






一、硬件构成
1、Jetson nano开发板,4GB显存
2、红外感应传感器
3、摄像头
二、具体实现
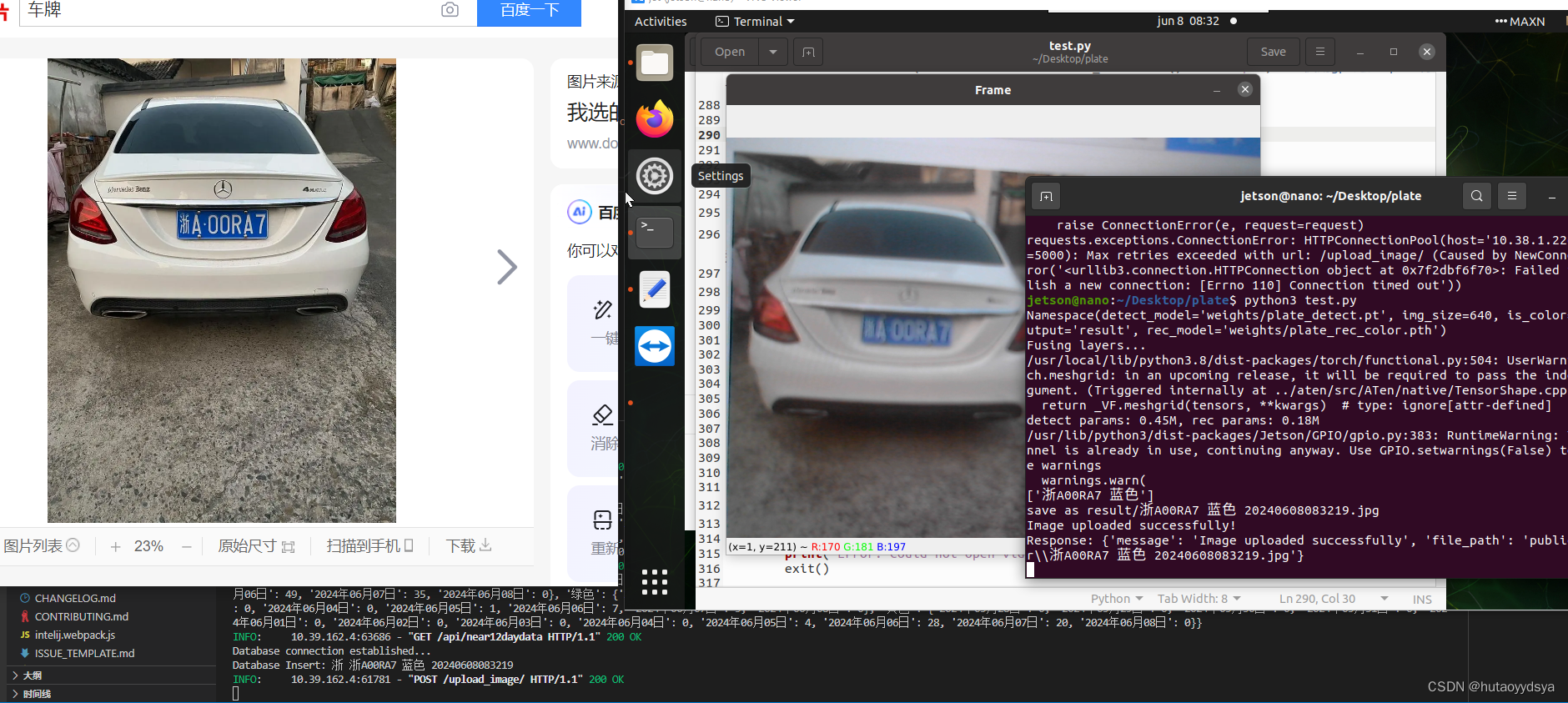
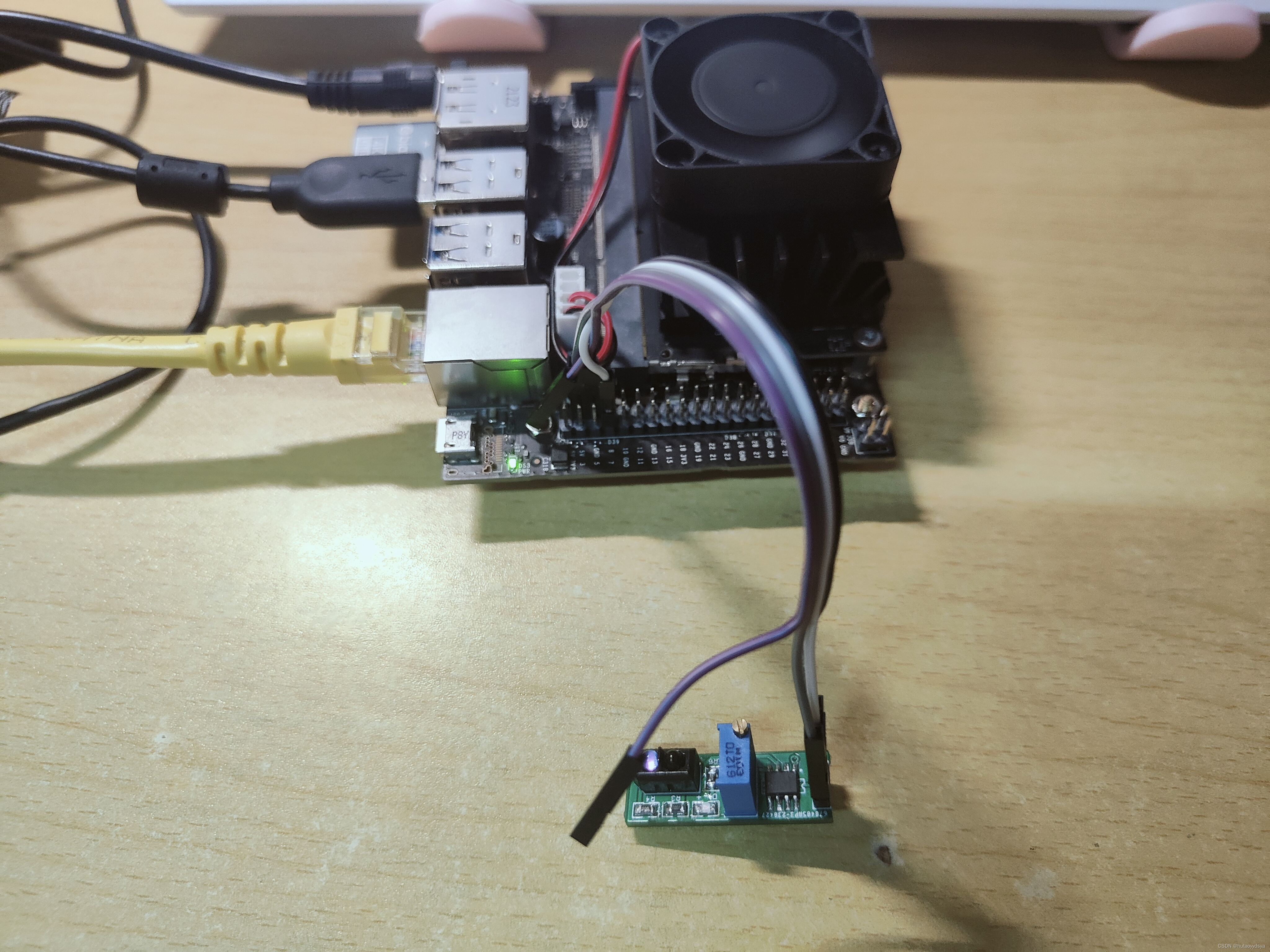
将电脑与Jetson nano通过网线共享连接,开发板Pin7口连接一个红外感应传感器,当模拟汽车接近时,将会在Pin7口输入低电平;此时,开发板就拍照,识别车牌号,将检测后的结果通过POST将图片和识别结果发送到后端;后端接收到图片和结果,将图片以车牌号_车牌颜色_识别时间进行保存,同时,将收到的检测结果写入sqlite数据库;前端通过vue实现,向fastapi后端请求每种颜色最近12天的日流量、最近6小时的车流量、车牌最多的5个省份的数量、各种颜色车牌统计,后端通过数据库查询返回前端;另外,前端的历史检测页将读取本地图片,显示历史检测照片。
三、实现内容
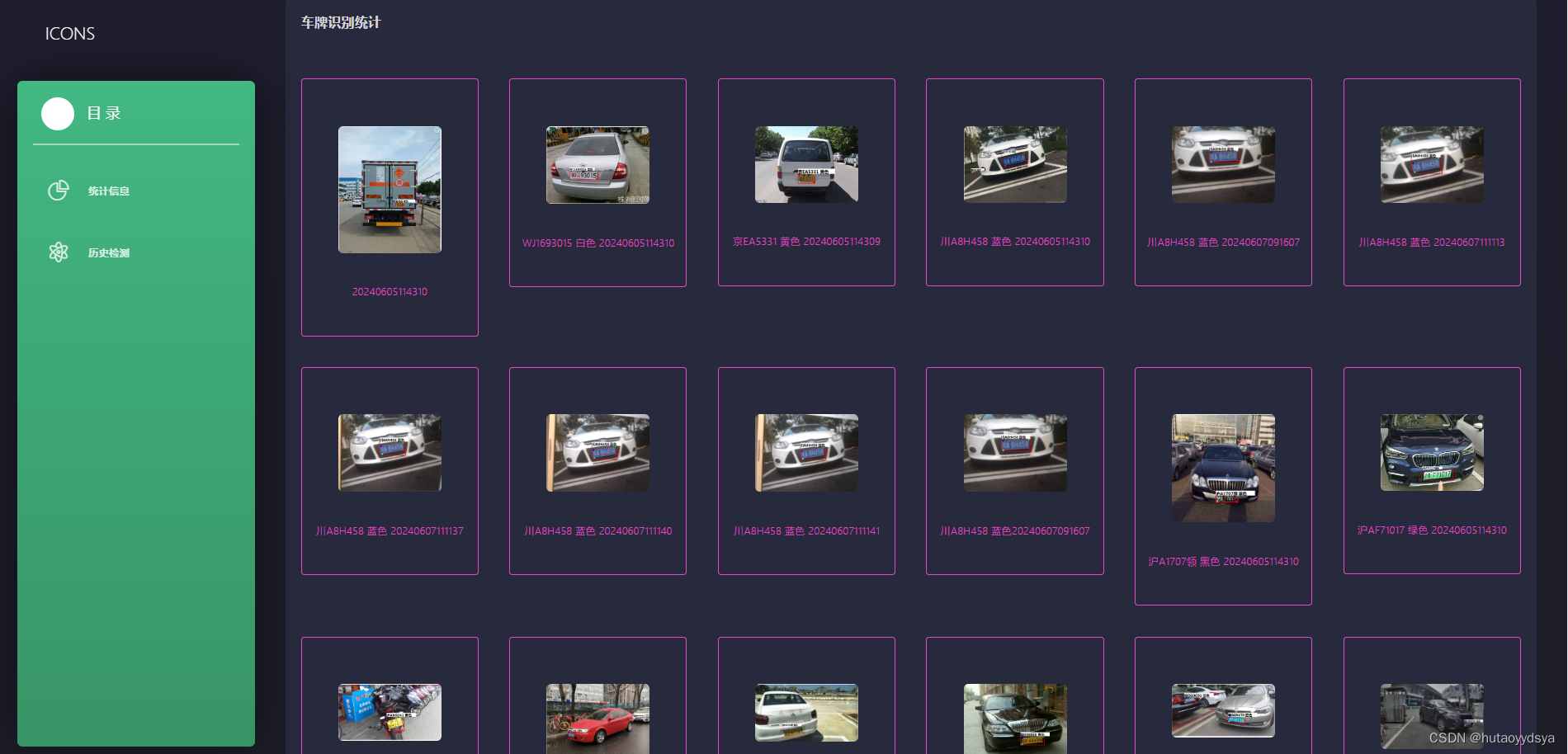
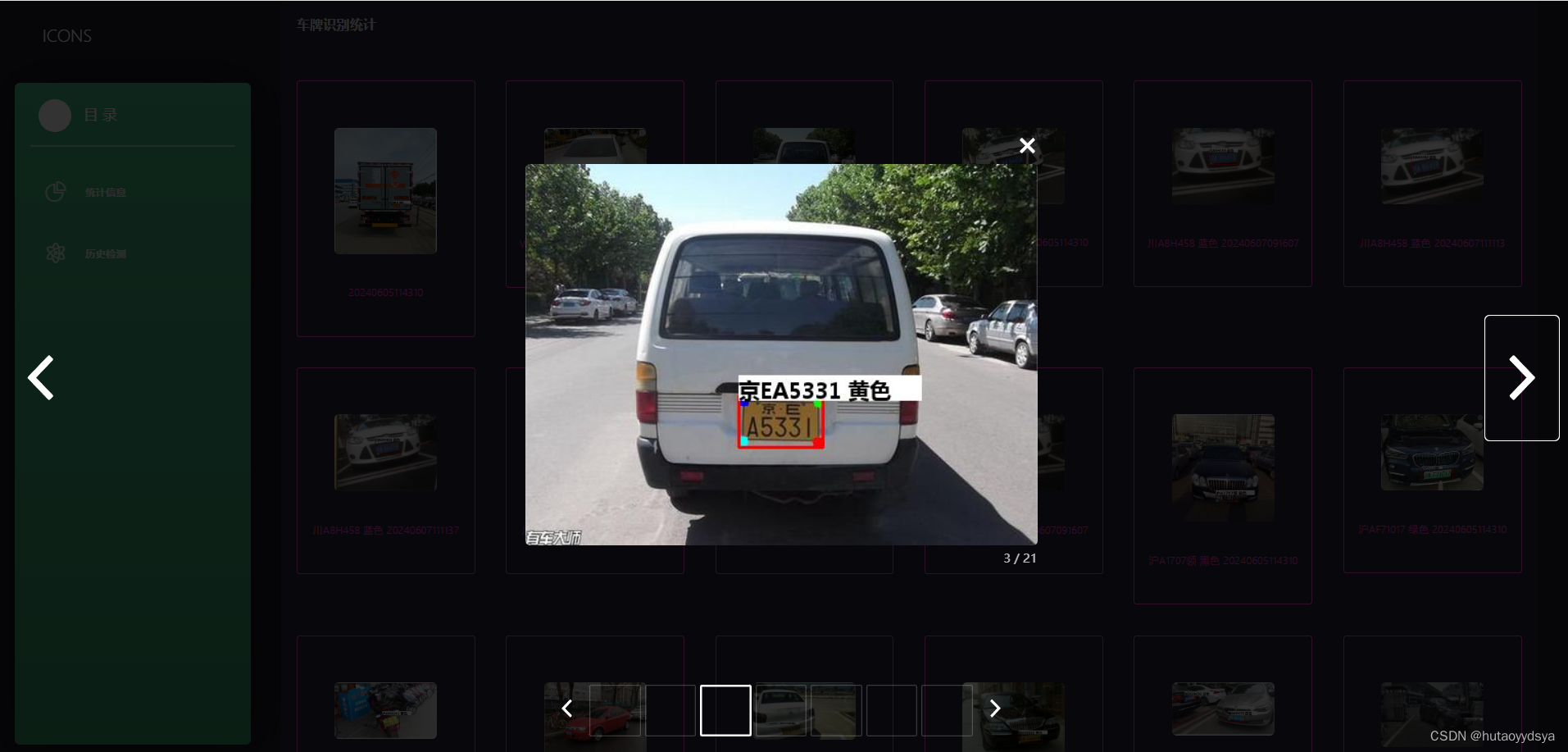
1、前端

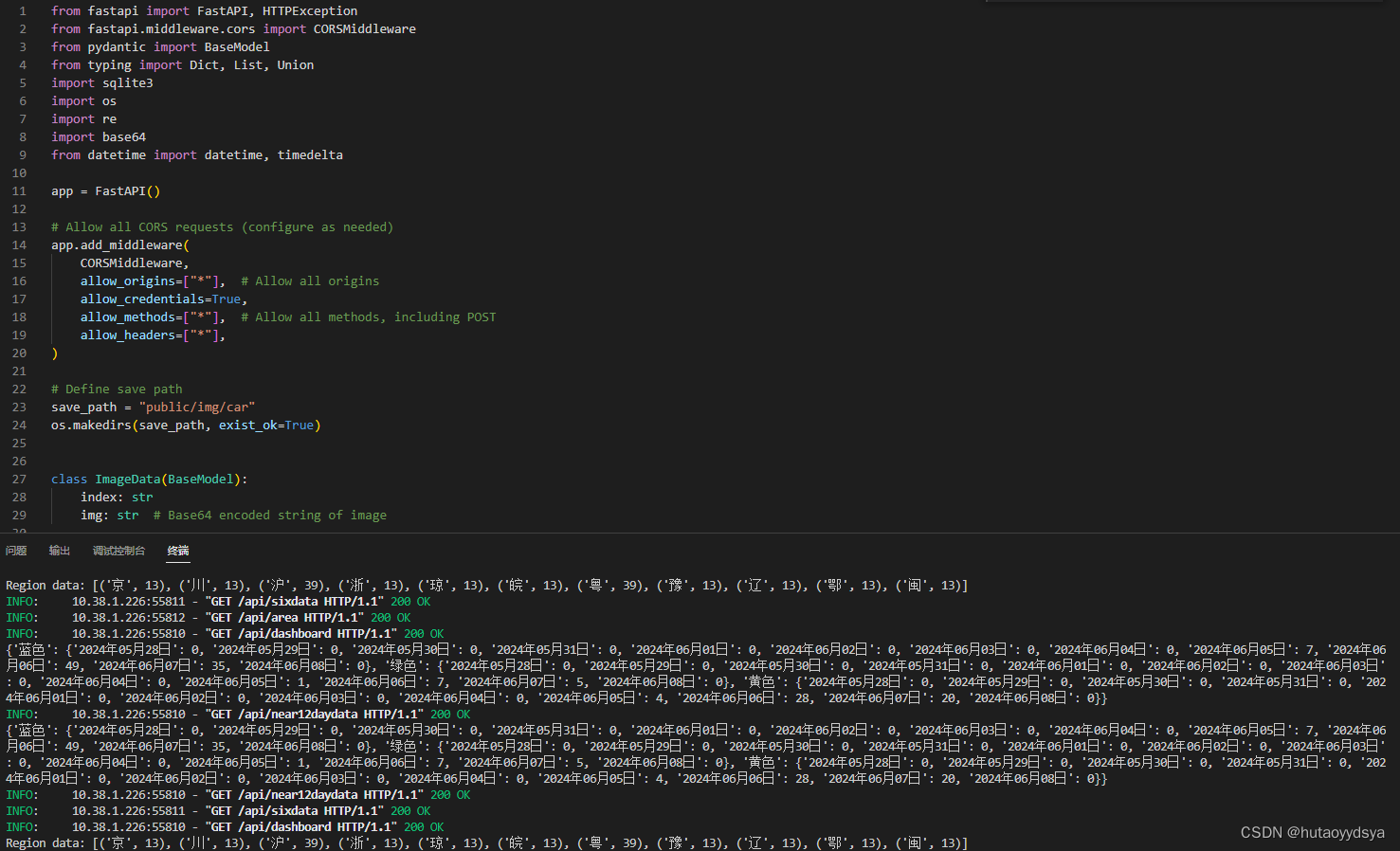
2、后端
3、Jetson nano端
4、硬件连接















 461
461











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









