






平台:嵌入式Linux version 3.10.0
交叉编译工具 arm-hisiv300-linux-
模块硬件图片:

整体流程参考官方文档《Quectel_LTE&5G_Linux_USB_Driver_User_Guide_V2.0.pdf》
注:文中所提的文档都会在文末给出。
一、移植驱动
从参考的文档看,5G的移植其实和4G模块如EC20的移植是一样的,并无二异。
1.内核驱动添加厂家ID和产品ID
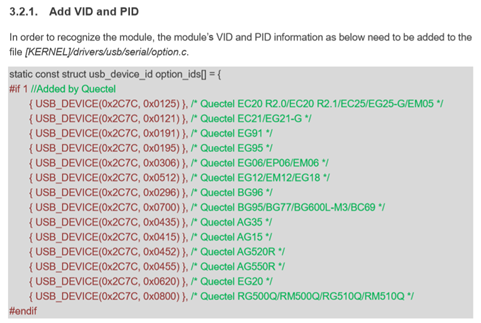
文档给出的RG500Q的VID和PID如下:

需要注意的是一种模块可能有多种型号,之前就遇到EC20模块的PID对不上,需要从用户手册上获取,没有文档的情况下可通过命令lsusb获取:
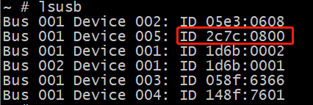
VID和PID确认无误后根据文档往[KERNEL]/drivers/usb/serial/option.c文档增加对应的ID
处理如下:
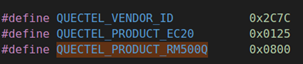
增加宏:
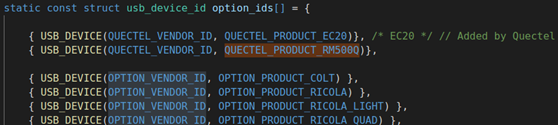
添加进结构体:
2.添加零包处理
根据USB协议的要求,在大容量传输时需要添加处理零包的机制
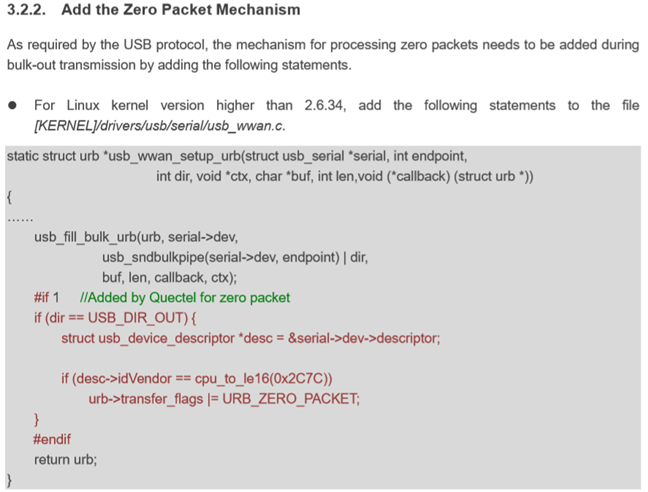
处理如下:
3.配置重置机制
因为MCU进入暂停/睡眠模式时,部分USB主机控制器/USB hub会断电或复位,MCU退出暂停/睡眠模式后无法使用USB恢复。所以需要配置一下重置机制。
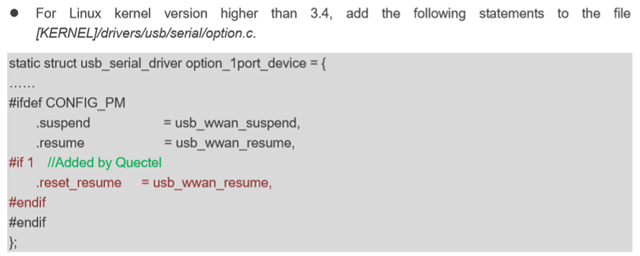
处理如下:
4.添加对MBIM, GobiNet和QMI_WWWAN驱动的支持
如果需要使用MBIM、GobiNet或QMI_WWAN驱动,要添加以下语句,防止模块接口4被用作USB串口设备
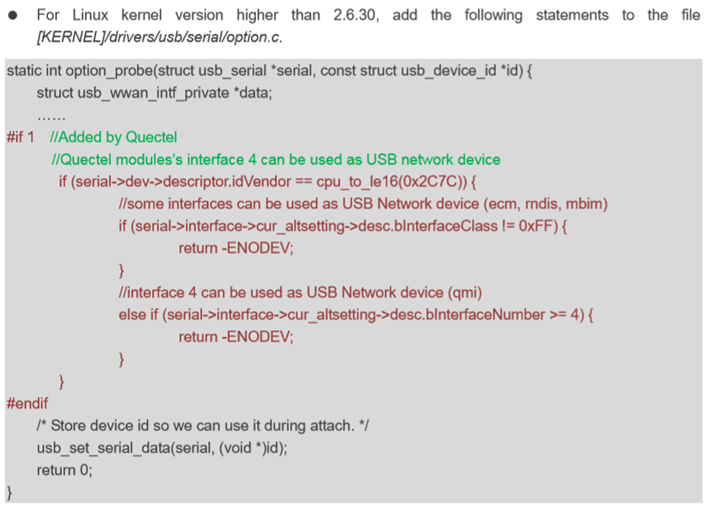
处理如下:
到这里,内核的源码配置就完成了,接下来配置内核的编译选项,以支持USB设备。
make menuconfig
[*] Device Drivers →
[*] USB Support →
[*] USB Serial Converter support →
[*] USB driver for GSM and CDMA modems

5.配置GobiNet拨号驱动
驱动程序一般厂家会提供源码《Quectel_Linux&Android_GobiNet_Driver_V1.6.2.9.zip》,全部拷贝到内核[KERNEL]/drivers/net/usb/目录

同样是需要修改内核配置增加USB网络框架,并修改[KERNEL]/drivers/net/usb/Makefile
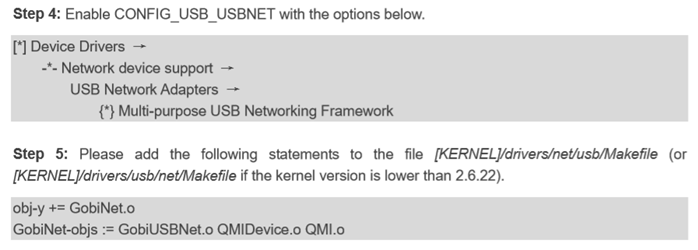
最后编译内核即可。
二、交叉编译拨号软件
拨号软件quectel-CM也是由厂家提供,文件名为《Quectel_QConnectManager_Linux_V1.6.0.16.zip》
解压后直接make即可
llc@llc:~/work /quectel-CM$ make CROSS_COMPILE=arm-hisiv300-linux-
最后将编译好的quectel-CM拷贝到板子上即可运行。
# ./quectel-CM&
[01-21_16:28:14:852] Quectel_QConnectManager_Linux_V1.6.0.16
[01-21_16:28:14:864] Find /sys/bus/usb/devices/1-2 idVendor=0x2c7c idProduct=0x800, bus=0x001, dev=0x005
[01-21_16:28:14:864] Auto find qmichannel = /dev/qcqmi0
[01-21_16:28:14:864] Auto find usbnet_adapter = usb0
[01-21_16:28:14:864] netcard driver = GobiNet, driver version = V1.6.2.9
[01-21_16:28:14:865] ioctl(0x89f3, qmap_settings) failed: No such file or directory, rc=-1
[01-21_16:28:14:865] Modem works in QMI mode
[01-21_16:28:14:884] Get clientWDS = 11
[01-21_16:28:14:916] Get clientDMS = 12
[01-21_16:28:14:948] Get clientNAS = 13
[01-21_16:28:14:979] Get clientUIM = 14
[01-21_16:28:15:013] Get clientWDA = 15
[01-21_16:28:15:045] requestBaseBandVersion EC20CEFILGR06A05M1G
[01-21_16:28:15:172] requestGetSIMStatus SIMStatus: SIM_READY
[01-21_16:28:15:204] requestGetProfile[1] 3gnet///0
[01-21_16:28:15:236] requestRegistrationState2 MCC: 460, MNC: 1, PS: Attached, DataCap: LTE
[01-21_16:28:15:268] requestQueryDataCall IPv4ConnectionStatus: DISCONNECTED
[01-21_16:28:15:268] ifconfig usb0 0.0.0.0
[01-21_16:28:15:287] ifconfig usb0 down
[01-21_16:28:15:364] requestSetupDataCall WdsConnectionIPv4Handle: 0x86d2a6e0
[01-21_16:28:15:524] ifconfig usb0 up
[01-21_16:28:15:544] busybox udhcpc -f -n -q -t 5 -i usb0
[01-21_16:28:15:558] udhcpc (v1.20.2) started
[01-21_16:28:15:562] Setting IP address 0.0.0.0 on usb0
[01-21_16:28:15:577] Sending discover...
[01-21_16:28:15:584] Sending select for 10.96.170.218...
[01-21_16:28:15:587] Lease of 10.96.170.218 obtained, lease time 7200
[01-21_16:28:15:597] Setting IP address 10.96.170.218 on usb0
[01-21_16:28:15:607] Deleting routers
route: SIOCDELRT: No such process
[01-21_16:28:15:611] Adding router 10.96.170.217
[01-21_16:28:15:628] Recreating /etc/resolv.conf
[01-21_16:28:15:628] Adding DNS server 120.80.80.80
[01-21_16:28:15:628] Adding DNS server 221.5.88.88
如上所示,DNS自动配置后即可拨号上网,测试可以ping一下百度的地址。
注意模块需要接上天线,文件系统DHCP配置(拨号软件需要分配IP)这里就不再展开。
正在上传…重新上传取消Quectel_LTE&5G_Linux_USB_Driver_User_Guide_V2.pdf
正在上传…重新上传取消Quectel_QConnectManager_Linux_V1.zip
正在上传…重新上传取消Quectel_Linux&Android_GobiNet_Driver_V1.zip
四、测试
模块开机后在/dev/目录下会出现ttyUSB0、ttyUSB1、ttyUSB2、ttyUSB3其中ttyUSB2可用于AT通信
cat /dev/ttyUSB2 &
echo -e "AT+CSQ\r\n" >/dev/ttyUSB2
或者
microcom -t 5000 -s 115200 /dev/ttyUSB2
AT

















 8827
8827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









