




QMI概述
QMI是高通提供的一种多处理器进程间通信的功能接口,用于AP和BP侧的交互,通俗说法就是让终端设备TE(可以是手机,PDA,计算机)对高通BP侧的AMSS系统进行操作,如调用函数,读取数据,设置其中的NV项等。
其具有的特点如下:
- 具有同步和异步接口;
- 支持在在多个处理器之间进行通信;
- 良好的可扩展性;
- 支持多客户端并发运行;
- 支持多个服务端并发运行,且每个服务端还对应多个客户端;
- 每个服务端还支持版本信息;
QMI的消息路由通过IPC Router来完成,IPC路由器是一个面向消息(message-oriented)的路由器,用于支持Qualcomm commo client interface(QCCI)以及Qualcomm common service interface(QCSI)。
QCCI是一套用于客户端从服务器接收信息或者发送消息到服务器的API集合。
QCSI则是与QMI IDL(interface definition language)自动编译生成的代码一起使用,用于接收客户端的请求及对其作出响应。另外,它也用来发送指示消息(indication message)以及对消息进行编解码(encode/decode),这个消息由server端主动发出。
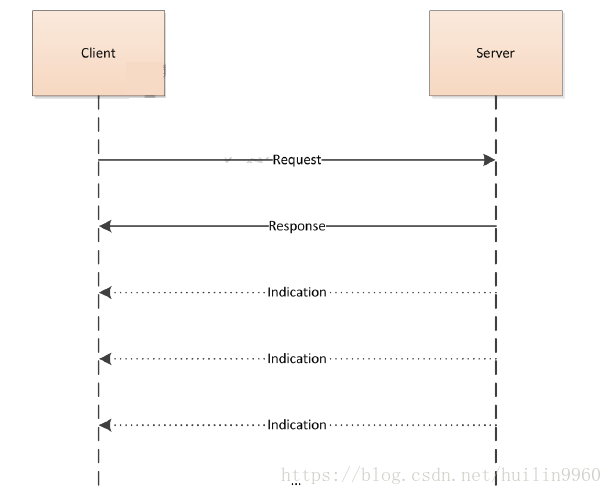
每一个服务都对应于一个service.idl的文件定义。.idl文件定义了每一个massage相关的常量,枚举类型以及和消息相关的数据结构。消息的类型有如下三种:
Request message ——一条request消息由客户端发往服务端,并由服务端进行处理。
Reponse message——每一个request的消息都会有一个reponse消息与之对应,类似于一个函数的返回值。如果请求消息等效于调用函数,则响应消息等效于返回给调用方的结果。
Indiction message——这类消息是由服务端发给客户端的异步消息。sensor1 API的规范要求:在任何indication message发送之前,客户端首先需要通过request message与服务端建立连接。indication消息可以在任何时候发送。
客户端与服务端的消息发送形式如下:
请求QMI消息
每一个server都应该支持如下的消息请求,每一条消息都有固定的消息ID,当每一个服务定义了以后,都需要在第一条定义一个cancel的消息类型,第二条为version 的消息。
service {
//! @ID <service-name>_CANCEL
sns_common_cancel_req_msg <service-name>_CANCEL_REQ,
sns_common_cancel_resp_msg <service-name>_CANCEL_RESP
= 0x00; // msg ID 0
//! @ID <service-name>_VERSION
sns_common_version_req_msg <service-name>_VERSION_REQ,
sns_common_version_resp_msg <service-name>_VERSION_RESP
= 0x01; // msg ID 1
… <other service messages go here> …
} = <service-name>_SERVICE_ID;取消所有的请求cancel msg(message id = 0)
该条消息类型用于取消该客户端与指定服务端的所有消息请求。当该消息请求发送到服务端,服务端将会deregister所有未完成的请求,并且停止向客户端发送indication message。
该消息体可以为null,且reponse消息会携带成功码
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 6578
6578

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









