







暑假刚刚学完《机器人学导论》的第八章有关机器人视觉处理和分析方面的知识,现总结一下。
此书在这章只是对一些图像的处理和分析做一些简单的介绍并不做完整的介绍,先对其中一些概念进行说明和拓宽。
1,在处理过程中我们为了获取信息何时需要二维图像,何时需要三维图像这是一个决策的问题先从成像原理说起,先介绍小孔成像的原理。
如下图1所示,它由一个盒子,其前部有一个能透光的针孔O,以O点建立卡笛尔坐标系先考虑场景中的一点P(图中未注明),其坐标为(X,Y,Z),P投影到小盒子里面与P对应的一点P'(图中未注明),其坐标为(x,y,z),其中f是针孔到投影平面的距离,L是针孔到十字架的距离,根据几何学原理则有

可推出

可见在f不变的情况下其L越大其像的分辨率越小,反之则越大;在L不变的情况下f越大其像的分辨率越大,反之则越小。如果保存f与L都不变,小孔的直径增加则会产生多个投影,从而造成分辨率下降。当小孔直径减小图像可能会更清晰,但当当其进一步减小时可能会发生干涉现象。
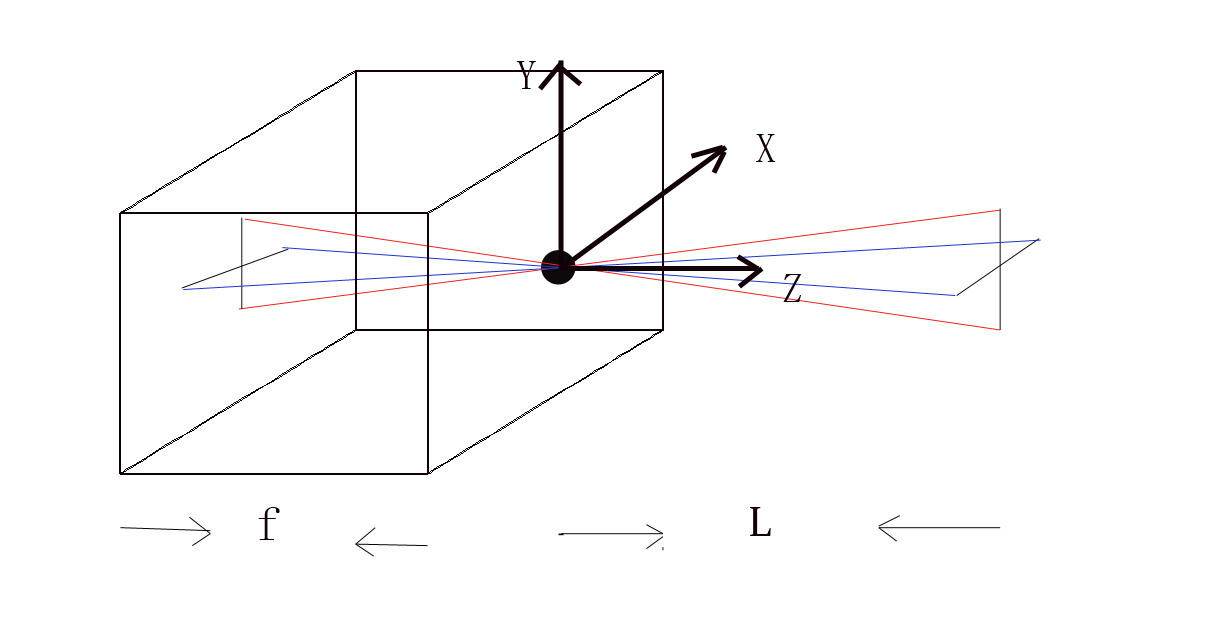
图1小孔成像
关于小孔成像的原理是基于光的直线传播定律,在实际生活中,我们认为十字架的每个地方都有光的照射并且在相对于物体的点的每一个点的每
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5830
5830











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









