






25混合A星算法路径规划Hybrid-Astar
以车辆的运动学模型为节点,以当前点到终点的Astar距离和RS距离两者最大的距离作为H(n)函数的估计代价,使用matlab实现(2016a以上版本)
ID:6910709290644909
左海平稳的芥兰
在现代交通工具的发展中,车辆路径规划一直是一个重要而复杂的问题。路径规划算法的目标是找到一条最优的路径,使得车辆从起点到达终点的时间和距离最小化。在这个领域,混合A星算法是一种被广泛研究和应用的技术。
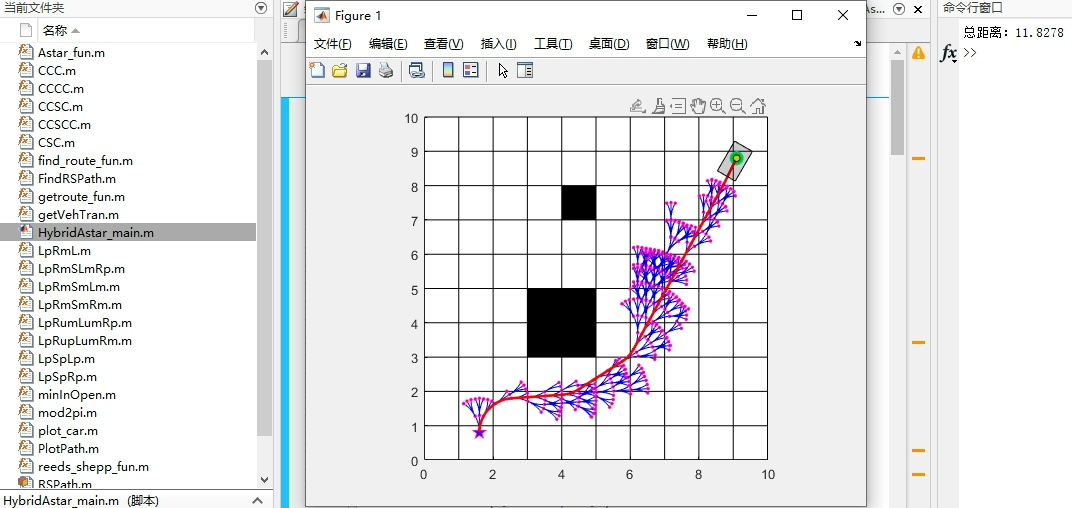
混合A星算法是一种结合了A星算法和RS距离的路径规划算法。A星算法是一种基于图的搜索算法,通过评估节点的代价函数来找到最优路径。而RS距离是一种用于估计节点之间距离的启发式算法。混合A星算法将二者结合起来,以车辆的运动学模型为节点,以当前点到终点的Astar距离和RS距离两者最大的距离作为H(n)函数的估计代价。
混合A星算法的实现可以使用matlab。matlab是一种强大的科学计算软件,其在路径规划领域有着广泛的应用。在使用matlab实现混合A星算法时,最好选择2016a以上版本,这样可以获得更好的性能和功能。
在实施混合A星算法之前,首先需要定义车辆的运动学模型。运动学模型描述了车辆在路径规划中的移动方式和约束条件。这个模型将作为混合A星算法中的节点,用来表示车辆在路径上的位置和状态。
接下来,需要定义代价函数和H(n)函数。代价函数用于评估节点的优劣,以决定搜索的方向和路径选择。H(n)函数是混合A星算法中的启发式函数,用来估计节点到终点的距离。在混合A星算法中,H(n)函数的取值是当前节点到终点的Astar距离和RS距离两者中的最大值。
实施混合A星算法的过程中,需要明确起点和终点的位置,并根据车辆运动学模型的约束条件和代价函数进行搜索。搜索过程中,每个节点都会被评估,并根据代价函数得到一个优先级。根据优先级,混合A星算法选择下一个节点进行搜索,直到找到最优路径或者搜索到达终点。
混合A星算法的优点在于兼顾了A星算法和RS距离的优势。A星算法能够快速找到路径,但是在复杂环境中容易受到局部最优解的影响。而RS距离能够提供更准确的距离估计,但是计算复杂度较高。混合A星算法通过结合二者,既能够快速搜索路径,又能够得到更准确的路径。
总之,混合A星算法是一种用于车辆路径规划的有效算法。通过结合A星算法和RS距离,混合A星算法能够在复杂环境中找到最优路径。使用matlab实现混合A星算法,可以得到高效且准确的路径规划结果。在未来的交通工具发展中,混合A星算法将继续发挥重要作用,为车辆提供更优质的路径规划服务。
(本文所述技术仅为理论分析,具体实施方法请参考相关文献和资料)
【相关代码,程序地址】:http://fansik.cn/709290644909.html
















 547
547











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









