







rtthread studio与正点原子apollo[10]--I2C设备之光环境传感器AP3216
前言
本文继续介绍I2C设备的使用,带有I2C接口的传感器都可以采用此方法,只需要根据特定的通信协议进行简单的修改。
I2C设备的介绍和具体使用方法已在前章介绍,因此本文直接介绍I2C访问AP3216的过程
一、光传感器AP3216简介
AP3216C是敦南科技退出的一款三合一环境传感器,它包含了:数字环境光传感器(ALS)、接近传感器(PS)和一个红外LED(IR)。该芯片通过IIC接口和MCU连接,并支持中断(INT)输出。
AP3216内部结构如图:
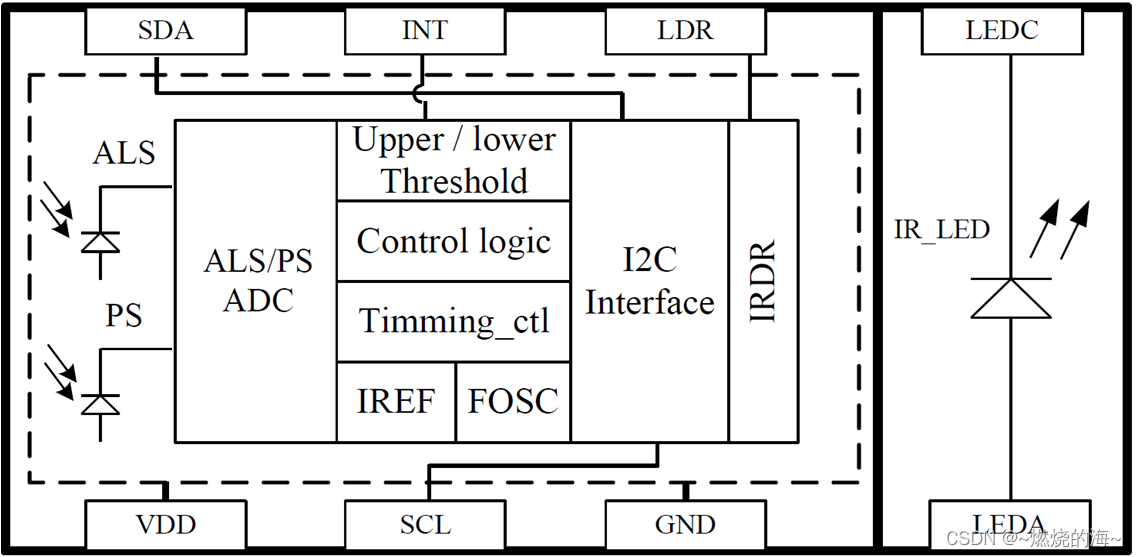
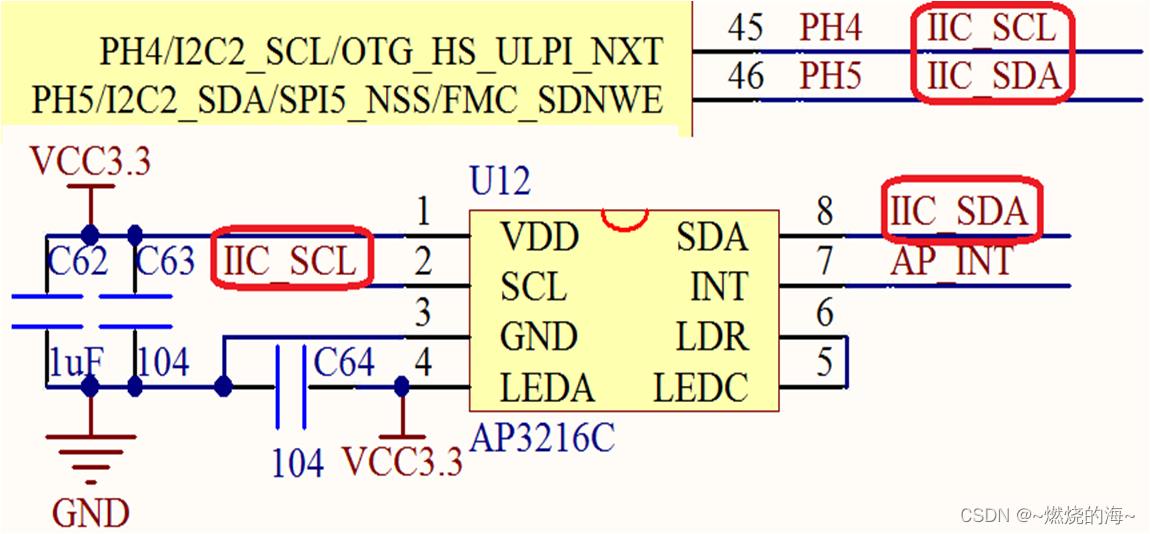
引脚说明:

AP3216C与MCU只需要连接SCL、SDA和INT,就可以实现驱动。其SCL和SDA同24C02共用,连接在PH4和PH5上,INT脚连接在PCF8574的P1上。
AP3216寄存器的位定义及其功能描述:
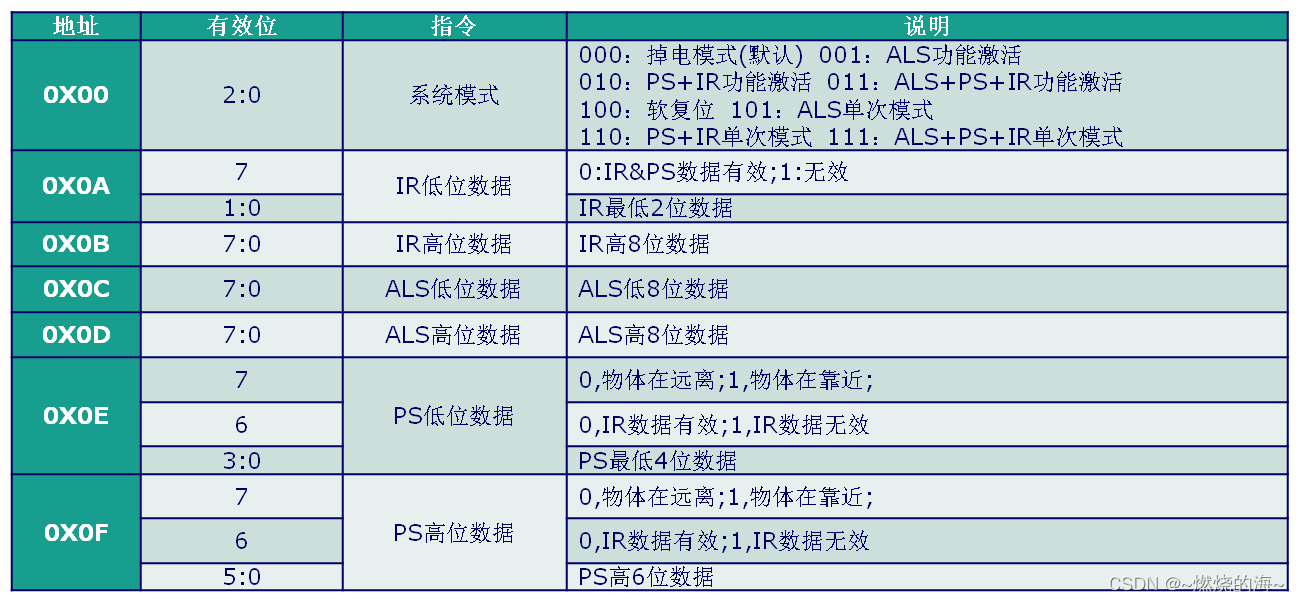
AP3216的操作有写和读两种模式,写模式主要是配置其系统模式,读模式是将传感器数据读出到MCU中。
写模式的时序,这种模式比较简单,先写地址(0X1E),然后是结存器地址+寄存器内容:
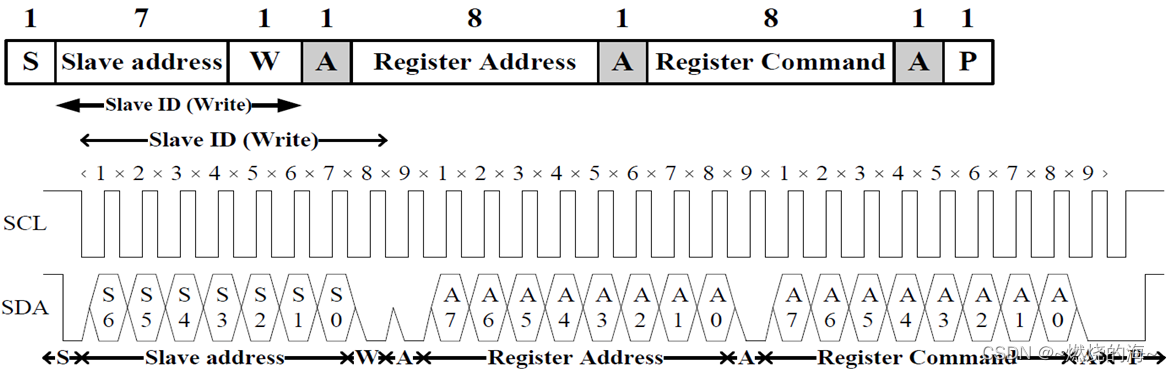
读模式相对复杂,此过程除了读取操作还有写操作,其时序
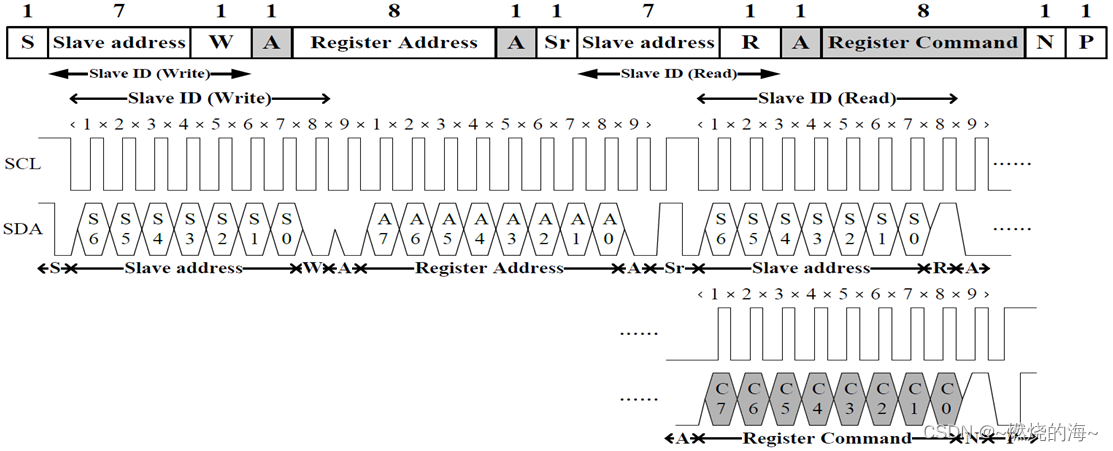
先写从机地址+寄存器地址,之后再进行读操作,从机地址+寄存器。
二、AP3216操作实例
i2c的访问方法前文已介绍,这里不做过多说明,直接给出实例代码
#include <rtthread.h>
#include <board.h>
#include <rtdevice.h>
#define AP_IIC_DEV_NAME "i2c1"
#define AP_IIC_ADD 0x1E
static struct rt_i2c_bus_device *i2c_bus=RT_NULL;
static struct rt_thread thread1;
static char thread1_stack[2048];
static rt_err_t ap3216_write(struct rt_i2c_bus_device *bus, rt_uint8_t reg, rt_uint8_t data)//根据通信协议编写对应的写操作
{
struct rt_i2c_msg msgs;
rt_uint16_t buf_size=1;
rt_uint8_t send_buf[2];
send_buf[0]=reg;
if(data!=RT_NULL)
{
send_buf[1]=data;
buf_size=2;
}
msgs.addr=AP_IIC_ADD;
msgs.buf=send_buf;
msgs.flags=RT_I2C_WR;
msgs.len=buf_size;
if(rt_i2c_transfer(bus, &msgs, buf_size)==1)
return RT_EOK;
else
return -RT_ERROR;
}
static rt_err_t ap3216_read(struct rt_i2c_bus_device *bus,rt_uint8_t reg, rt_uint8_t *buf)//根据通信协议编写相应的读操作
{
struct rt_i2c_msg msgs[2];
msgs[0].addr=AP_IIC_ADD;
msgs[0].buf=®
msgs[0].flags=RT_I2C_WR;
msgs[0].len=1;
msgs[1].addr=AP_IIC_ADD;
msgs[1].buf=buf;
msgs[1].flags=RT_I2C_RD;
msgs[1].len=1;
if(rt_i2c_transfer(bus, msgs, 2)==2)
return RT_EOK;
else
return -RT_ERROR;
}
static rt_err_t ap3216_init(void)
{
rt_uint8_t temp;
rt_uint8_t addr;
rt_uint8_t data;
addr=0x00;
data=0x04;
ap3216_write(i2c_bus,addr,data);//重启传感器
rt_thread_mdelay(50);
data=0x03;
ap3216_write(i2c_bus,addr,data);//开启ALS、PS+IR
rt_thread_mdelay(50);
ap3216_read(i2c_bus,addr, &temp);
if(temp == 0x03)
return RT_EOK;
else{
rt_kprintf("init failed\n");
return -RT_ERROR;
}
}
rt_uint16_t ir, als, ps;
static void ap3216_entry(void *parameter)
{
rt_uint8_t i;
rt_uint8_t buf[6];
i2c_bus=(struct rt_i2c_bus_device *)rt_device_find(AP_IIC_DEV_NAME);
if(i2c_bus==RT_NULL)
{
rt_kprintf("can't find s% device!\n",AP_IIC_DEV_NAME);
return;
}
else
rt_kprintf("find s%!\n",AP_IIC_DEV_NAME);
ap3216_init();
while(1){
for(i = 0; i < 6; i++){
ap3216_read(i2c_bus,0x0A+i, buf+i);
}
if(buf[0] & 0x80)
ir=0; //IR_OF位为1,则数据无效
else
ir=((rt_uint16_t)buf[1]<<2)|(buf[0]&0x03); //读取IR传感器的数据
als=((rt_uint16_t)buf[3]<<8)|buf[2]; //读取ALS传感器的数据
if(buf[4]&0x40)
ps=0; //IR_OF位为1,则数据无效
else
ps=((rt_uint16_t)(buf[5] & 0x3F)<<4)|(buf[4]&0x0F); //读取PS传感器的数据
rt_kprintf("%d\t",ir);
rt_kprintf("%d\t",als);
rt_kprintf("%d\t\n",ps);
rt_thread_mdelay(500);
}
}
int ap_thread_init(void)
{
rt_thread_init(&thread1,"ap3216_thread", ap3216_entry, RT_NULL, &thread1_stack[0], sizeof(thread1_stack), 20, 10);
rt_thread_startup(&thread1);
return 0;
}
总结
I2C访问传感器的过程,重点是其读操作过程,需要根据特定的传感器协议编写代码。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









