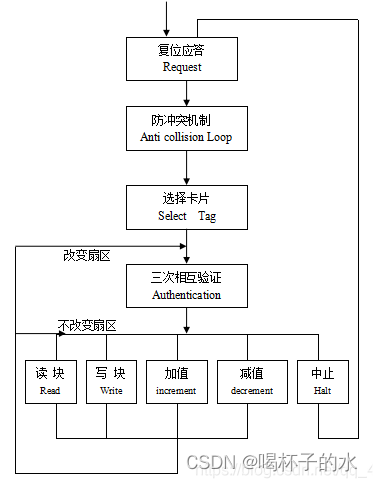
复位应答:M1射频卡的通讯协议和通讯波特率是定义好的,当有卡片进入读写器的操作范围时,读写器以特定的协议与它通讯,从而确定该卡是否为M1射频卡,即验证卡片的卡型。
防冲突机制:当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作,未选中的则处于空闲模式等待下一次选卡,该过程会返回被选卡的序列号。
选择卡片:选择被选中的卡的序列号,并同时返回卡的容量代码。
三次互相确认:选定要处理的卡片之后,读写器就确定要访问的扇区号,并对该扇区密码进行密码校验,在三次相互认证之后就可以通过加密流进行通讯。(在选择另一扇区时,则必须进行另一扇区密码校验。)
如果概括来说的话,主要也就四部分:开关连接、寻卡、验证密码、读取。
2.SPI通信
数据由MISO端口到RC52寄存器,RC522寄存器到MOSI端口
软件SPI通过控制MISO引脚和MOSI端口引脚的高低电平来控制数据的进出,下面读取和写入寄存器的函数都是靠这两个函数来接收和发送数据与外界
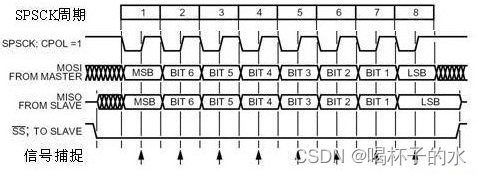
RC552采用模式3,上图为模式3的时序图,根据时序图写发送数据,共有8个时钟周期,所以循环8次, 按位查询需要发送的数据的高低电平,0将MOSI引输出低电平,1将MOSI输出高电平,然后调SCK时钟引脚,使时钟引脚输出低电平(默认状态高电平),延时一会,输出高电平。
void SPI_RC522_SendByte ( uint8_t byte )
{
uint8_t counter;
for(counter=0;counter<8;counter++)
{
if ( byte & 0x80 )
RC522_MOSI_1 ();
else
RC522_MOSI_0 ();
RC522_DELAY();
RC522_SCK_0 ();
RC522_DELAY();
RC522_SCK_1();
RC522_DELAY();
byte <<= 1;
}
}
/**
* @brief 从RC522发送1 Byte 数据
* @param 无
* @retval RC522返回的数据
*/
uint8_t SPI_RC522_ReadByte ( void )
{
uint8_t counter;
uint8_t SPI_Data;
for(counter=0;counter<8;counter++)
{
SPI_Data <<= 1;
RC522_SCK_0 ();
RC522_DELAY();
if ( RC522_MISO_GET() == 1)
SPI_Data |= 0x01;
RC522_DELAY();
RC522_SCK_1 ();
RC522_DELAY();
}
return SPI_Data;
}3.获取卡号实验
假设我们写522代码的目的是为了设计一个门禁系统,那有个问题是:我们需要从ic中读出什么数据?什么数据又是正确的数据?
卡片内部有块地址,它用于存放厂商代码,已经固化,不可更改。这样一个东西,叫做UID,这是一个存储在ic中的不可更改的数据,他是一个4字节16进制数,所以我们将他作为我们的判断依据。
开发板采用正点原子mini板,主控芯片为stm32F103RCT6
stm使用引脚
| 引脚名称 | 使用功能定义 |
|---|---|
| PB0 | 普通的GPIO口,用于复位RC522 |
| PA6 | SPI1的MISO |
| PA7 | SPI1的MOSI |
| PA5 | SPI1的SCK |
| PA4 | 普通的GPIO口,用于RC522的片选端口 |
RC522使用引脚说明
| 引脚名称 | 功能 |
|---|---|
| 3.3V | 电源正 |
| RST | 复位引脚,高电平有效 |
| GND | 地,电源负 |
| IRQ | 中断引脚,悬空不使用 |
| MISO | SPI协议数据线 |
| MOSI | SPI协议数据线 |
| SCK | SPI时钟线 |
| SDA | SPI片选端口 |
接线说明
| STM32F103 | RC522 |
|---|---|
| 3V3 | 3.3V |
| PB0 | RST |
| GND | GND |
| 不接 | IRQ |
| PA6 | MISO |
| PA7 | MOSI |
| PA5 | SCK |
| PA4 | SDA |
最后接好线烧录程序后,利用串口助手即可查看ic卡的uid,试了一下自己的校园卡也是可以刷出来的。主函数main.c
void IC_test ( void )
{
char cStr [ 30 ];
u8 ucArray_ID [ 4 ];
u8 ucStatusReturn;
static u8 ucLineCount = 0;
while ( 1 )
{
if ( ( ucStatusReturn = PcdRequest ( PICC_REQALL, ucArray_ID ) ) != MI_OK )
{
ucStatusReturn = PcdRequest ( PICC_REQALL, ucArray_ID );
}
if ( ucStatusReturn == MI_OK )
{
if ( PcdAnticoll ( ucArray_ID ) == MI_OK )
{
sprintf ( cStr, "The Card ID is: %02X%02X%02X%02X", ucArray_ID [ 0 ], ucArray_ID [ 1 ], ucArray_ID [ 2 ], ucArray_ID [ 3 ] );
printf ( "%s\r\n",cStr );
if ( ucLineCount == 0 )
ucLineCount ++;
if ( ucLineCount == 17 ) ucLineCount = 0;
}
}
}
}
3.驱动函数rcc.c
/*
* 函数名:SPI_RC522_SendByte
* 描述 :向RC522发送1 Byte 数据
* 输入 :byte,要发送的数据
* 返回 : RC522返回的数据
* 调用 :内部调用
*/
void SPI_RC522_SendByte ( u8 byte )
{
u8 counter;
for(counter=0;counter<8;counter++)
{
if ( byte & 0x80 )
macRC522_MOSI_1 ();
else
macRC522_MOSI_0 ();
// Delay_us ( 3 );
macRC522_DELAY();
macRC522_SCK_0 ();
// Delay_us ( 1 );
// Delay_us ( 3 );
macRC522_DELAY();
macRC522_SCK_1();
// Delay_us ( 3 );
macRC522_DELAY();
byte <<= 1;
}
}
/*
* 函数名:SPI_RC522_ReadByte
* 描述 :从RC522发送1 Byte 数据
* 输入 :无
* 返回 : RC522返回的数据
* 调用 :内部调用
*/
u8 SPI_RC522_ReadByte ( void )
{
u8 counter;
u8 SPI_Data;
for(counter=0;counter<8;counter++)
{
SPI_Data <<= 1;
macRC522_SCK_0 ();
// Delay_us ( 3 );
macRC522_DELAY();
if ( macRC522_MISO_GET() == 1)
SPI_Data |= 0x01;
// Delay_us ( 2 );
// Delay_us ( 3 );
macRC522_DELAY();
macRC522_SCK_1 ();
// Delay_us ( 3 );
macRC522_DELAY();
}
return SPI_Data;
}
/*
* 函数名:ReadRawRC
* 描述 :读RC522寄存器
* 输入 :ucAddress,寄存器地址
* 返回 : 寄存器的当前值
* 调用 :内部调用
*/
u8 ReadRawRC ( u8 ucAddress )
{
u8 ucAddr, ucReturn;
ucAddr = ( ( ucAddress << 1 ) & 0x7E ) | 0x80;
macRC522_CS_Enable();
SPI_RC522_SendByte ( ucAddr );
ucReturn = SPI_RC522_ReadByte ();
macRC522_CS_Disable();
return ucReturn;
}
/*
* 函数名:WriteRawRC
* 描述 :写RC522寄存器
* 输入 :ucAddress,寄存器地址
* ucValue,写入寄存器的值
* 返回 : 无
* 调用 :内部调用
*/
void WriteRawRC ( u8 ucAddress, u8 ucValue )
{
u8 ucAddr;
ucAddr = ( ucAddress << 1 ) & 0x7E;
macRC522_CS_Enable();
SPI_RC522_SendByte ( ucAddr );
SPI_RC522_SendByte ( ucValue );
macRC522_CS_Disable();
}
/*
* 函数名:SetBitMask
* 描述 :对RC522寄存器置位
* 输入 :ucReg,寄存器地址
* ucMask,置位值
* 返回 : 无
* 调用 :内部调用
*/
void SetBitMask ( u8 ucReg, u8 ucMask )
{
u8 ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}
/*
* 函数名:ClearBitMask
* 描述 :对RC522寄存器清位
* 输入 :ucReg,寄存器地址
* ucMask,清位值
* 返回 : 无
* 调用 :内部调用
*/
void ClearBitMask ( u8 ucReg, u8 ucMask )
{
u8 ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}
/*
* 函数名:PcdAntennaOn
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOn ( void )
{
u8 uc;
uc = ReadRawRC ( TxControlReg );
if ( ! ( uc & 0x03 ) )
SetBitMask(TxControlReg, 0x03);
}
/*
* 函数名:PcdAntennaOff
* 描述 :开启天线
* 输入 :无
* 返回 : 无
* 调用 :内部调用
*/
void PcdAntennaOff ( void )
{
ClearBitMask ( TxControlReg, 0x03 );
}
/*
* 函数名:PcdRese
* 描述 :复位RC522
* 输入 :无
* 返回 : 无
* 调用 :外部调用
*/
void PcdReset ( void )
{
macRC522_Reset_Disable();
Delay_us ( 1 );
macRC522_Reset_Enable();
Delay_us ( 1 );
macRC522_Reset_Disable();
Delay_us ( 1 );
WriteRawRC ( CommandReg, 0x0f );
while ( ReadRawRC ( CommandReg ) & 0x10 );
Delay_us ( 1 );
WriteRawRC ( ModeReg, 0x3D ); //定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363
WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位
WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位
WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置
WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数
WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
}
/*
* 函数名:M500PcdConfigISOType
* 描述 :设置RC522的工作方式
* 输入 :ucType,工作方式
* 返回 : 无
* 调用 :外部调用
*/
void M500PcdConfigISOType ( u8 ucType )
{
if ( ucType == 'A') //ISO14443_A
{
ClearBitMask ( Status2Reg, 0x08 );
WriteRawRC ( ModeReg, 0x3D );//3F
WriteRawRC ( RxSelReg, 0x86 );//84
WriteRawRC( RFCfgReg, 0x7F ); //4F
WriteRawRC( TReloadRegL, 30 );//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC ( TReloadRegH, 0 );
WriteRawRC ( TModeReg, 0x8D );
WriteRawRC ( TPrescalerReg, 0x3E );
Delay_us ( 2 );
PcdAntennaOn ();//开天线
}
}
/*
* 函数名:PcdComMF522
* 描述 :通过RC522和ISO14443卡通讯
* 输入 :ucCommand,RC522命令字
* pInData,通过RC522发送到卡片的数据
* ucInLenByte,发送数据的字节长度
* pOutData,接收到的卡片返回数据
* pOutLenBit,返回数据的位长度
* 返回 : 状态值
* = MI_OK,成功
* 调用 :内部调用
*/
char PcdComMF522 ( u8 ucCommand, u8 * pInData, u8 ucInLenByte, u8 * pOutData, u32 * pOutLenBit )
{
char cStatus = MI_ERR;
u8 ucIrqEn = 0x00;
u8 ucWaitFor = 0x00;
u8 ucLastBits;
u8 ucN;
u32 ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare认证
ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEn
ucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位
break;
case PCD_TRANSCEIVE: //接收发送 发送接收
ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位
break;
default:
break;
}
WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 ); //IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反
ClearBitMask ( ComIrqReg, 0x80 ); //Set1该位清零时,CommIRqReg的屏蔽位清零
WriteRawRC ( CommandReg, PCD_IDLE ); //写空闲命令
SetBitMask ( FIFOLevelReg, 0x80 ); //置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除
for ( ul = 0; ul < ucInLenByte; ul ++ )
WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdata
WriteRawRC ( CommandReg, ucCommand ); //写命令
if ( ucCommand == PCD_TRANSCEIVE )
SetBitMask(BitFramingReg,0x80); //StartSend置位启动数据发送 该位与收发命令使用时才有效
ul = 1000;//根据时钟频率调整,操作M1卡最大等待时间25ms
do //认证 与寻卡等待时间
{
ucN = ReadRawRC ( ComIrqReg ); //查询事件中断
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) ); //退出条件i=0,定时器中断,与写空闲命令
ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位
if ( ul != 0 )
{
if ( ! ( ReadRawRC ( ErrorReg ) & 0x1B ) ) //读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
ucN = ReadRawRC ( FIFOLevelReg ); //读FIFO中保存的字节数
ucLastBits = ReadRawRC ( ControlReg ) & 0x07; //最后接收到得字节的有效位数
if ( ucLastBits )
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits; //N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
else
* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = ReadRawRC ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
}
SetBitMask ( ControlReg, 0x80 ); // stop timer now
WriteRawRC ( CommandReg, PCD_IDLE );
return cStatus;
}
/*
* 函数名:PcdRequest
* 描述 :寻卡
* 输入 :ucReq_code,寻卡方式
* = 0x52,寻感应区内所有符合14443A标准的卡
* = 0x26,寻未进入休眠状态的卡
* pTagType,卡片类型代码
* = 0x4400,Mifare_UltraLight
* = 0x0400,Mifare_One(S50)
* = 0x0200,Mifare_One(S70)
* = 0x0800,Mifare_Pro(X))
* = 0x4403,Mifare_DESFire
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRequest ( u8 ucReq_code, u8 * pTagType )
{
char cStatus;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况
WriteRawRC ( BitFramingReg, 0x07 ); // 发送的最后一个字节的 七位
SetBitMask ( TxControlReg, 0x03 ); //TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号
ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 1, ucComMF522Buf, & ulLen ); //寻卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型
{
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdAnticoll
* 描述 :防冲撞
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAnticoll ( u8 * pSnr )
{
char cStatus;
u8 uc, ucSnr_check = 0;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ClearBitMask ( Status2Reg, 0x08 ); //清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
WriteRawRC ( BitFramingReg, 0x00); //清理寄存器 停止收发
ClearBitMask ( CollReg, 0x80 ); //清ValuesAfterColl所有接收的位在冲突后被清除
ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令
ucComMF522Buf [ 1 ] = 0x20;
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 2, ucComMF522Buf, & ulLen);//与卡片通信
if ( cStatus == MI_OK) //通信成功
{
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
SetBitMask ( CollReg, 0x80 );
return cStatus;
}
/*
* 函数名:CalulateCRC
* 描述 :用RC522计算CRC16
* 输入 :pIndata,计算CRC16的数组
* ucLen,计算CRC16的数组字节长度
* pOutData,存放计算结果存放的首地址
* 返回 : 无
* 调用 :内部调用
*/
void CalulateCRC ( u8 * pIndata, u8 ucLen, u8 * pOutData )
{
u8 uc, ucN;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for ( uc = 0; uc < ucLen; uc ++)
WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );
WriteRawRC ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = ReadRawRC ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );
pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}
/*
* 函数名:PcdSelect
* 描述 :选定卡片
* 输入 :pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdSelect ( u8 * pSnr )
{
char ucN;
u8 uc;
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
ClearBitMask ( Status2Reg, 0x08 );
ucN = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 9, ucComMF522Buf, & ulLen );
if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )
ucN = MI_OK;
else
ucN = MI_ERR;
return ucN;
}
/*
* 函数名:PcdAuthState
* 描述 :验证卡片密码
* 输入 :ucAuth_mode,密码验证模式
* = 0x60,验证A密钥
* = 0x61,验证B密钥
* u8 ucAddr,块地址
* pKey,密码
* pSnr,卡片序列号,4字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
cStatus = PcdComMF522 ( PCD_AUTHENT, ucComMF522Buf, 12, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) )
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdWrite
* 描述 :写数据到M1卡一块
* 输入 :u8 ucAddr,块地址
* pData,写入的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdWrite ( u8 ucAddr, u8 * pData )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
//memcpy(ucComMF522Buf, pData, 16);
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 18, ucComMF522Buf, & ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) || ( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/*
* 函数名:PcdRead
* 描述 :读取M1卡一块数据
* 输入 :u8 ucAddr,块地址
* pData,读出的数据,16字节
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdRead ( u8 ucAddr, u8 * pData )
{
char cStatus;
u8 uc, ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/*
* 函数名:PcdHalt
* 描述 :命令卡片进入休眠状态
* 输入 :无
* 返回 : 状态值
* = MI_OK,成功
* 调用 :外部调用
*/
char PcdHalt( void )
{
u8 ucComMF522Buf [ MAXRLEN ];
u32 ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE, ucComMF522Buf, 4, ucComMF522Buf, & ulLen );
return MI_OK;
}
void IC_CMT ( u8 * UID, u8 * KEY, u8 RW, u8 * Dat )
{
u8 ucArray_ID [ 4 ] = { 0 };//先后存放IC卡的类型和UID(IC卡序列号)
PcdRequest ( 0x52, ucArray_ID );//寻卡
PcdAnticoll ( ucArray_ID );//防冲撞
PcdSelect ( UID );//选定卡
PcdAuthState ( 0x60, 0x10, KEY, UID );//校验
if ( RW )//读写选择,1是读,0是写
PcdRead ( 0x10, Dat );
else
PcdWrite ( 0x10, Dat );
PcdHalt ();
}
rcc.h文件
#ifndef __RC52_H
#define __RC52_H
#include "sys.h"
#include "stm32f10x.h"
/*********************************** RC522 引脚定义 *********************************************/
#define macRC522_GPIO_CS_CLK_FUN RCC_APB2PeriphClockCmd
#define macRC522_GPIO_CS_CLK RCC_APB2Periph_GPIOA
#define macRC522_GPIO_CS_PORT GPIOA
#define macRC522_GPIO_CS_PIN GPIO_Pin_4
#define macRC522_GPIO_CS_Mode GPIO_Mode_Out_PP
#define macRC522_GPIO_SCK_CLK_FUN RCC_APB2PeriphClockCmd
#define macRC522_GPIO_SCK_CLK RCC_APB2Periph_GPIOA
#define macRC522_GPIO_SCK_PORT GPIOA
#define macRC522_GPIO_SCK_PIN GPIO_Pin_5
#define macRC522_GPIO_SCK_Mode GPIO_Mode_Out_PP
#define macRC522_GPIO_MOSI_CLK_FUN RCC_APB2PeriphClockCmd
#define macRC522_GPIO_MOSI_CLK RCC_APB2Periph_GPIOA
#define macRC522_GPIO_MOSI_PORT GPIOA
#define macRC522_GPIO_MOSI_PIN GPIO_Pin_7
#define macRC522_GPIO_MOSI_Mode GPIO_Mode_Out_PP
#define macRC522_GPIO_MISO_CLK_FUN RCC_APB2PeriphClockCmd
#define macRC522_GPIO_MISO_CLK RCC_APB2Periph_GPIOA
#define macRC522_GPIO_MISO_PORT GPIOA
#define macRC522_GPIO_MISO_PIN GPIO_Pin_6
#define macRC522_GPIO_MISO_Mode GPIO_Mode_IN_FLOATING
#define macRC522_GPIO_RST_CLK_FUN RCC_APB2PeriphClockCmd
#define macRC522_GPIO_RST_CLK RCC_APB2Periph_GPIOB
#define macRC522_GPIO_RST_PORT GPIOB
#define macRC522_GPIO_RST_PIN GPIO_Pin_0
#define macRC522_GPIO_RST_Mode GPIO_Mode_Out_PP
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18
/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/
//和MF522通讯时返回的错误代码
/
#define MI_OK 0
#define MI_NOTAGERR (1)
#define MI_ERR (2)
#define SHAQU1 0X01
#define KUAI4 0X04
#define KUAI7 0X07
#define REGCARD 0xa1
#define CONSUME 0xa2
#define READCARD 0xa3
#define ADDMONEY 0xa4
//
//#define spi_cs 1;
//sbit spi_ck=P0^6;
//sbit spi_mosi=P0^7;
//sbit spi_miso=P4^1;
//sbit spi_rst=P2^7;
#define SPIReadByte() SPIWriteByte(0)
u8 SPIWriteByte(u8 byte);
void SPI1_Init(void);
//void SPI2_Init(void);
#define SET_SPI_CS (GPIOA->BSRR=0X01)
#define CLR_SPI_CS (GPIOA->BRR=0X01)
#define SET_RC522RST GPIOA->BSRR=0X02
#define CLR_RC522RST GPIOA->BRR=0X02
/***********************RC522 函数宏定义**********************/
#define RC522_CS_Enable() GPIO_ResetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_CS_Disable() GPIO_SetBits ( GPIOA, GPIO_Pin_4 )
#define RC522_Reset_Enable() GPIO_ResetBits( GPIOB, GPIO_Pin_0 )
#define RC522_Reset_Disable() GPIO_SetBits ( GPIOB, GPIO_Pin_0)
#define RC522_SCK_0() GPIO_ResetBits( GPIOA, GPIO_Pin_5 )
#define RC522_SCK_1() GPIO_SetBits ( GPIOA, GPIO_Pin_5)
#define RC522_MOSI_0() GPIO_ResetBits( GPIOA, GPIO_Pin_7 )
#define RC522_MOSI_1() GPIO_SetBits ( GPIOA, GPIO_Pin_7 )
#define RC522_MISO_GET() GPIO_ReadInputDataBit ( GPIOA, GPIO_Pin_6 )
void RC522_Handel (void);
void RC522_Init ( void ); //初始化
void PcdReset ( void ); //复位
void M500PcdConfigISOType ( u8 type ); //工作方式
char PcdRequest ( u8 req_code, u8 * pTagType ); //寻卡
char PcdAnticoll ( u8 * pSnr); //读卡号
char PcdSelect ( u8 * pSnr );
char PcdAuthState ( u8 ucAuth_mode, u8 ucAddr, u8 * pKey, u8 * pSnr );
char PcdWrite ( u8 ucAddr, u8 * pData );
char PcdRead ( u8 ucAddr, u8 * pData );
void ShowID(u8 *p); //显示卡的卡号,以十六进制显示
extern char* POINT_LNG;
extern char* POINT_LAT;
extern char* POINT_LNG_ON;
extern char* POINT_LAT_ON;
extern char* POINT_LNG_OFF;
extern char* POINT_LAT_OFF;
u8 shibieka(void);
#endif

















 1470
1470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









