






使用onnxruntime推理yolov5(C++)
开发环境:win11、vs2022
使用vs2022配置onnxruntime环境
1.下载onnxruntime nupkg包
下载地址link,根据自己的需求下载相应的版本。
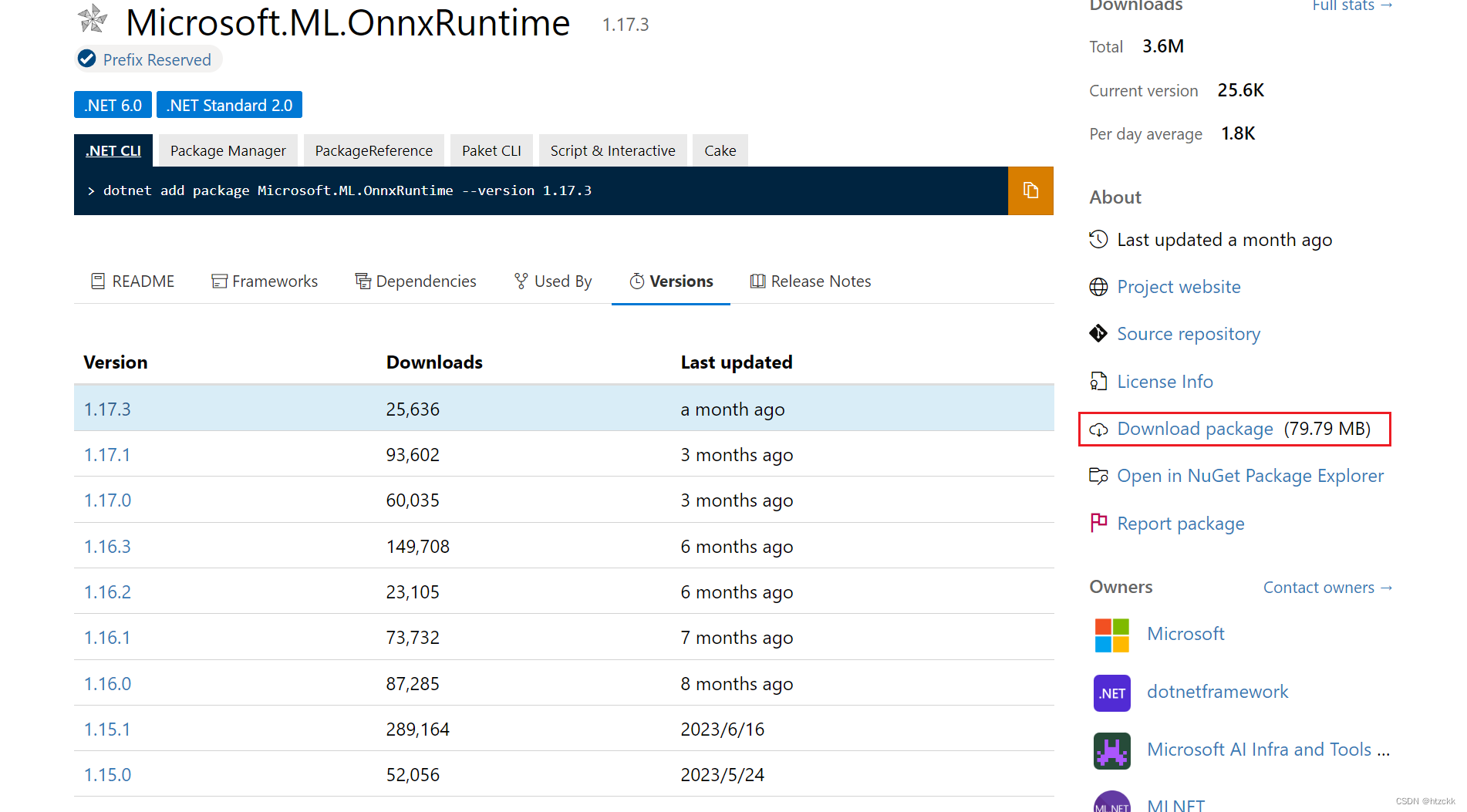
本文使用的的cpu版本,下载后将得到microsoft.ml.onnxruntime.1.17.3.nupkg文件保存到D:\onnxruntime文件夹内。
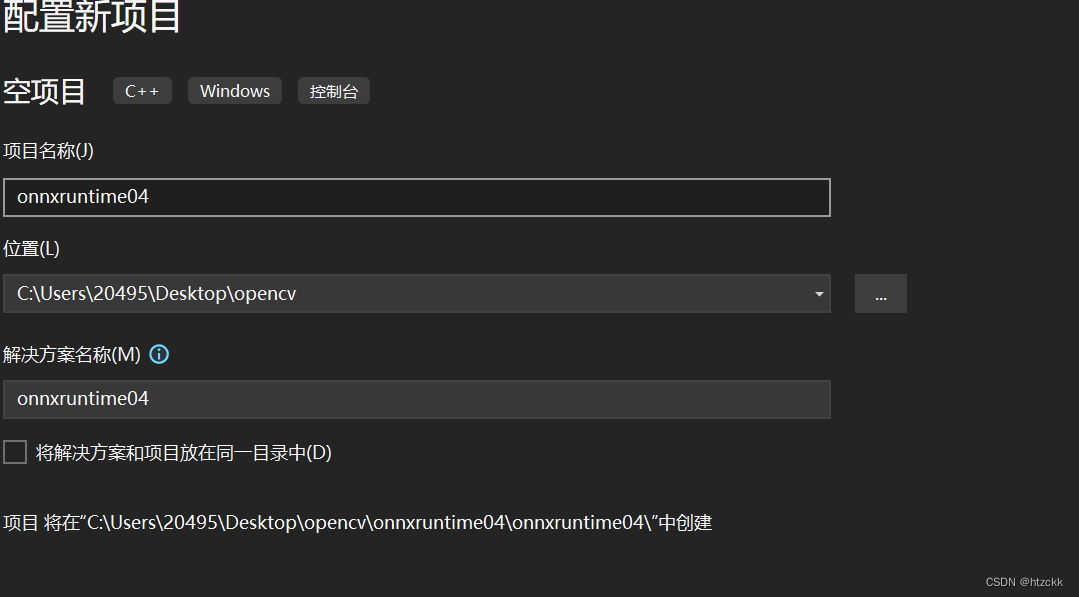
2.新建VS2022 C++空项目。
新建一个c++项目,名称为onnxruntime04
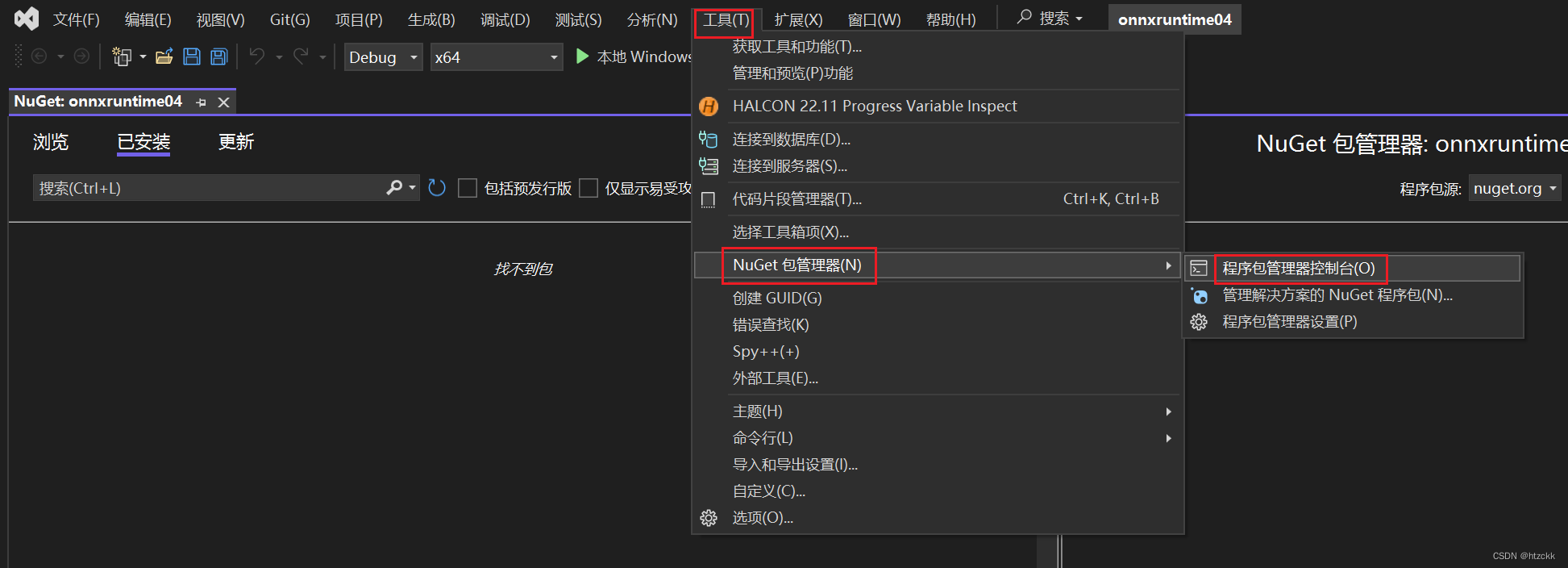
3.解析nupkg包
点击工具->NuGet管理包->程序包管理控制台
然后输入如下命令解析nupkg包,其中 D:\onnxruntime为自己下载的nupkg包存放路径,结果现在如下这表示成功解析。
Install-Package Microsoft.ML.OnnxRuntime -Source D:\onnxruntime
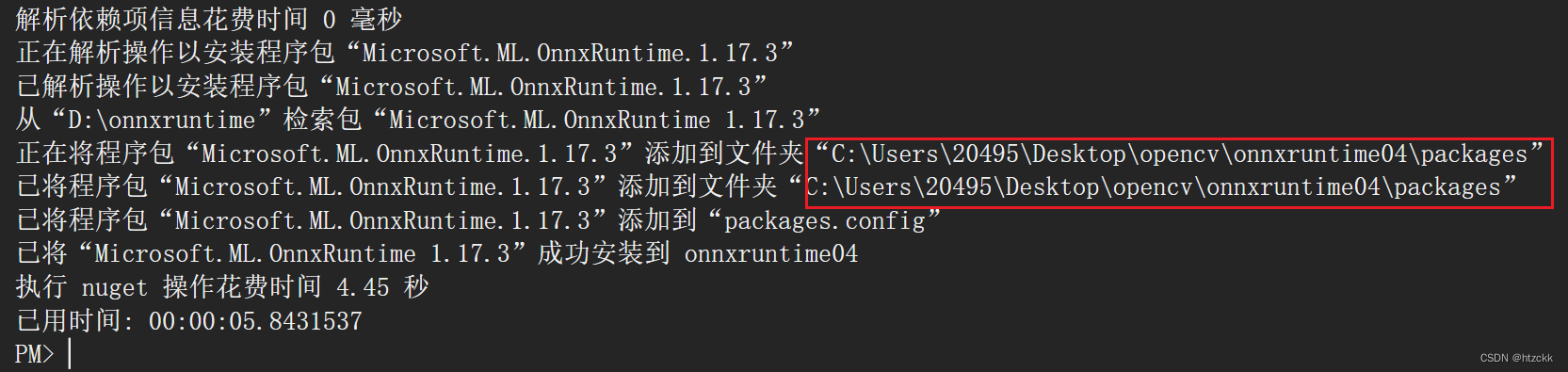
图中红色框路径下保存着我们所需要的头文件以及相应的动态库文件,一般情况和自己新建的VS2022 C++工程在同一目录下
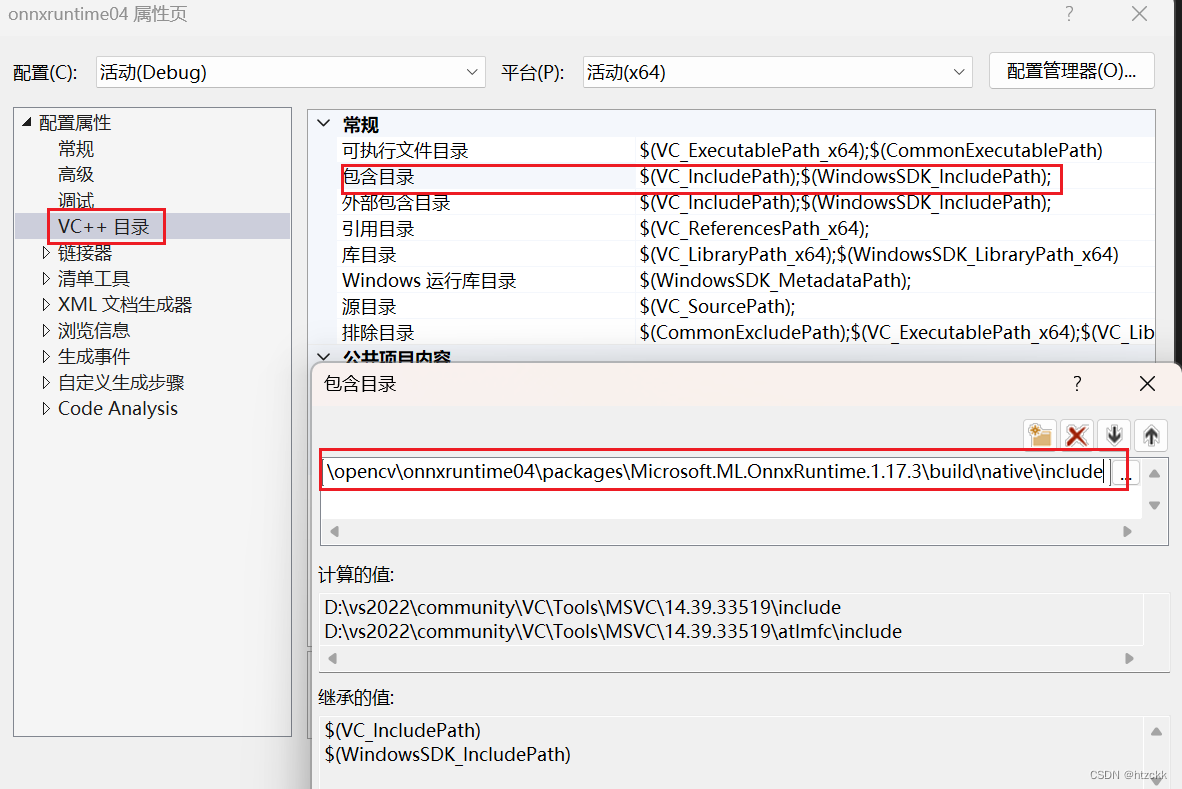
4.为项目配置onnxruntime开发环境
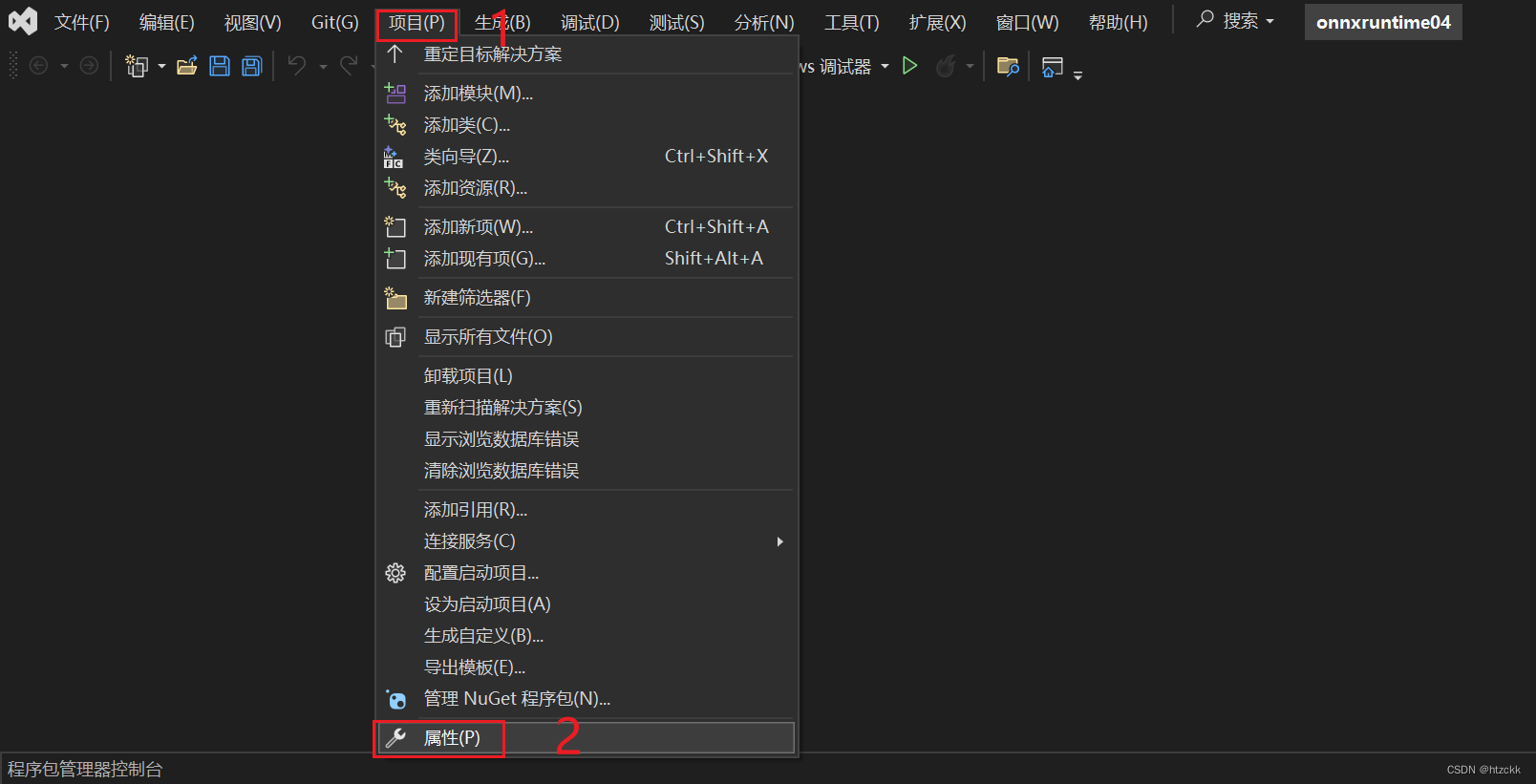
添加包含目录
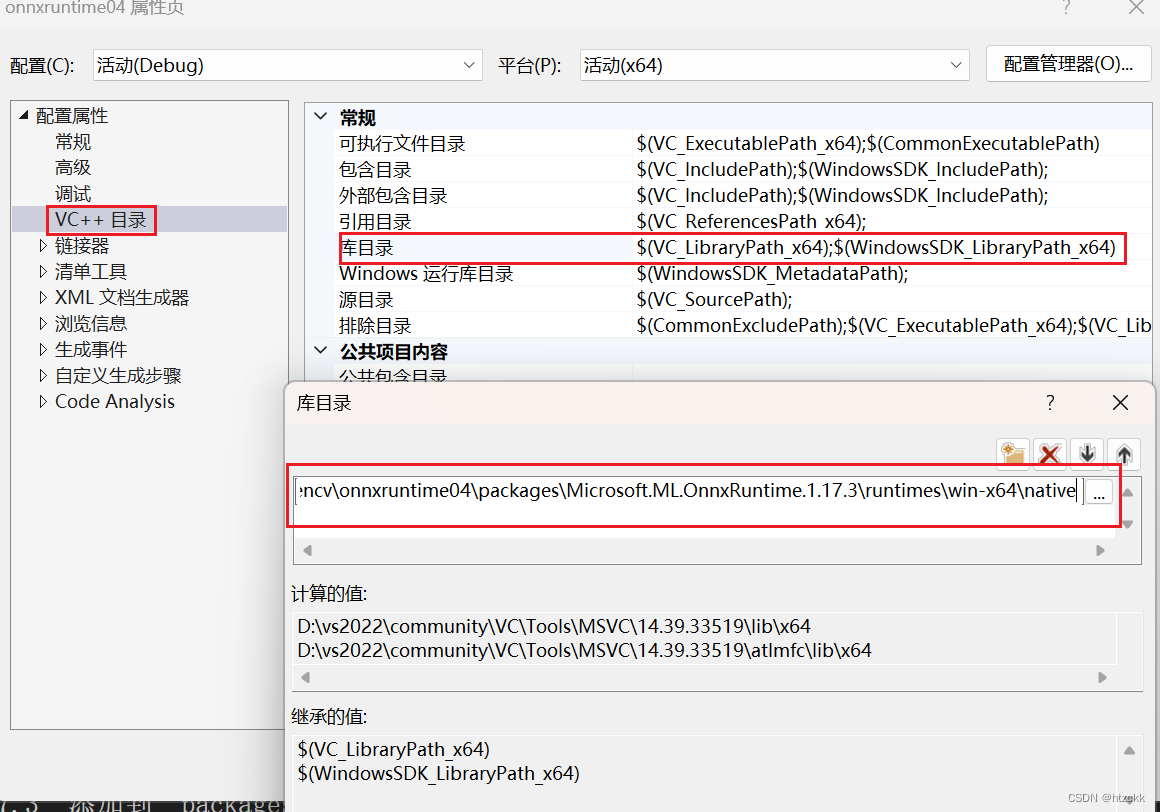
添加库目录
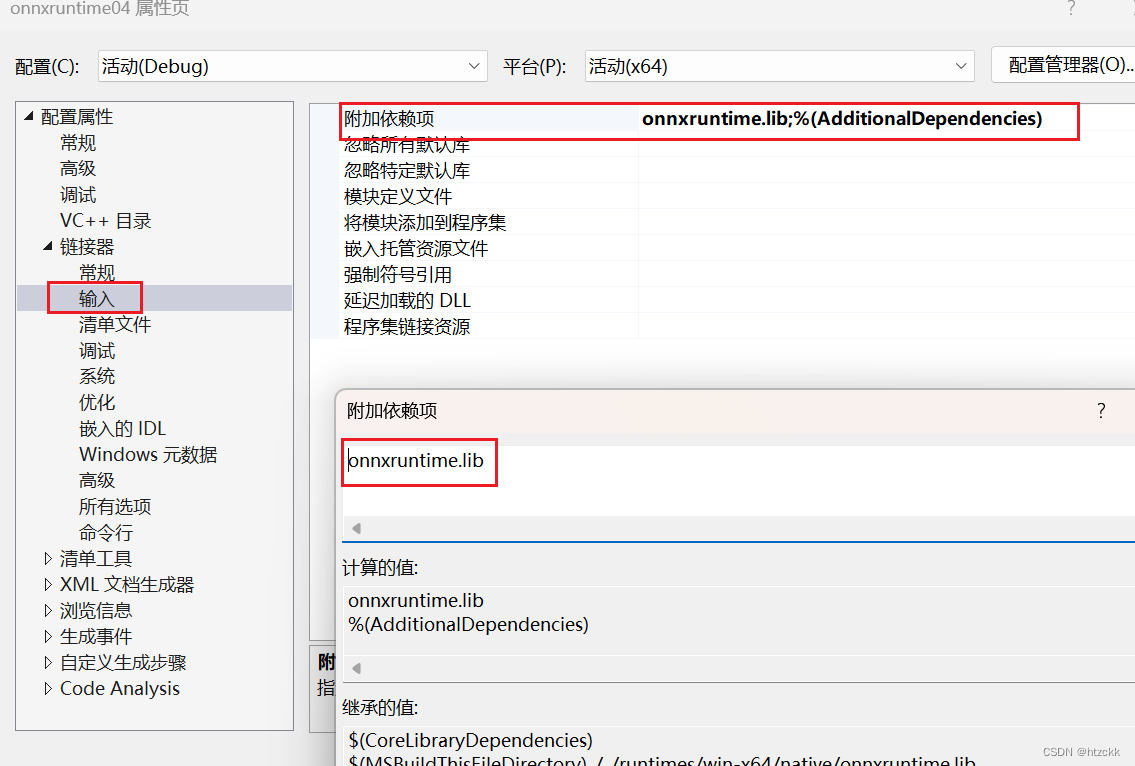
添加动态库文件
编写yolov5推理代码
创建yolov5.h、yolov5.cpp、main.cpp
头文件yolov5.h
#pragma once
#pragma once
#include <opencv2/opencv.hpp>
#include <onnxruntime_cxx_api.h>
#include <utility>
#include <codecvt>
#include <fstream>
//输出结构体
struct Output {
cv::Rect box;
float conf{};
int class_index{};
};
class YOLODetector
{
public:
explicit YOLODetector(std::nullptr_t) {};
YOLODetector(const std::string& modelPath,
const bool& isGPU,
const cv::Size& inputSize);
std::vector<Output> detect(cv::Mat& image, const float& confThreshold, const float& iouThreshold);
void draw(cv::Mat& image, std::vector<Output>& detections,
const std::vector<std::string>& classNames);
private:
Ort::Env env{ nullptr };
Ort::SessionOptions sessionOptions{ nullptr };
Ort::Session session{ nullptr };
void preprocessing(cv::Mat& image, float*& blob, cv::Vec4d& params, std::vector<int64_t>& inputTensorShape);
std::vector<Output> postprocessing(const cv::Size& resizedImageShape,
const cv::Size& originalImageShape,
std::vector<Ort::Value>& outputTensors,
const float& confThreshold, const float& iouThreshold,
cv::Vec4d& params);
void LetterBox(const cv::Mat& image, cv::Mat& outImage,
cv::Vec4d& params, //[ratiox,ratioy,dw,dh]
const cv::Size& newShape = cv::Size(640, 640),
bool autoShape = false,
bool scaleFill = false,
bool scaleUp = true,
int stride = 32,
const cv::Scalar& color = cv::Scalar(114, 114, 114));
std::wstring charToWstring(const char* str);
static void getBestClassInfo(std::vector<float>::iterator it, const int& numClasses,
float& bestConf, int& bestClassId);
size_t vectorProduct(const std::vector<int64_t>& vector);
std::vector<const char*> inputNames;
std::vector<const char*> outputNames;
bool isDynamicInputShape;
cv::Size2f inputImageShape;
};
namespace utils
{
std::vector<std::string> loadNames(const std::string& path);
}
源文件yolov5.cpp
#include"yolov5.h"
YOLODetector::YOLODetector(const std::string& modelPath,
const bool& isGPU = true,
const cv::Size& inputSize = cv::Size(640, 640))
{ //环境初始化
env = Ort::Env(OrtLoggingLevel::ORT_LOGGING_LEVEL_WARNING, "ONNX_DETECTION");
sessionOptions = Ort::SessionOptions();
sessionOptions.SetIntraOpNumThreads(4);//线程数
//检测GPU
std::vector<std::string> availableProviders = Ort::GetAvailableProviders();
auto cudaAvailable = std::find(availableProviders.begin(), availableProviders.end(), "CUDAExecutionProvider");
OrtCUDAProviderOptions cudaOption;
if (isGPU && (cudaAvailable == availableProviders.end()))
{
std::cout << "Inference device: CPU" << std::endl;
}
else if (isGPU && (cudaAvailable != availableProviders.end()))
{
std::cout << "Inference device: GPU" << std::endl;
sessionOptions.AppendExecutionProvider_CUDA(cudaOption);
}
else
{
std::cout << "Inference device: CPU" << std::endl;
}
#ifdef _WIN32
//
std::wstring w_modelPath = this->charToWstring(modelPath.c_str());
session = Ort::Session(env, w_modelPath.c_str(), sessionOptions);
#else
session = Ort::Session(env, modelPath.c_str(), sessionOptions);
#endif
Ort::TypeInfo inputTypeInfo = session.GetInputTypeInfo(0);
std::vector<int64_t> inputTensorShape = inputTypeInfo.GetTensorTypeAndShapeInfo().GetShape();
this->isDynamicInputShape = false;
// 检查是否是动态宽高
if (inputTensorShape[2] == -1 && inputTensorShape[3] == -1)
{
std::cout << "Dynamic input shape" << std::endl;
this->isDynamicInputShape = true;
}
for (auto shape : inputTensorShape)
std::cout << "Input shape: " << shape << std::endl;
this->inputImageShape = cv::Size2f(inputSize);
}
//前处理
void YOLODetector::preprocessing(cv::Mat& image, float*& blob, cv::Vec4d& params, std::vector<int64_t>& inputTensorShape)
{
cv::Mat resizedImage, floatImage;
cv::cvtColor(image, resizedImage, cv::COLOR_BGR2RGB);
YOLODetector::LetterBox(resizedImage, resizedImage,
params, this->inputImageShape,
this->isDynamicInputShape, false, true,
32, cv::Scalar(114, 114, 114));
inputTensorShape[2] = resizedImage.rows;
inputTensorShape[3] = resizedImage.cols;
resizedImage.convertTo(floatImage, CV_32FC3, 1 / 255.0);
blob = new float[floatImage.cols * floatImage.rows * floatImage.channels()];
cv::Size floatImageSize{ floatImage.cols, floatImage.rows };
// hwc to chw
std::vector<cv::Mat> chw(floatImage.channels());
for (int i = 0; i < floatImage.channels(); ++i)
{
chw[i] = cv::Mat(floatImageSize, CV_32FC1, blob + i * floatImageSize.width * floatImageSize.height);
}
cv::split(floatImage, chw);
}
//后处理
std::vector<Output> YOLODetector::postprocessing(const cv::Size& resizedImageShape,
const cv::Size& originalImageShape,
std::vector<Ort::Value>& outputTensors,
const float& confThreshold, const float& iouThreshold, cv::Vec4d& params)
{
std::vector<cv::Rect> boxes;
std::vector<float> confs;
std::vector<int> classIds;
auto* rawOutput = outputTensors[0].GetTensorData<float>();
std::vector<int64_t> outputShape = outputTensors[0].GetTensorTypeAndShapeInfo().GetShape();
size_t count = outputTensors[0].GetTensorTypeAndShapeInfo().GetElementCount();
std::vector<float> output(rawOutput, rawOutput + count);
int numClasses = (int)outputShape[2] - 5;
int elementsInBatch = (int)(outputShape[1] * outputShape[2]);
for (auto it = output.begin(); it != output.begin() + elementsInBatch; it += outputShape[2])
{
float clsConf = it[4];
if (clsConf > confThreshold)
{
int centerX = (int)(it[0] - params[2]) / params[0];
int centerY = (int)(it[1] - params[3]) / params[1];
int width = (int)(it[2]) / params[0];
int height = (int)(it[3] / params[1]);
int left = centerX - width / 2;
int top = centerY - height / 2;
float objConf;
int classId;
this->getBestClassInfo(it, numClasses, objConf, classId);
float confidence = clsConf * objConf;
boxes.emplace_back(left, top, width, height);
confs.emplace_back(confidence);
classIds.emplace_back(classId);
}
}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confs, confThreshold, iouThreshold, indices);
std::vector<Output> detections;
for (int idx : indices)
{
Output det;
det.box = cv::Rect(boxes[idx]);
det.conf = confs[idx];
det.class_index = classIds[idx];
detections.emplace_back(det);
}
return detections;
}
std::vector<Output> YOLODetector::detect(cv::Mat& image, const float& confThreshold = 0.4,
const float& iouThreshold = 0.45)
{
float* blob = nullptr;
cv::Vec4d params;
std::vector<int64_t> inputTensorShape{ 1, 3, -1, -1 };
this->preprocessing(image, blob, params, inputTensorShape);
//计算输出尺寸1x3x640x640
size_t inputTensorSize = this->vectorProduct(inputTensorShape);
std::vector<float> inputTensorValues(blob, blob + inputTensorSize);
std::vector<Ort::Value> inputTensors;
Ort::MemoryInfo memoryInfo = Ort::MemoryInfo::CreateCpu(
OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault);
inputTensors.push_back(Ort::Value::CreateTensor<float>(
memoryInfo, inputTensorValues.data(), inputTensorSize,
inputTensorShape.data(), inputTensorShape.size()
));
//获取输入阶段和输出节点名称
Ort::AllocatorWithDefaultOptions allocator;
Ort::AllocatedStringPtr input_name_Ptr = session.GetInputNameAllocated(0, allocator);
//std::cout << input_name_Ptr << std::endl;
inputNames.push_back(input_name_Ptr.get());
Ort::AllocatedStringPtr output_name_Ptr = session.GetOutputNameAllocated(0, allocator);
outputNames.push_back(output_name_Ptr.get());
const char* input_names[] = { inputNames[0] };
const char* output_names[] = { outputNames[0] };
std::cout << "Input name: " << inputNames[0] << std::endl;
std::cout << "Output name: " << outputNames[0] << std::endl;
std::vector<Ort::Value> outputTensors = this->session.Run(Ort::RunOptions{ nullptr },
input_names,
inputTensors.data(),
1,
output_names,
1);
cv::Size resizedShape = cv::Size((int)inputTensorShape[3], (int)inputTensorShape[2]);
std::vector<Output> result = this->postprocessing(resizedShape,
image.size(),
outputTensors,
confThreshold, iouThreshold, params);
delete[] blob;
return result;
}//并计算该向量(数组)中所有元素的乘积
size_t YOLODetector::vectorProduct(const std::vector<int64_t>& vector)
{
if (vector.empty())
return 0;
size_t product = 1;
for (const auto& element : vector)
product *= element;
return product;
}
//将一个以 char* 表示的 UTF-8 编码的字符串转换为 std::wstring宽字符
std::wstring YOLODetector::charToWstring(const char* str)
{
typedef std::codecvt_utf8<wchar_t> convert_type;
std::wstring_convert<convert_type, wchar_t> converter;
return converter.from_bytes(str);
}
void YOLODetector::draw(cv::Mat& image, std::vector<Output>& detections,
const std::vector<std::string>& classNames)
{
for (const Output& detection : detections)
{
cv::rectangle(image, detection.box, cv::Scalar(229, 160, 21), 2);
int x = detection.box.x;
int y = detection.box.y;
int conf = (int)std::round(detection.conf * 100);
int classId = detection.class_index;
std::string label = classNames[classId] + " 0." + std::to_string(conf);
int baseline = 0;
cv::Size size = cv::getTextSize(label, cv::FONT_ITALIC, 0.8, 2, &baseline);
cv::rectangle(image,
cv::Point(x, y - 25), cv::Point(x + size.width, y),
cv::Scalar(229, 160, 21), -1);
cv::putText(image, label,
cv::Point(x, y - 3), cv::FONT_ITALIC,
0.8, cv::Scalar(255, 255, 255), 2);
}
}
void YOLODetector::LetterBox(const cv::Mat& image, cv::Mat& outImage,
cv::Vec4d& params, const cv::Size& newShape,
bool autoShape, bool scaleFill, bool scaleUp,
int stride, const cv::Scalar& color)
{
cv::Size shape = image.size();
float r = std::min((float)newShape.height / (float)shape.height,
(float)newShape.width / (float)shape.width);
if (!scaleUp)
r = std::min(r, 1.0f);
float ratio[2]{ r, r };
int new_un_pad[2] = { (int)std::round((float)shape.width * r),(int)std::round((float)shape.height * r) };
auto dw = (float)(newShape.width - new_un_pad[0]);
auto dh = (float)(newShape.height - new_un_pad[1]);
if (autoShape)
{
dw = (float)((int)dw % stride);
dh = (float)((int)dh % stride);
}
else if (scaleFill)
{
dw = 0.0f;
dh = 0.0f;
new_un_pad[0] = newShape.width;
new_un_pad[1] = newShape.height;
ratio[0] = (float)newShape.width / (float)shape.width;
ratio[1] = (float)newShape.height / (float)shape.height;
}
dw /= 2.0f;
dh /= 2.0f;
if (shape.width != new_un_pad[0] && shape.height != new_un_pad[1])
{
cv::resize(image, outImage, cv::Size(new_un_pad[0], new_un_pad[1]));
}
else {
outImage = image.clone();
}
int top = int(std::round(dh - 0.1f));
int bottom = int(std::round(dh + 0.1f));
int left = int(std::round(dw - 0.1f));
int right = int(std::round(dw + 0.1f));
params[0] = ratio[0];
params[1] = ratio[1];
params[2] = left;
params[3] = top;
cv::copyMakeBorder(outImage, outImage, top, bottom, left, right, cv::BORDER_CONSTANT, color);
}
void YOLODetector::getBestClassInfo(std::vector<float>::iterator it, const int& numClasses,
float& bestConf, int& bestClassId)
{
bestClassId = 5;
bestConf = 0;
for (int i = 5; i < numClasses + 5; i++)
{
if (it[i] > bestConf)
{
bestConf = it[i];
bestClassId = i - 5;
}
}
}
//读取classname文件
std::vector<std::string> utils::loadNames(const std::string& path)
{
// load class names
std::vector<std::string> classNames;
std::ifstream infile(path);
if (infile.good())
{
std::string line;
while (getline(infile, line))
{
if (line.back() == '\r')
line.pop_back();
classNames.emplace_back(line);
}
infile.close();
}
else
{
std::cerr << "ERROR: Failed to access class name path: " << path << std::endl;
}
return classNames;
}
测试主程序main.cpp
#include <iostream>
#include <opencv2/opencv.hpp>
#include"yolov5.h"
int main(int argc, char* argv[])
{
const std::string classNamesPath = "C:\\Users\\20495\\Desktop\\opencv\\onnxruntime02\\onnxruntime02\\class.names";
const std::string imagePath = "C:\\Users\\20495\\Desktop\\opencv\\onnxruntime02\\onnxruntime02\\bus.jpg";
const std::string modelPath = "C:\\Users\\20495\\Desktop\\opencv\\onnxruntime02\\onnxruntime02\\sim_yolov5s.onnx";
const float confThreshold = 0.3f;
const float iouThreshold = 0.4f;
bool isGPU = false;
const std::vector<std::string> classNames = utils::loadNames(classNamesPath);
if (classNames.empty())
{
std::cerr << "Error: Empty class names file." << std::endl;
return -1;
}
YOLODetector detector{ nullptr };
cv::Mat image;
std::vector<Output> result;
try
{
detector = YOLODetector(modelPath, isGPU, cv::Size(640, 640));
std::cout << "Model was initialized." << std::endl;
image = cv::imread(imagePath);
auto start = std::chrono::high_resolution_clock::now();
result = detector.detect(image, confThreshold, iouThreshold);
auto end = std::chrono::high_resolution_clock::now();
auto duration = std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count();
std::cout << "推理时间:" << duration << "ms" << std::endl;
}
catch (const std::exception& e)
{
std::cerr << e.what() << std::endl;
return -1;
}
detector.draw(image, result, classNames);
cv::imshow("result", image);
cv::waitKey(0);
system("pause");
return 0;
}
报错解决
运行调试时,可能会报找不到 onnxruntime.dll 的报错,将onnxruntime.dll文件复制到和可执行文件同意目录下。















 1943
1943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









