







 全景相机的拼接效果受器件选型、光学结构设计和重叠区域等因素影响。器件一致性对于图像拼接效果至关重要,紧凑的光学结构能减少视差问题。推荐的重叠区域为单镜头视角的15%,而Slave模式的Sensor可以确保曝光同步,避免错位现象。对焦一致性也是决定拼接质量的关键,必须确保多镜头对焦距离一致且稳定。
全景相机的拼接效果受器件选型、光学结构设计和重叠区域等因素影响。器件一致性对于图像拼接效果至关重要,紧凑的光学结构能减少视差问题。推荐的重叠区域为单镜头视角的15%,而Slave模式的Sensor可以确保曝光同步,避免错位现象。对焦一致性也是决定拼接质量的关键,必须确保多镜头对焦距离一致且稳定。
本篇文章有部分摘抄 海思的拼接设计指南 ;
对任何多目拼接产品而言,器件选型以及光学结构设计都非常关键,是影响拼接效果
的重要因素
多目camera器件的一致性。
器件包括镜头、图像传感器、滤光片等, 器件的一致性越好,多目摄像头之间重
叠区域的图像表现一致性越好,图像拼接效果越佳。同时,器件特性的一致性也
可以简化针对器件物理特性的标定,比如按照个体标定降低为按照型号标定,可
显著降低量产难度;
光学结构的紧凑型。
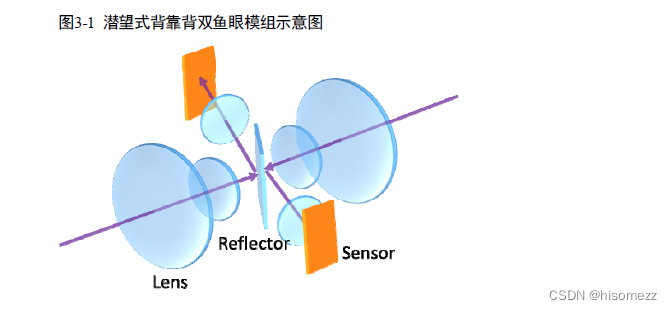
多目拼接视差问题是影响拼接效果的核心因素,多镜头的入瞳位置靠的越近(外
观上表现为多镜头结构越紧凑),视差问题越小,拼接效果越好;所以尺寸很重要,现在消费类的双目全景相机,大部分会采用潜望镜的形式,来减小设备厚度和光心重合;
合理的重叠区域。
多目镜头之间视角适当重叠是拼接算法可正常工作的前提,基于实践,我们推荐
两两镜头之间视角的重叠区域保持为单镜头视角的15%左右。重叠区涉及到sensor和镜头的匹配,分辨率和视场角的选择,性能和分辨率的选择,一组相互关系;不同镜头数量的全景,其选择也会不同;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1513
1513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









