









C语言内求平方根属于常规操作,因为<math.h>中已经提供了double sqrt(double)函数给大家调用,该函数接收一个double型变量,并返回其平方根。部分场合使用float类型,如果是我,我会这么写:
#include <math.h>
float x =0;
float inverse_square_root =0;
inverse_square_root =1/sqrt(x);事实上,大多数计算机处理加法和乘法时更快,对于除法和开方运算,速度相对较慢。定义在<math.h>中的sqrt()方法其系统开销是比较大的,尤其在部分MCU上,有时不能很好地满足系统实时性要求。
float FInvSqrtRoot(float x)
{
long i = 0;
float y, halfx;
halfx = 0.5 * x;
i = *(long*) &x; // 按照整型方法操作浮点数
i = 0x5f3759df - (i >> 1); // 魔法?
y = *(float*) &i; // 获得平方根倒数近似值
y = y * (1.5 - halfx * y * y); // 一次牛顿迭代
return y;
}该函数接收一个float型变量,并返回其平方根倒数。
Step1.奇怪的地址类型转换
i = *(long *) &x; // 按照整型方法操作浮点数代码第四行将浮点数x按照整型数据操作,这里的操作方法与类型转换有很大不同;类型转换将内存中按照浮点数标准表示的值近似为最接近的整数,并按照整数标准储存在内存中,像这样:i=(long)x;要理解*(long *) &x与(long)x的不同,需要了解浮点数在计算机中的表示方法。
浮点数在计算机中使用类似科学计数法的形式储存,float类型的浮点数使用32bit表示,结构如下:

最高位,第31位,为符号位,若S=0,该浮点数为正数;若S=1,该浮点数为负数。
接下来的8位数字,为指数部分,指数E范围为[0,255],为可以表示负指数,规定在E的范围基础上-127,即[-127,128];例如E=3表示2^(3-127)=2^(-124)。
接下来的23位数字,为尾数部分,即有效数字部分。由于二进制下有效数字必为1.xxx的形式,整数部分必为1,因此无需使用第22位表示整数1,而是直接表示小数点后一位,整数部分不在尾数M中体现,只在计算时加上;即M=0101…表示二进制的1.0101。以上,float型浮点数在内存中的存放形式已经明确。
现假设有一float型浮点正数x,其在内存中按照上述方式存放,即:
则x表示的浮点数值为:
注意平方根倒数速算法只接收正数,所以全文只讨论x为正浮点数的情况。
此时再回来看i=*(long *) &x这行代码;
第一步;取x的地址,注意此时x的地址指向一个浮点数,内存中对应的数据为:E*2^23+M
第二步;将该地址转换为指向long整型的地址,注意转换的是地址类型而不是数据,现在内存中的数据仍然是:E*2^23+M
第三步,取该地址指向的数据,赋给i;此时程序将按照整型标准去读取这个数据。因此,可以将i理解为x对应内存数据的整型解释。现在可以对i进行整型支持的操作,比如接下来要用到的位移操作。
准备工作已经完成,现在进入算法的核心,即施放魔法:
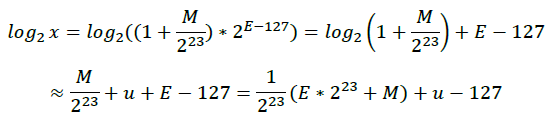
i = 0x5f3759df - (i >> 1); // 魔法?要理解这行代码,需要一点点数学铺垫;我们先给x表示的浮点数取个对数:

其中,M表示尾数,M/2^23范围在[0,1)之间;在极限理论中,若x属于[0,1],有以下关系:

即在x接近0或1的条件下,log2(1+x)接近x;很明显当x不靠近0或1时,误差会变大,如下图左侧所示:
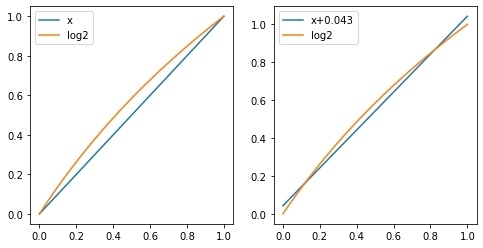
如果在等式右侧加入一个微小量u,可以使得x+u在[0,1]范围内近似log2(1+x),如上图右侧所示:

所以有:

因此,
此时再倒回去看浮点数x在内存中的存放形式,即:E*2^23+M;
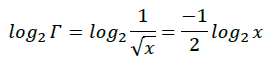
因此可以认为浮点数的对数形式与其内存存放形式相似,只是添加了缩放和平移。我们知道:

令:

所以有:
将上式展开:

稍作整理:

这太棒了,因为浮点数在内存中的存放形式,即:E*2^23+M
而上式中
则相当于对其内存形式右移1位,即
由此可知,魔法数字0x5f3759df就是包含u在内的修正项:
至此我们已经完成了魔法代码的解析:
这太棒了,因为浮点数在内存中的存放形式,即:E*2^23+M
而上式中
则相当于对其内存形式右移1位,即
由此可知,魔法数字0x5f3759df就是包含u在内的修正项:
至此我们已经完成了魔法代码的解析:
i = 0x5f3759df - (i >> 1); // 魔法i就是x对应内存数据的整型解释,将i右移1位相当于乘以二分之一,也就是1/2*(Ex*2^23+Mx);
等式右侧的运算结果,就是

,也就是
即

注意此时程序认为i是整型变量,所以需要下一行代码再将其转换为浮点型;
y = *(float *) &i; // 获得平方根倒数估计值此时y即是x的平方根倒数。


y = y * (1.5 - halfx * y * y); // 一次牛顿迭代接下来我会在STM32G071上测试Fast Inverse Square Root算法与<math.h>中提供的double sqrt(double)算法的性能,并尝试以此证明它为何被尊为经典。STM32G071运行在64MHz下,编译器和调试器优化分别为-O0和-g3。
使用uint32_t替代long型:
float FInvSqrtRoot(float x)
{
uint32_t i = 0;
float y, halfx;
halfx = 0.5 * x;
i = *(uint32_t*) &x; // 按照整型方法操作浮点数
i = 0x5f3759df - (i >> 1); // 施放魔法
y = *(float*) &i; // 获得平方根倒数近似值
y = y * (1.5 - halfx * y * y); // 一次牛顿迭代
return y;
}float test_data[8000] ={ 0 };
for (uint16_t i = 0; i < 8000; i++)
test_data[i] = i * 1000 + (float)i / 1000;//平方根倒数速算法
printf("FISR Test Start!\r\n");
ticks = 0;//定时器计数,1ms/tick
HAL_TIM_Base_Start_IT(&htim1);
for (uint16_t i = 0; i < 8000; i++)
sroot=FInvSqrtRoot(test_data[i]);
HAL_TIM_Base_Stop_IT(&htim1);
printf("FISR Test Stop!\r\n");
printf("FISR Time Elapsed:%f\r\n", ((float) ticks) / 1000);
//传统1/sqrt()
printf("SQRT Test Start!\r\n");
ticks = 0;
HAL_TIM_Base_Start_IT(&htim1);
for (uint16_t i = 0; i < 8000; i++)
sroot=1 / sqrt(test_data[i]);
HAL_TIM_Base_Stop_IT(&htim1);
printf("SQRT Test Stop!\r\n");
printf("SQRT Time Elapsed:%f\r\n", ((float) ticks) / 1000);float FSqrtRoot(float x) {
uint32_t i = 0;
float y;
i = *(uint32_t *) &x; // 按照整型方法操作浮点数
i = 0x1fbd1df5 + (i >> 1); // 施放魔法
y = *(float *) &i; // 获得平方根近似值
y = 0.5 * (y + x / y); // 一次牛顿迭代
return y;
}以上代码仅作原理演示用,已通过附件分享

感兴趣的朋友可自行推导实验,算法性能也请根据实际需求比对。
---------------------
作者:Litthins
链接:https://bbs.21ic.com/icview-3160046-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。














 1747
1747











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









