







1. 设置编码
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2.设置软件源
sudo apt update && sudo apt install curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
3.安装ROS2
sudo apt update
sudo apt install ros-foxy-desktop

4.设置环境变量
source /opt/ros/foxy/setup.bash
如果有安装ROS1,会提示一个警告
![]()
5.安装自动补全工具
sudo apt install python3-argcomplete
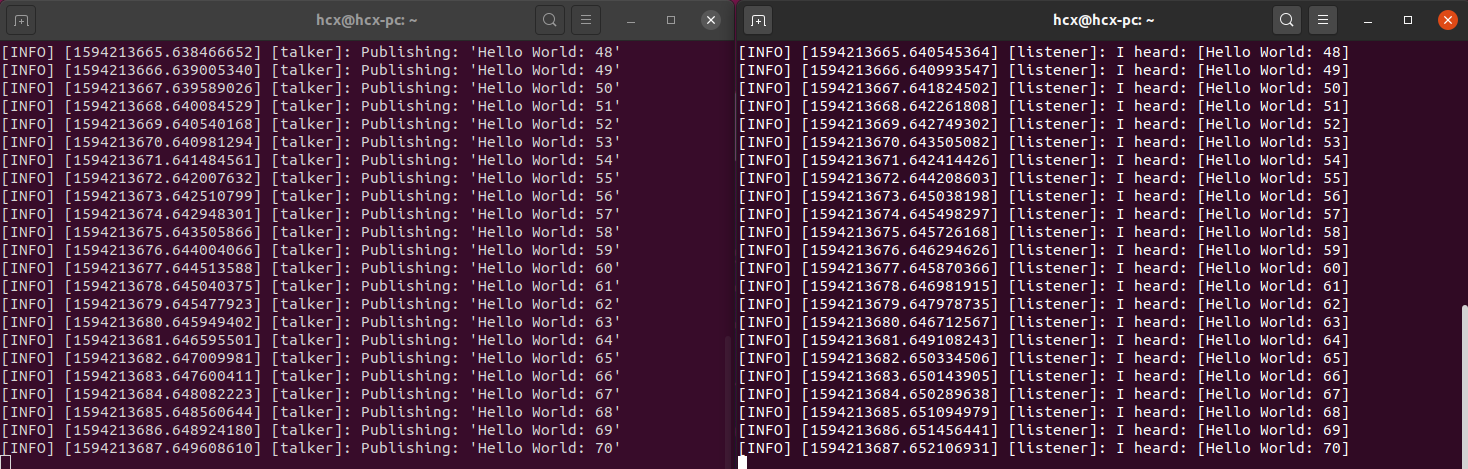
跑几个例程测试一下: 先运行一个talker:
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_cpp talker
再运行一个Listener
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_py listener
sudo apt update
sudo apt install ros-foxy-rmw-connext-cpp # for RTI Connext (requires license agreement)
RMW_IMPLEMENTATION=rmw_connext_cpp
sudo apt remove ros-foxy-* && sudo apt autoremove
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











