






西门子1200plc轴运动控制程序模板
介绍:此程序是之前给海康威视做的一台装路由器壳子的机器。
程序有以下:
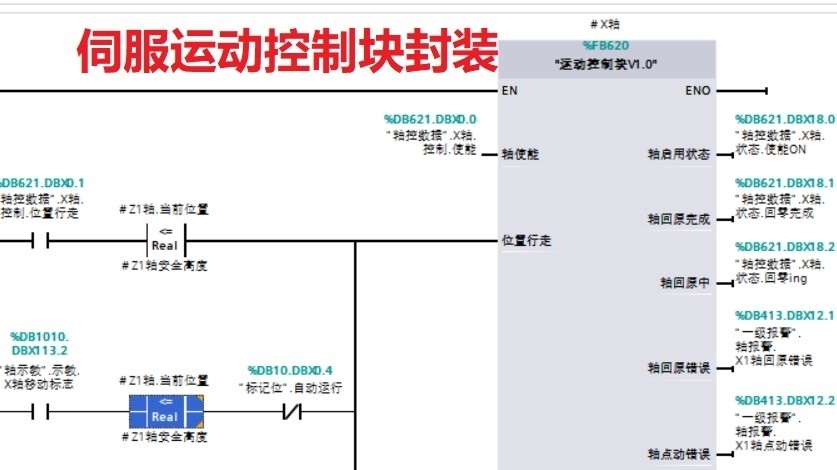
1):调用轴控制块做的控制3个伺服,
2):1个电缸,
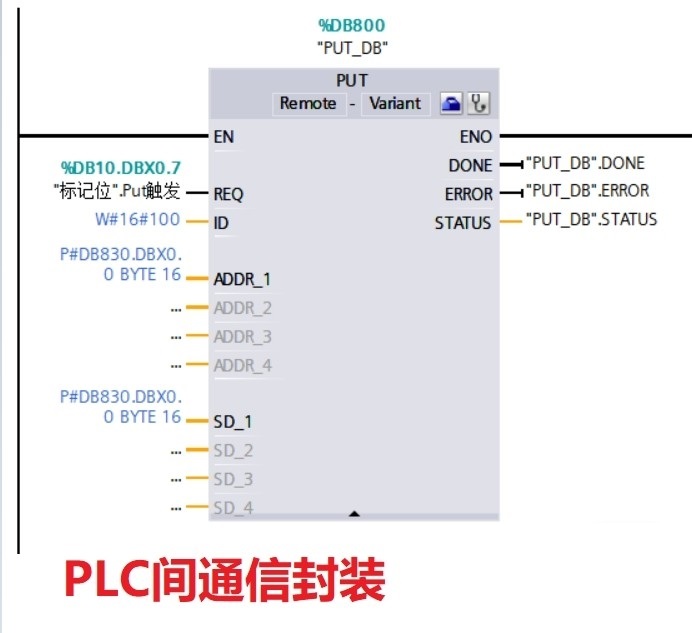
3):用PUT GET块与上下游plc通讯,
4):轴控制块
5):气缸报警块
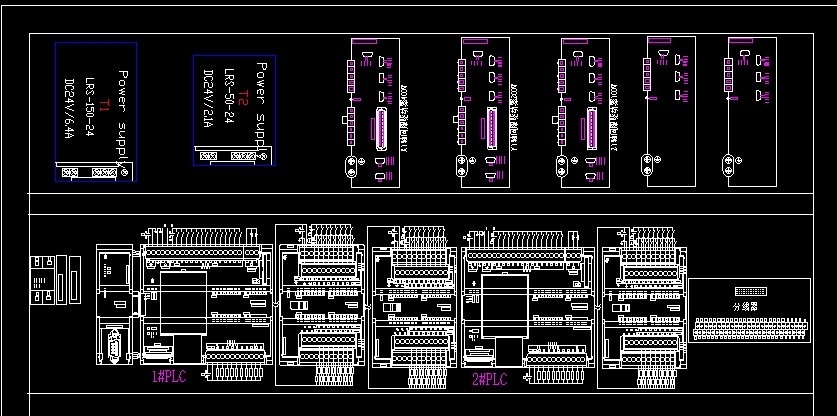
6):完整的电路图
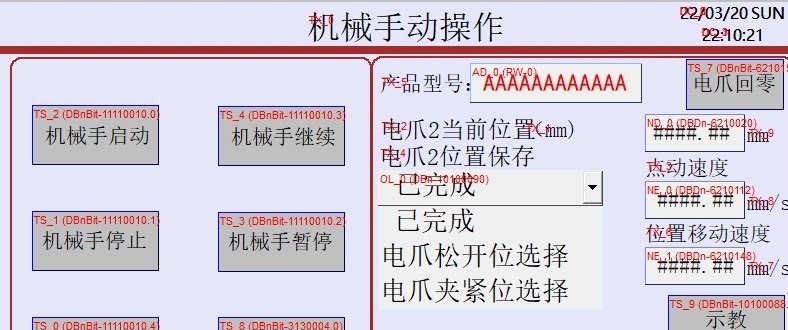
7):威纶通触摸屏程序
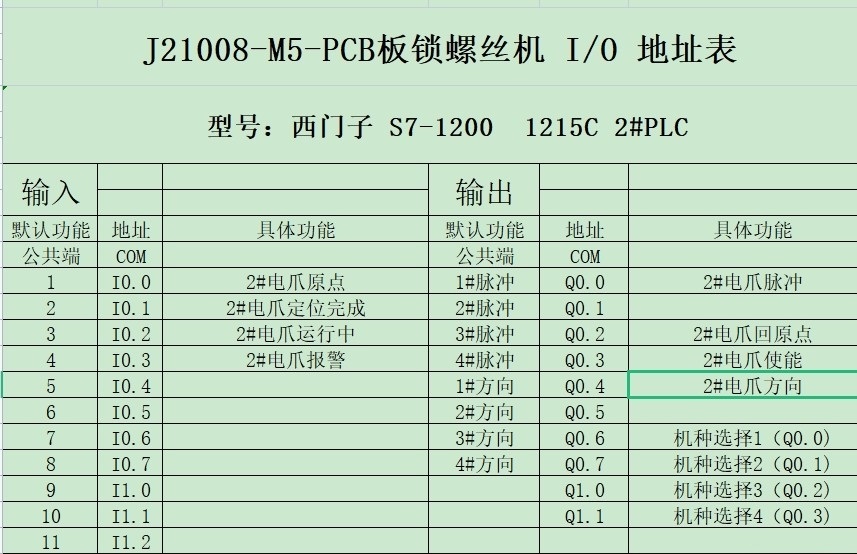
8):IO表
程序块已经在很多个项目上成熟应用,可以直接调用,对于做西门子1200轴控制等有很好的学习借鉴意义。
好好看一遍,有很大的提高作用。
ID:8735671448420376
Futureyx



西门子1200PLC轴运动控制程序模板
介绍:本文将介绍一个基于西门子1200PLC的轴运动控制程序模板。该程序模板是基于之前为海康威视开发的一台装路由器壳子的机器所设计。
该程序模板包含以下内容:
1)轴控制块:使用轴控制块来控制3个伺服电机。通过对轴控制块的调用,实现对伺服电机的精确控制,提高机器的运动精度和稳定性。
2)电缸控制:添加一个电缸,用于机器的特定操作。通过对电缸的控制,实现对机器运动过程中的某些操作的自动化。
3)PLC通讯:使用PUT GET块与上下游PLC进行通讯。通过与其他PLC进行数据交换,实现不同设备之间的协同工作,提高生产效率和自动化水平。
4)轴控制块:通过轴控制块实现对伺服电机的控制,使其可以根据预先设定的运动轨迹进行精确运动控制。轴控制块提供了丰富的功能和参数设置,可根据实际需求进行灵活调整。
5)气缸报警块:添加气缸报警块,用于检测气缸的工作状态和异常情况。当气缸发生故障或异常时,及时报警并采取相应的措施,确保机器的安全运行。
6)完整的电路图:提供机器的完整电路图,包括各个组件的连接和布局。通过电路图的参考,可以更好地理解和分析机器的工作原理和电气结构。
7)威纶通触摸屏程序:为机器配备了威纶通触摸屏程序,实现对机器的直观操作和监控。通过触摸屏界面,用户可以方便地控制和监测机器的运行状态。
8)IO表:提供了机器的IO表,列出了各个IO口的功能和连接方式。通过IO表的参考,可以方便地进行IO口的配置和接线。
该程序模板已经在多个项目中成功应用,并可以直接调用。对于学习和应用西门子1200轴控制等相关技术有很好的借鉴意义。通过仔细阅读和研究该程序模板,可以不仅提高对西门子1200PLC的理解和应用能力,还可以学习到工业自动化领域的最佳实践。
总结:
通过介绍这个基于西门子1200PLC的轴运动控制程序模板,我们了解了其主要功能和应用场景,并对其各个组成部分进行了详细的介绍。该程序模板具有较高的可复用性和稳定性,在多个项目中得到了验证和应用。通过学习和借鉴该程序模板,我们可以更好地理解和应用西门子1200轴控制等相关技术,提高工业自动化领域的应用能力。希望通过仔细阅读和研究该程序模板,能够对读者在实际应用中有所启发,进一步推动工业自动化技术的发展进步。
相关的代码,程序地址如下:http://wekup.cn/671448420376.html
















 2478
2478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









