







目录
Dijkstra 算法(稠密图 边 >= 点的平方 O(n^2))
⭐堆优化版 Dijkstra 算法(稀疏图 边 < 点的平方 O(mlogn))
染色法 O(m + n) (注:此算法用于判断图是否为二分图)
匈牙利算法 (O(mn),实际运行时间一般远小于O(mn))(注:用于判断最大匹配数)
搜索
dfs(深度优先搜索):一条路走到黑。沿着一条路一直搜索,直到走不通时,再进行回溯。
bfs(广度优先搜索):像波纹一样层层向外扩展。每层搜索完全后,在进行下一层的搜索。
拓扑排序
一个序列,包含图中所有的点;在这个序列中,排在后面的点,不会有指向排在前面节点的出边。且这个序列不是唯一的。
#include<iostream>
#include<cstring>
#include<algorithm>
using namespace std;
const int N = 100010;
int h[N], e[N], ne[N], idx;
int q[N], d[N];
int n, m;
void add(int a, int b)
{
e[idx] = b , ne[idx] = h[a], h[a] = idx ++;
}
bool topsort()
{
int hh = 0, tt = -1;
for (int i = 1; i <= n; i ++ )
if (!d[i]) q[ ++ tt] = i;
while (hh <= tt)
{
int t = q[hh ++];
for (int i = h[t]; i != -1; i = ne[i])
{
int j = e[i];
d[j] --;
if (d[j] == 0) q[ ++ tt] = j;
}
}
return tt == n - 1;
}
int main()
{
cin >> n >> m;
memset(h, -1, sizeof h);
for (int i = 0; i < m; i ++)
{
int a, b;
cin >> a >> b;
add(a, b);
d[b] ++;
}
if (topsort())
{
for (int i = 0; i < n; i ++) cout << q[i];
puts("");
}
else puts("-1");
return 0;
}最短路
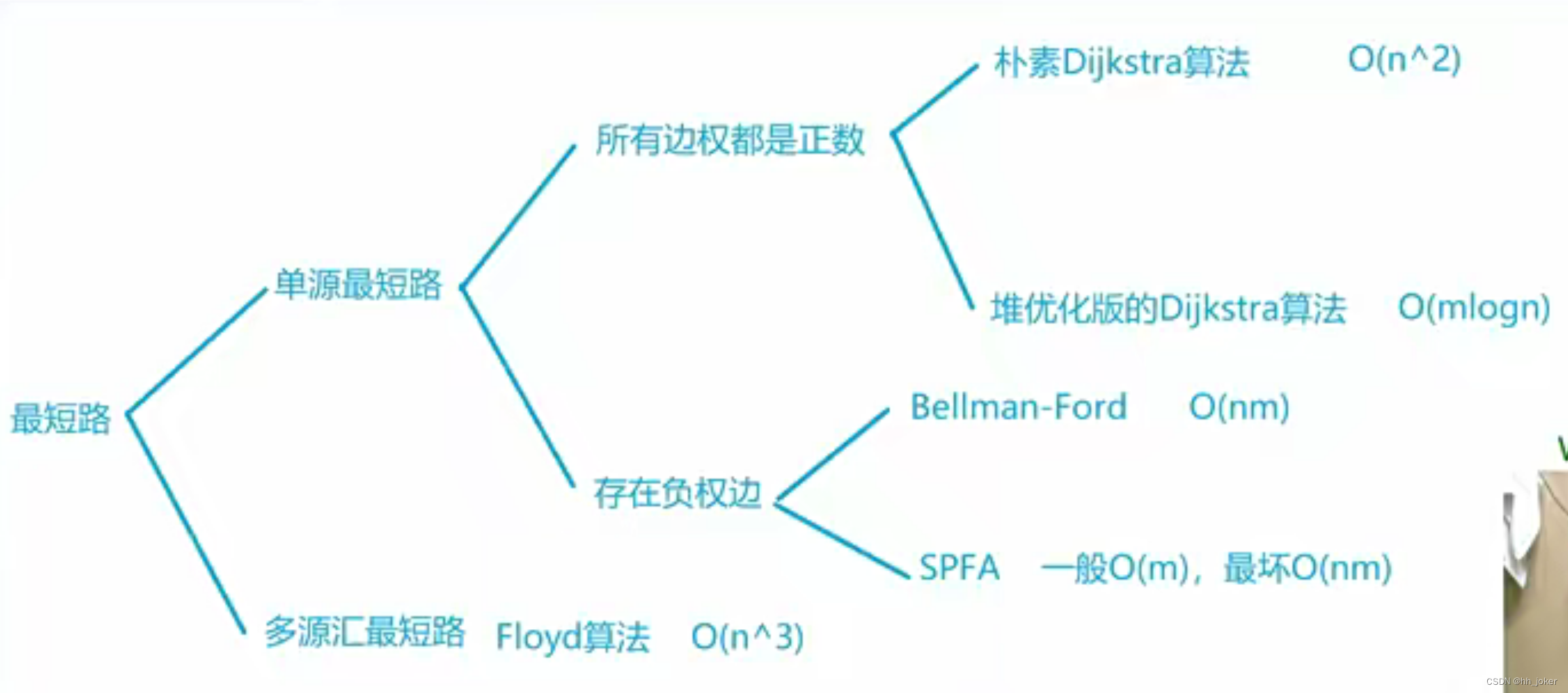
Dijkstra 算法(稠密图 边 >= 点的平方 O(n^2))
#include<cstring>
#include<iostream>
#include<algorithm>
using namespace std;
const int N = 10010;
int n, m;
int g[N][N];
int dist[N];
bool st[N];
int dijkstra()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
for (int i = 0; i < n; i ++)
{
int t = -1;
for (int j = 1; j <= n; j ++)
if (!st[j] && (t == -1 || dist[t] > dist[j]))
t = j;
st[t] = true;
for (int j = 1; j <= n; j ++)
dist[j] = min (dist[j], dist[t] + g[t][j]);
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}
int main()
{
cin >> n >> m;
memset (g, 0x3f, sizeof g);
while (m --)
{
int a, b, c;
cin >> a >> b >> c;
g[a][b] = min (g[a][b], c);
}
int t = dijkstra();
cout << t;
return 0;
}⭐堆优化版 Dijkstra 算法(稀疏图 边 < 点的平方 O(mlogn))
#include<cstring>
#include<iostream>
#include<algorithm>
#include<queue>
using namespace std;
typedef pair<int, int> PII;
const int N = 100010;
int n, m;
int h[N], w[N], e[N], ne[N], idx;
int dist[N];
bool st[N];
void add(int a, int b, int c)
{
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++;
}
int dijkstra()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
priority_queue<PII, vector<PII>, greater<PII> > heap;
heap.push({0, 1});
while (heap.size())
{
PII t = heap.top();
heap.pop();
int ver = t.second, distance = t.first;
if (st[ver]) continue;
for (int i = h[ver]; i != -1; i = ne[i])
{
int j = e[i];
if (dist[j] > distance + w[i])
{
dist[j] = distance + w[i];
heap.push ({dist[j], j});
}
}
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}
int main()
{
cin >> n >> m;
memset (h, -1, sizeof h);
while (m --)
{
int a, b, c;
cin >> a >> b >> c;
add (a, b, c);
}
int t = dijkstra();
cout << t;
return 0;
}Bellman-Ford O(nm)
#include<cstring>
#include<iostream>
#include<algorithm>
using namespace std;
const int N = 510, M = 10010;
int n, m, k;
int dist[N], backup[N];
struct Edge
{
int a, b, w;
}edges[M];
int bellman_ford()
{
for (int i = 0; i < k; i ++) // 只经过 K 条边, 能到的点的最短距离
{
memcpy(backup, dist, sizeof dist);
for (int j = 0; j < m; j ++)
{
int a = edges[j].a, b = edges[j].b, w = edges[j].w;
dist[b] = min(dist[b], backup[a] + w);
}
}
if (dist[n] > 0x3f3f3f3f / 2) return -1;
return dist[n];
}
int main()
{
cin >> n >> m >> k;
for (int i = 0; i < m; i ++)
{
int a, b, w;
cin >> a >> b >> w;
edges[i] = {a, b, w};
}
int t = bellman_ford();
if (t == -1) puts("impossible");
else cout << t << endl;
return 0;
}⭐SPFA(一般O(m), 最坏O(nm))
#include <cstring>
#include <iostream>
#include <algorithm>
#include <queue>
using namespace std;
const int N = 100010;
int n, m;
int h[N], w[N], e[N], ne[N], idx;
int dist[N], cnt[N];
bool st[N];
void add(int a, int b, int c)
{
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++;
}
int spfa()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
queue<int> q;
q.push(1);
st[1] = true;
while (q.size())
{
int t = q.front();
q.pop();
st[t] = false;
for (int i = h[t]; i != -1; i = ne[i])
{
int j = e[i];
if (dist[j] > dist[t] + w[i])
{
dist[j] = dist[t] + w[i];
if (!st[j])
{
q.push(j);
st[j] = true;
}
}
}
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}
int main()
{
cin >> n >> m;
memset(h, -1, sizeof h);
for (int i = 0; i < m; i ++)
{
int a, b, w;
cin >> a >> b >> w;
add(a, b, w);
}
int t = spfa();
if (t == -1) puts("impossible");
else cout << t << endl;
return 0;
}Floyd O(n^3)
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 210, INF = 1e9;
int n, m, Q;
int d[N][N];
void floyd()
{
for (int k = 1; k <= n; k ++)
for (int i = 1; i <= n; i ++)
for (int j = 1; j <= n; j ++)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
int main()
{
cin >> n >> m >> Q;
for (int i = 1; i <= n; i ++)
for (int j = 1; j <= n; j ++)
if (i == j) d[i][j] = 0;
else d[i][j] = INF;
while (m --)
{
int a, b, w;
cin >> a >> b >> w;
d[a][b] = min(d[a][b], w);
}
floyd();
while (Q --)
{
int a, b;
cin >> a >> b;
if (d[a][b] > INF / 2) puts("impossible");
else cout << d[a][b] << endl;
}
return 0;
}最小生成树
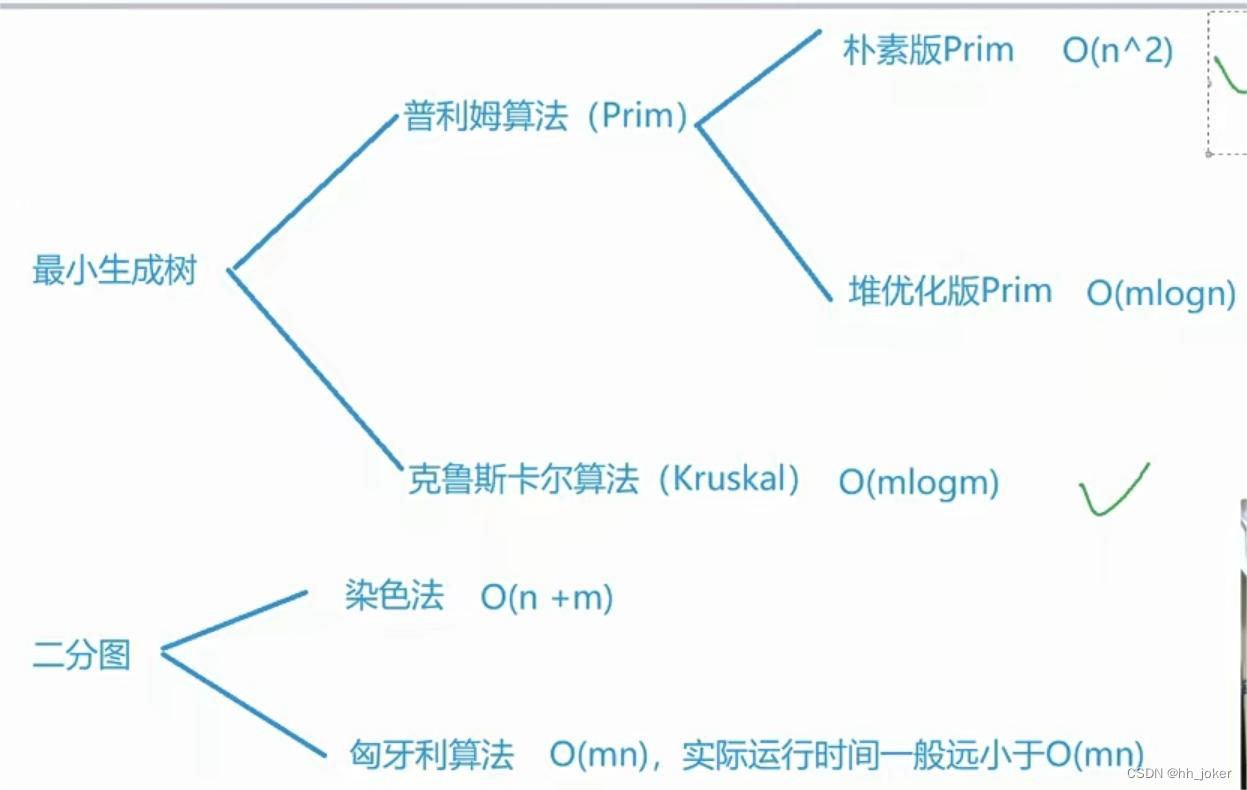
⭐Prim O(n^2)
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, INF = 0x3f3f3f3f;
int n, m;
int g[N][N];
int dist[N];
bool st[N];
int prim()
{
memset(dist, 0x3f, sizeof dist);
int res = 0;
for (int i = 0; i < n; i ++)
{
int t = -1;
for (int j = 1; j <= n; j ++)
if (!st[j] && (t == -1 || dist[t] > dist[j]))
t = j;
if (i && dist[t] == INF) return INF;
if (i) res += dist[t];
for (int j = 1; j <= n; j ++) dist[j] = min(dist[j], g[t][j]);
st[t] = true;
}
return res;
}
int main()
{
cin >> n >> m;
memset(g, 0x3f, sizeof g);
while (m --)
{
int a, b, c;
cin >> a >> b >> c;
g[a][b] = min (g[a][b], c);
}
int t = prim();
if (t == INF) puts("impossible");
else printf("%d\n", t);
return 0;
}堆优化版Prim O(mlogn)
略(参照 Dijkstra 与 堆优化版Dijkstra 算法)
⭐克鲁斯卡尔算法 O(mlogm)
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 100010;
int n, m;
int p[N];
struct Edge
{
int a, b, w;
bool operator< (const Edge &W)const
{
return w < W.w;
}
}edges[N];
int find(int x)
{
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
int main()
{
cin >> n >> m;
for (int i = 0; i < m; i ++)
{
int a, b, w;
cin >> a >> b >> w;
edges[i] = {a, b, w};
}
sort(edges, edges + m);
for (int i = 1; i <= n; i ++) p[i] = i;
int res = 0, cnt = 0;
for (int i = 0; i < m; i ++)
{
int a = edges[i].a, b = edges[i].b, w = edges[i].w;
a = find(a), b = find(b);
if (a != b)
{
p[a] = b;
res += w;
cnt ++;
}
}
if (cnt < n - 1) puts("impossible");
else printf("%d\n", res);
return 0;
}二分图
染色法 O(m + n) (注:此算法用于判断图是否为二分图)
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 100010, M = 200010;
int n, m;
int h[N], e[M], ne[M], idx;
int color[N];
void add(int a, int b)
{
e[idx] = b, ne[idx] = h[a], h[a] = idx ++;
}
bool dfs(int u, int c)
{
color[u] = c;
for (int i = h[u]; i != -1; i = ne[i])
{
int j = e[i];
if (!color[j])
{
if (!dfs(j, 3 - c)) return false;
}
else if (color[j] == c) return false;
}
return true;
}
int main()
{
cin >> n >> m;
memset(h, -1, sizeof h);
while (m --)
{
int a, b;
cin >> a >> b;
add(a, b), add(b, a);
}
bool flag = true;
for (int i = 1; i <= n; i ++)
if (!color[i])
{
if (!dfs(i, 1))
{
flag = false;
break;
}
}
if (flag) puts("Yes");
else puts("No");
return 0;
}匈牙利算法 (O(mn),实际运行时间一般远小于O(mn))(注:用于判断最大匹配数)
#include <cstring>
#include <iostream>
#include <algorithm>
using namespace std;
const int N = 510, M = 100010;
int n1, n2, m;
int h[N], e[N], ne[N], idx;
int match[N];
bool st[N];
void add(int a, int b)
{
e[idx] = b, ne[idx] = h[a], h[a] = idx ++;
}
bool find(int x)
{
for (int i = h[x]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j]))
{
match[j] = x;
return true;
}
}
}
return false;
}
int main()
{
cin >> n1 >> n2 >> m;
memset(h, -1, sizeof h);
while (m --)
{
int a, b;
cin >> a >> b;
add(a, b);
}
int res = 0;
for (int i = 1; i <= n1; i ++)
{
memset(st, false, sizeof st);
if (find(i)) res ++;
}
cout << res << endl;
return 0;
}














 581
581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









