






基于pid控制的超车轨迹跟踪,能够很好的跟踪期望轨迹。
有详细的说明文档
ID:5530682075434178
想剁手书屋14
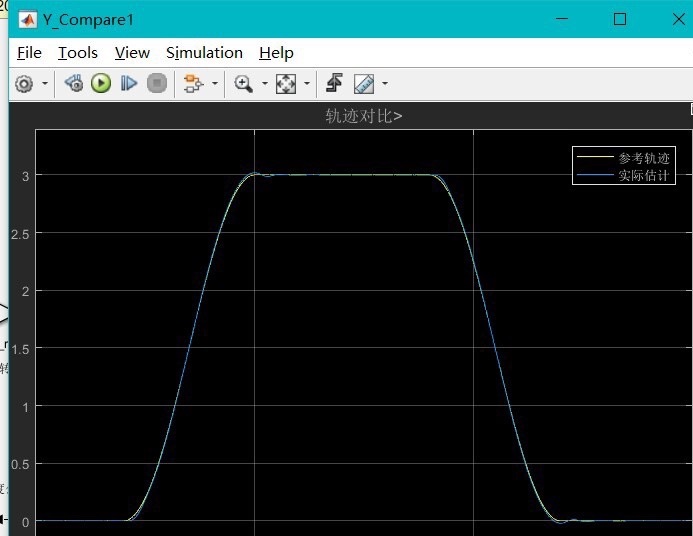
基于PID控制的超车轨迹跟踪是一种有效的控制策略,它能够精确地跟踪期望的轨迹。PID控制器是一种常见的反馈控制器,它基于误差信号来调整控制输出,以实现系统的稳定性和精确性。
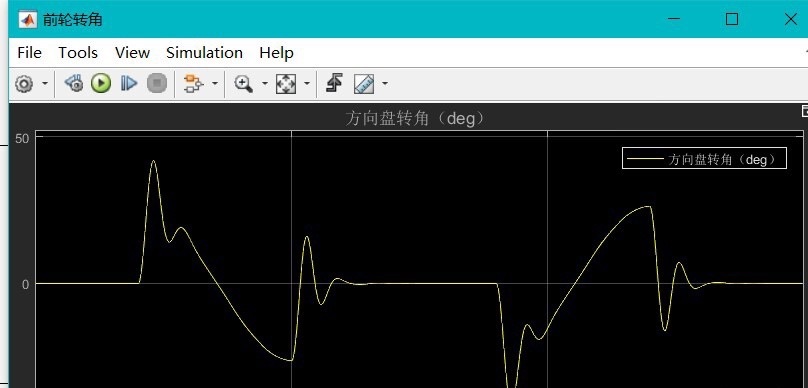
在超车过程中,车辆需要根据预设的轨迹线来行驶。通过PID控制器,车辆能够根据当前位置与期望位置之间的误差来调整方向盘和油门的控制输入,以实现精确的轨迹跟踪。PID控制器的核心思想是根据误差信号的大小来调整控制输出的比例、积分和微分部分,从而使车辆能够快速而准确地跟踪期望轨迹。
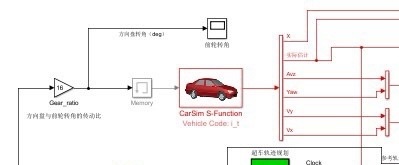
在设计PID控制器之前,需要先进行系统建模和参数估计。对于超车轨迹跟踪,可以使用车辆动力学模型来描述车辆的运动特性,并利用实测数据来估计模型的参数。通过系统建模和参数估计,可以建立准确的车辆模型,为PID控制器的设计提供基础。
PID控制器的设计需要仔细选择合适的控制参数。比例增益决定了控制量与误差之间的线性关系,积分时间常数决定了控制器对误差的积分作用,微分时间常数决定了控制器对误差变化率的敏感性。通过合理选择控制参数,可以使PID控制器具有良好的动态性能和鲁棒性。
在轨迹跟踪过程中,PID控制器需要实时地计算控制输出,并通过车辆的操纵系统来执行控制指令。为了提高轨迹跟踪的精度和鲁棒性,可以结合其他控制策略,如模型预测控制或优化控制。这些控制策略可以进一步改善系统的性能,并在复杂的驾驶情况下提供更好的稳定性和鲁棒性。
除了PID控制器的设计和实现,详细的说明文档也是非常重要的。说明文档应包括系统的动力学模型、参数估计方法、PID控制器的设计原理和步骤,以及实验结果和分析。通过详细的说明文档,可以帮助其他开发者理解和复现超车轨迹跟踪系统,并在实际应用中进行适当的改进和调整。
总之,基于PID控制的超车轨迹跟踪是一种有效的控制策略,它能够精确地跟踪期望的轨迹。通过系统建模、参数估计和PID控制器的设计,车辆能够在超车过程中实现精确而稳定的轨迹跟踪。详细的说明文档能够帮助其他开发者理解和应用该控制策略,在实际应用中取得良好的效果。
【相关代码 程序地址】: http://nodep.cn/682075434178.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









