







目录
一、前言
使用4G模块进行联网使用,并配合MQTT协议进行数据的收发,4G联网模块GA10是一款功能强大、应用广泛、易于集成的模块,为物联网设备提供了高效、可靠的无线网络连接解决方案。
二、简介
-
模块概述:
- GA10模块基于4G LTE技术,支持FDD LTE和TD-LTE两种制式,并向下兼容2G/3G网络。
- 模块尺寸小巧,便于集成到各类设备中,提供高速、稳定的无线网络连接。
-
主要功能:
- 高速数据传输:支持高达100Mbps的下行速率和50Mbps的上行速率,满足高速互联网接入和无线数据传输需求。
- 网络通信:实现与4G网络的通信,确保设备能够在无线环境下进行网络连接和数据传输。
- 多频段支持:支持多个频段,适应不同地区和运营商的网络需求,提供广泛的网络覆盖。
- 低功耗设计:模块采用低功耗设计,有助于延长物联网设备的电池寿命,适合长时间运行的应用。
- 安全性:提供安全的数据传输通道,支持加密和身份验证等功能,确保数据的机密性和完整性。
-
硬件特点:
- 集成度高:将射频、基带芯片集成在一块PCB板上,完成无线接收、发射、基带信号处理等功能。
-
软件特性:
- 支持多种协议:支持TCP/IP、PPP、FTP、HTTP等网络协议,方便用户开发和应用。
- 易于开发:提供丰富的AT命令集,简化开发流程,缩短产品上市时间。
-
应用场景:
- 适用于物联网设备、智能家居、远程监控、车载系统、自动售货机、共享设备等多种场景。
-
优势:
- 稳定性:模块设计考虑了恶劣环境下的稳定性,适应性强。
- 兼容性好:与多种网络制式和设备兼容,便于部署和扩展。
- 成本效益:相比有线网络连接,4G联网模块具有更高的成本效益。
三、资料获取
关注微信公众号--星之援工作室 发送关键字(GA10)
使用串口进行控制 提供主要代码 开源,可自行移植
➡️🫡🫡🫡🫡🫡🫡🫡🫡➡️

四、设备使用
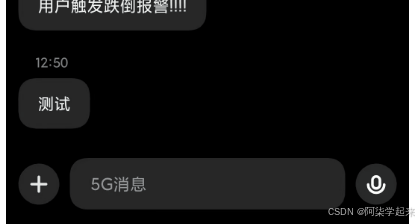
实现效果
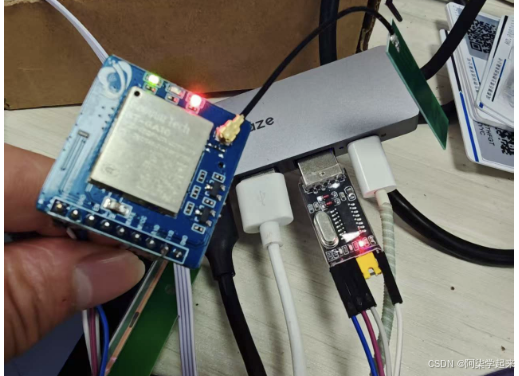
连接好线 打开串口工具 即可输出获取的数据
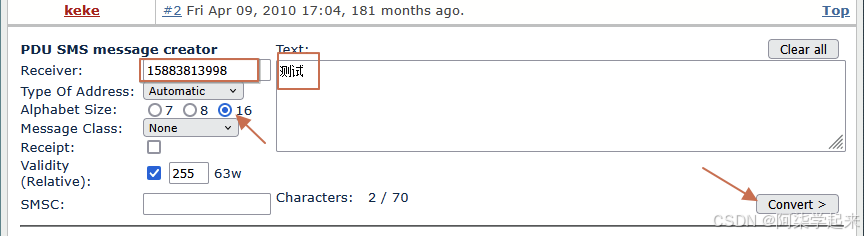
中文信息数据转换
1. 配置完串口后,我们需要开始编写我们的联网模块的主要代码,主要包括联网和发短信两部分,首先给大家分享一个可用将字符串转换成PUD的一个网站
发短信消息的转换网站链接http://smstools3.kekekasvi.com/topic.php?id=288
2. 输入自己的相关信息即可,点击转换,获取下面的转换信息,我们如果发中文短信就需要用到
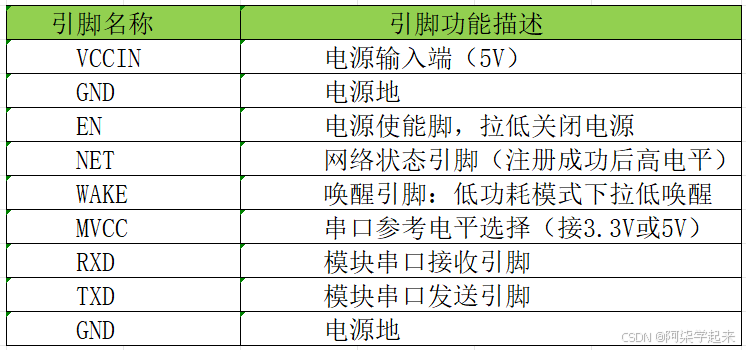
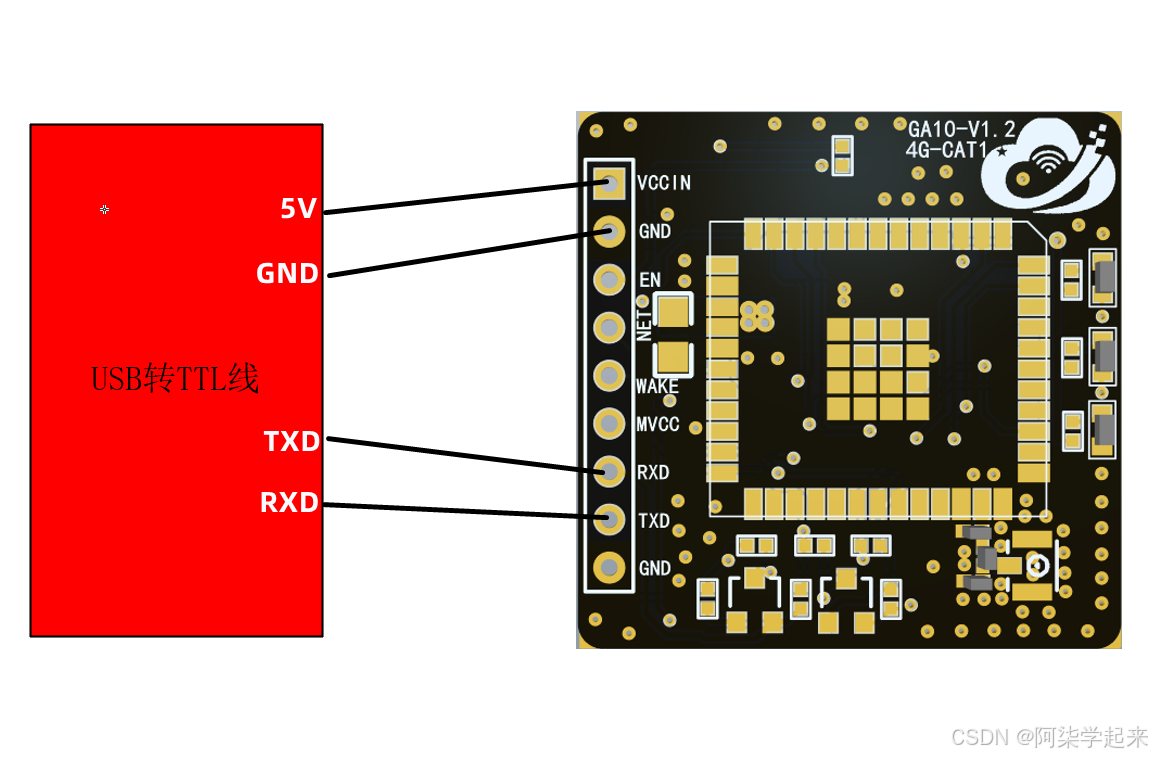
接线
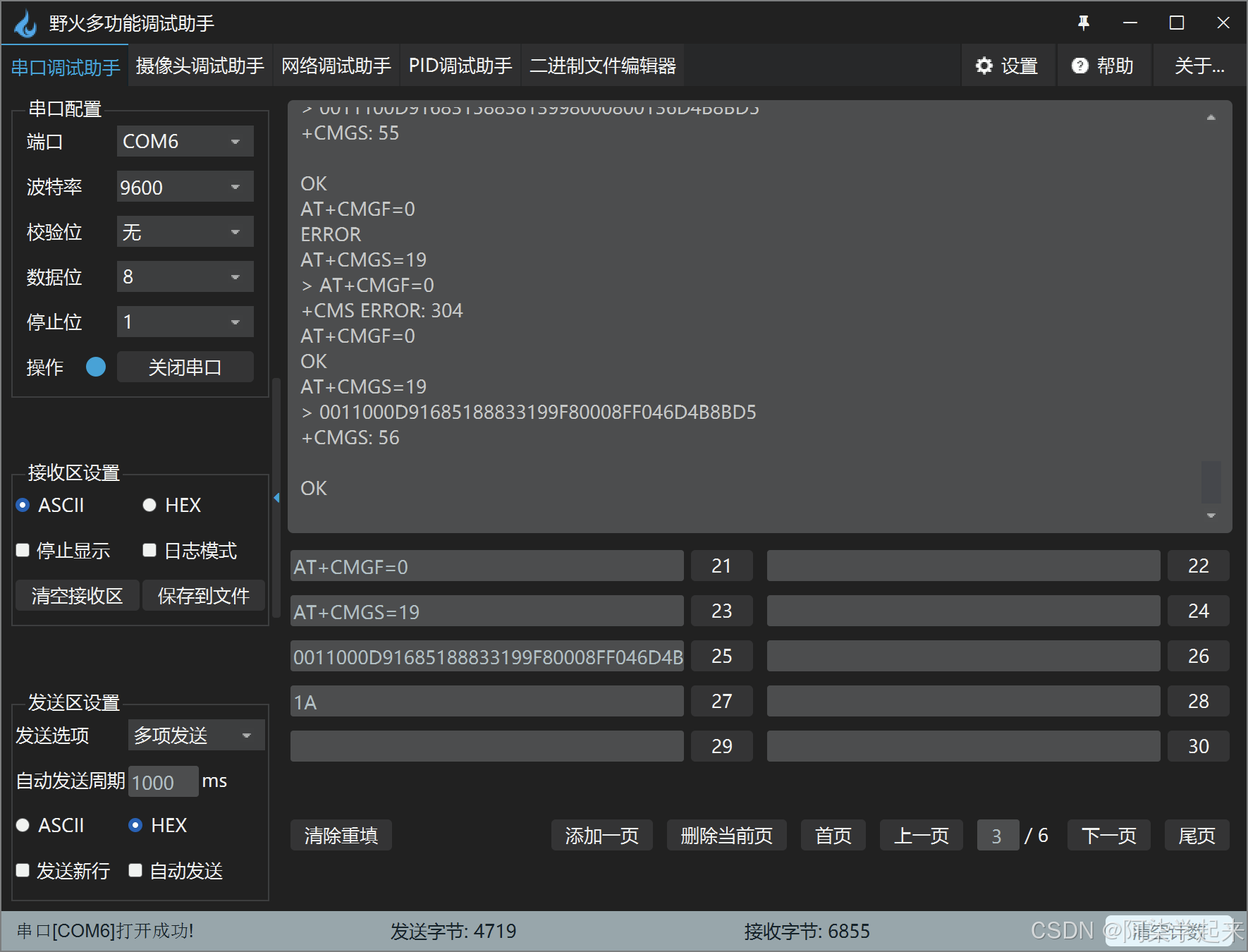
前面三个需要加上换行符号
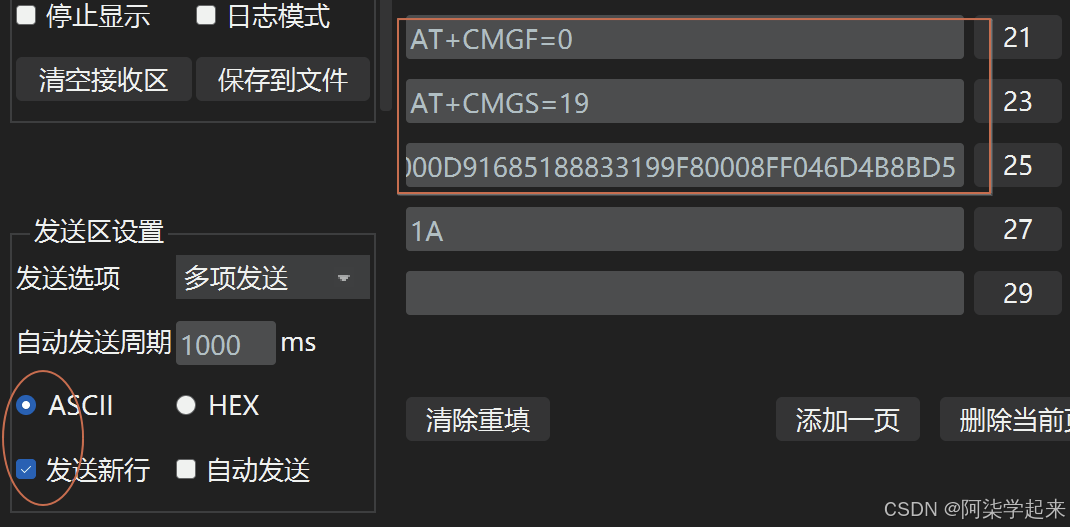
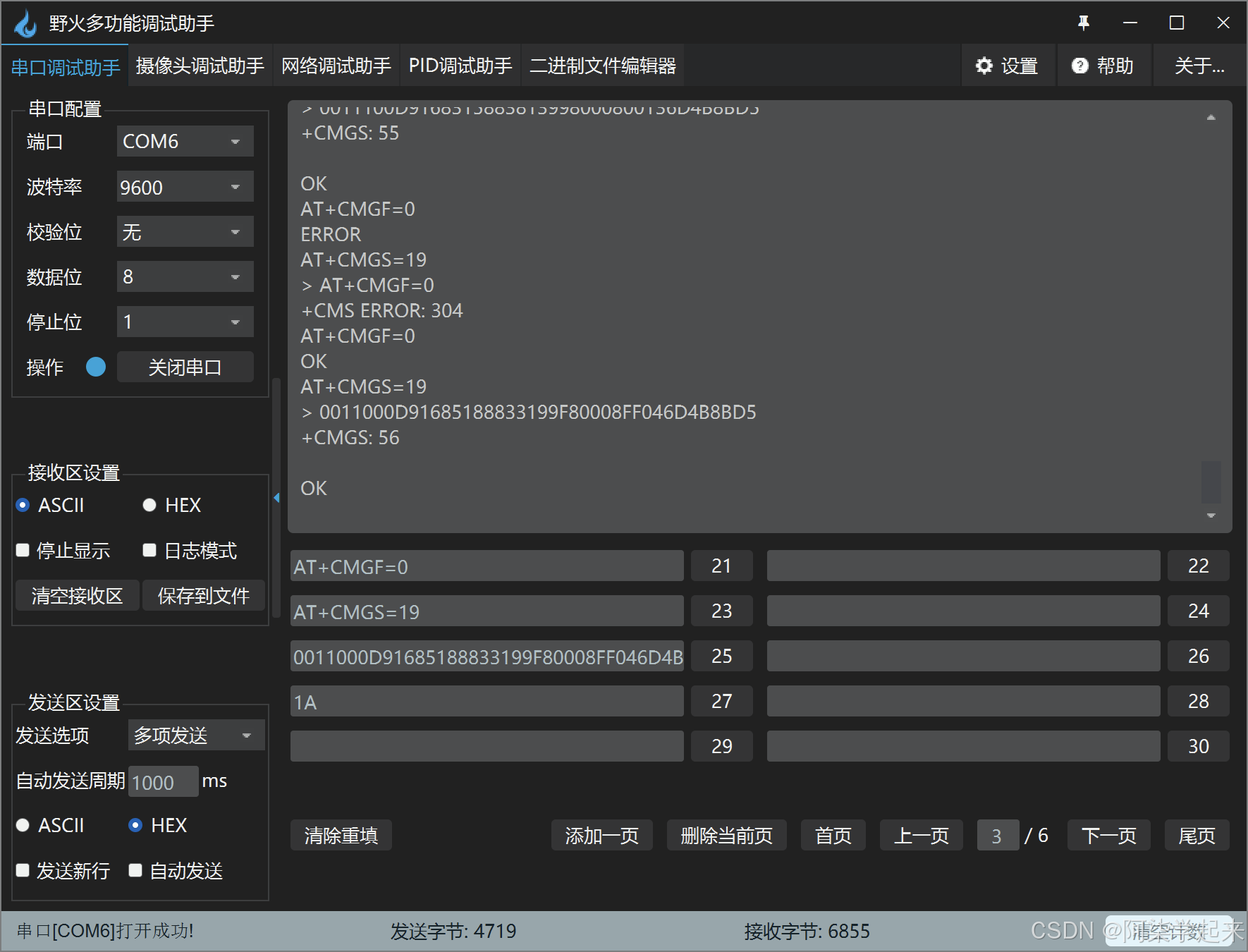
定义类似
AT+CMGF=0定义 数据长度
AT+CMGS=19
文本内容(自定义)
0011000D91685188833199F80008FF046D4B8BD5
结束符号 需要用16进制发送
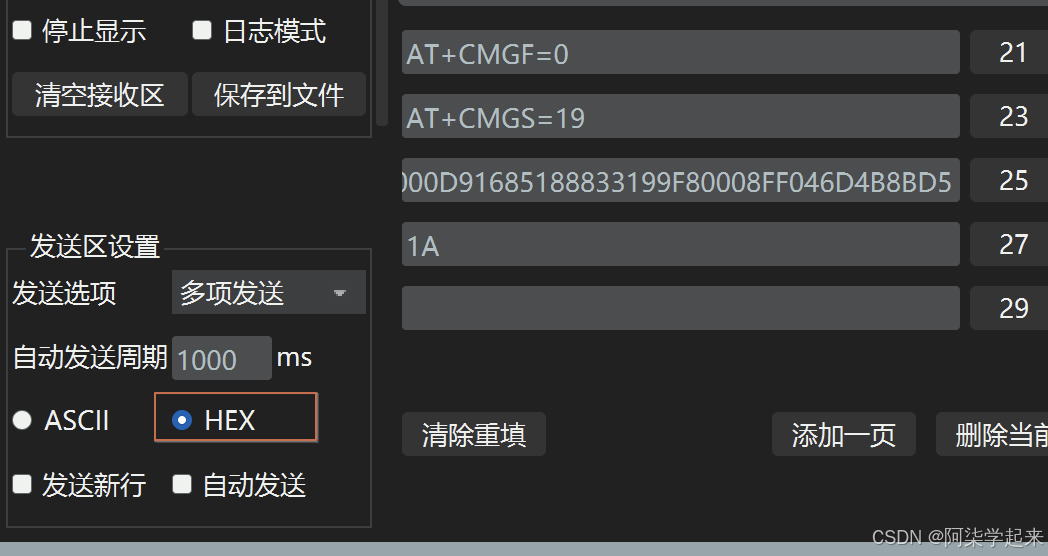
1A四、代码编写
GA10.c
主要使用函数实例
int GA6_Send_GMS(U8 cmd)
{
char str[2];
char end_char[2];
end_char[0] = 0x1A;
end_char[1] = '\0';
printf("配置为PDU模式\r\n");
while (GAB_SendCmd("AT+CMGF=0", "OK", 200))
delay_ms(300);
switch (cmd)
{
case 1:
sprintf(str, "AT+CMGS=%d", CMGS1_NUM);
while (GAB_SendCmd(str, ">", 200))
delay_ms(300);
break;
case 2:
sprintf(str, "AT+CMGS=%d", CMGS2_NUM);
while (GAB_SendCmd(str, ">", 200))
delay_ms(300);
break;
}
switch (cmd)
{
case 1:
// 老人需要帮助,请关注!!
printf("%d %s\n", CMGS2_NUM, pdu_content1);
GA6_SendData((unsigned char *)pdu_content1, strlen((const char *)pdu_content1));
break;
case 2:
// 老人已离开服务区,请重点关注!!
printf("%d %s\n", CMGS2_NUM, pdu_content2);
GA6_SendData((unsigned char *)pdu_content2, strlen((const char *)pdu_content2));
break;
}
printf("OK\n");
while (GAB_SendCmd(end_char, "OK", 300))
delay_ms(300);
return 1;
}main
// 主函数
int main(void)
{
// 设备初始化 需要自己添加
XXXXX
while (1) {
// 串口接收判断
dataPtr = (char*)ESP8266_GetIPD(0);
if (dataPtr != NULL) {
massage_ga10_json(dataPtr); // 接收命令
}
}
}usart3.c
实现串口
// 网络设备驱动
#include "usart3.h"
// 硬件驱动
#include "delay.h"
#include "usart.h"
// C库
#include <string.h>
#include <stdio.h>
// #define ESP8266_WIFI_INFO "AT+CWJAP=\"ChinaNet-y3ir\",\"12345678\"\r\n"
#define ESP8266_WIFI_INFO "AT+CWJAP=\"hhh\",\"12345678\"\r\n"
#define ESP8266_ONENET_INFO "AT+CIPSTART=\"TCP\",\"183.230.40.39\",6002\r\n"
unsigned char esp8266_buf[256];
unsigned short esp8266_cnt = 0, esp8266_cntPre = 0;
//==========================================================
// 函数名称: ESP8266_Clear
//
// 函数功能: 清空缓存
//
// 入口参数: 无
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_Clear(void)
{
memset(esp8266_buf, 0, sizeof(esp8266_buf));
esp8266_cnt = 0;
}
//==========================================================
// 函数名称: ESP8266_WaitRecive
//
// 函数功能: 等待接收完成
//
// 入口参数: 无
//
// 返回参数: REV_OK-接收完成 REV_WAIT-接收超时未完成
//
// 说明: 循环调用检测是否接收完成
//==========================================================
_Bool ESP8266_WaitRecive(void)
{
if (esp8266_cnt == 0) // 如果接收计数为0 则说明没有处于接收数据中,所以直接跳出,结束函数
return REV_WAIT;
if (esp8266_cnt == esp8266_cntPre) // 如果上一次的值和这次相同,则说明接收完毕
{
esp8266_cnt = 0; // 清0接收计数
return REV_OK; // 返回接收完成标志
}
esp8266_cntPre = esp8266_cnt; // 置为相同
return REV_WAIT; // 返回接收未完成标志
}
//==========================================================
// 函数名称: ESP8266_SendCmd
//
// 函数功能: 发送命令
//
// 入口参数: cmd:命令
// res:需要检查的返回指令
//
// 返回参数: 0-成功 1-失败
//
// 说明:
//==========================================================
_Bool ESP8266_SendCmd(char *cmd, char *res, u16 time)
{
Usart3_SendString((unsigned char *)cmd, strlen((const char *)cmd));
while (time--)
{
if (ESP8266_WaitRecive() == REV_OK) // 如果收到数据
{
// printf("%s\n", esp8266_buf);
if (strstr((const char *)esp8266_buf, res) != NULL) // 如果检索到关键词
{
ESP8266_Clear(); // 清空缓存
return 0;
}
}
delay_ms(10);
}
return 1;
}
//==========================================================
// 函数名称: ESP8266_SendData
//
// 函数功能: 发送数据
//
// 入口参数: data:数据
// len:长度
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_SendData(unsigned char *data, unsigned short len)
{
char cmdBuf[32];
ESP8266_Clear(); // 清空接收缓存
sprintf(cmdBuf, "AT+CIPSEND=%d\r\n", len); // 发送命令
if (!ESP8266_SendCmd(cmdBuf, ">", 200)) // 收到‘>’时可以发送数据
{
}
Usart3_SendString(data, len); // 发送设备连接请求数据
}
//==========================================================
// 函数名称: ESP8266_GetIPD
//
// 函数功能: 获取平台返回的数据
//
// 入口参数: 等待的时间(乘以10ms)
//
// 返回参数: 平台返回的原始数据
//
// 说明: 不同网络设备返回的格式不同,需要去调试
// 如ESP8266的返回格式为 "+IPD,x:yyy" x代表数据长度,yyy是数据内容
//==========================================================
unsigned char *ESP8266_GetIPD(unsigned short timeOut)
{
char *ptrIPD = NULL;
do
{
if (ESP8266_WaitRecive() == REV_OK) // 如果接收完成
{
ptrIPD = strstr((char *)esp8266_buf, "MTRECV"); // 搜索“IPD”头
if (ptrIPD == NULL) // 如果没找到,可能是IPD头的延迟,还是需要等待一会,但不会超过设定的时间
{
// printf("\"IPD\" not found\r\n");
}
else
{
ptrIPD = strchr(ptrIPD, '{'); // 找到'{'
if (ptrIPD != NULL)
{
// ptrIPD++;
return (unsigned char *)(ptrIPD);
}
else
return NULL;
}
}
delay_ms(5); // 延时等待
} while (timeOut--);
return NULL; // 超时还未找到,返回空指针
}
//==========================================================
// 函数名称: ESP8266_Init
//
// 函数功能: 初始化ESP8266
//
// 入口参数: 无
//
// 返回参数: 无
//
// 说明:
//==========================================================
void ESP8266_Init(void)
{
char str[125];
delay_ms(250);
delay_ms(250);
// GPIO_WriteBit(GPIOB, GPIO_Pin_6, Bit_SET);
// delay_ms(500);
ESP8266_Clear();
printf("AT\r\n");
while (ESP8266_SendCmd("AT\r\n\r", "OK", 200))
delay_ms(300);
printf("CWMODE\r\n");
while (ESP8266_SendCmd("AT+CWMODE=1\r\n", "OK", 200))
delay_ms(300);
printf("AT+CWDHCP\r\n");
while (ESP8266_SendCmd("AT+CWDHCP=1,1\r\n", "OK", 200))
delay_ms(300);
printf("CWJAP\r\n");
memset(str, 0, sizeof(str));
sprintf(str, "AT+CWJAP=\"%s\",\"%s\"\r\n", SSID, PASS);
while (ESP8266_SendCmd(str, "GOT IP", 200))
delay_ms(300);
printf("CIPSTART\r\n");
memset(str, 0, sizeof(str));
sprintf(str, "AT+CIPSTART=\"TCP\",\"%s\",%d\r\n", ServerIP, ServerPort);
while (ESP8266_SendCmd(str, "CONNECT", 200))
delay_ms(500);
printf("ESP8266 Init OK\r\n");
}
/*
************************************************************
* 函数名称: Usart3_Init
*
* 函数功能: 串口3初始化
*
* 入口参数: baud:设定的波特率
*
* 返回参数: 无
*
* 说明: TX-PB10 RX-PB11
************************************************************
*/
void Usart3_Init(unsigned int baud)
{
GPIO_InitTypeDef gpio_initstruct;
USART_InitTypeDef usart_initstruct;
NVIC_InitTypeDef nvic_initstruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
// PA2 TXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_initstruct.GPIO_Pin = GPIO_Pin_10;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
// PA3 RXD
gpio_initstruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_initstruct.GPIO_Pin = GPIO_Pin_11;
gpio_initstruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &gpio_initstruct);
usart_initstruct.USART_BaudRate = baud;
usart_initstruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控
usart_initstruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 接收和发送
usart_initstruct.USART_Parity = USART_Parity_No; // 无校验
usart_initstruct.USART_StopBits = USART_StopBits_1; // 1位停止位
usart_initstruct.USART_WordLength = USART_WordLength_8b; // 8位数据位
USART_Init(USART3, &usart_initstruct);
USART_Cmd(USART3, ENABLE); // 使能串口
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); // 使能接收中断
nvic_initstruct.NVIC_IRQChannel = USART3_IRQn;
nvic_initstruct.NVIC_IRQChannelCmd = ENABLE;
nvic_initstruct.NVIC_IRQChannelPreemptionPriority = 1;
nvic_initstruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&nvic_initstruct);
}
//==========================================================
// 函数名称: USART2_IRQHandler
//
// 函数功能: 串口2收发中断
//
// 入口参数: 无
//
// 返回参数: 无
//
// 说明:
//==========================================================
void USART3_IRQHandler(void)
{
if (USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) // 接收中断
{
if (esp8266_cnt >= sizeof(esp8266_buf))
esp8266_cnt = 0; // 防止串口被刷爆
esp8266_buf[esp8266_cnt++] = USART3->DR;
USART_ClearFlag(USART3, USART_FLAG_RXNE);
}
}
/*
************************************************************
* 函数名称: Usart_SendString
*
* 函数功能: 串口数据发送
*
* 入口参数: USARTx:串口组
* str:要发送的数据
* len:数据长度
*
* 返回参数: 无
*
* 说明:
************************************************************
*/
void Usart3_SendString(unsigned char *str, unsigned short len)
{
unsigned short count = 0;
// printf("%s\n", str);
for (; count < len; count++)
{
USART_SendData(USART3, *str++); // 发送数据
while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET)
; // 等待发送完成
}
}
usart3.h
实现串口
#ifndef _ESP8266_H_
#define _ESP8266_H_
/*-------------------------------------------------*/
/* */
/* 操作Wifi功能的头文件 */
/* */
/*-------------------------------------------------*/
#include "git.h"
// 单片机头文件
#include "stm32f10x.h"
#define REV_OK 0 // 接收完成标志
#define REV_WAIT 1 // 接收未完成标志
void ESP8266_Init(void);
void Usart3_Init(unsigned int baud);
void ESP8266_Clear(void);
void ESP8266_SendData(unsigned char *data, unsigned short len);
unsigned char *ESP8266_GetIPD(unsigned short timeOut);
void Usart3_SendString(unsigned char *str, unsigned short len);
_Bool ESP8266_SendCmd(char *cmd, char *res, u16 time);
_Bool ESP8266_WaitRecive(void);
#endif


















 1231
1231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











