



本文基于触觉智能RK3506开发板,从性能、功耗、启动速度、实时性等一系列维度进行测评。
基础评测
测试环境:触觉智能RK3506开发板EVB3506,Linux内核为Kernel 6.1.84。
-
CPU性能
用sysbench工具测试,<geebench6工具>命令如下:
sudo apt-get update
sudo apt-get install sysbench
sysbench --test=cpu --cpu-max-prime=5000 run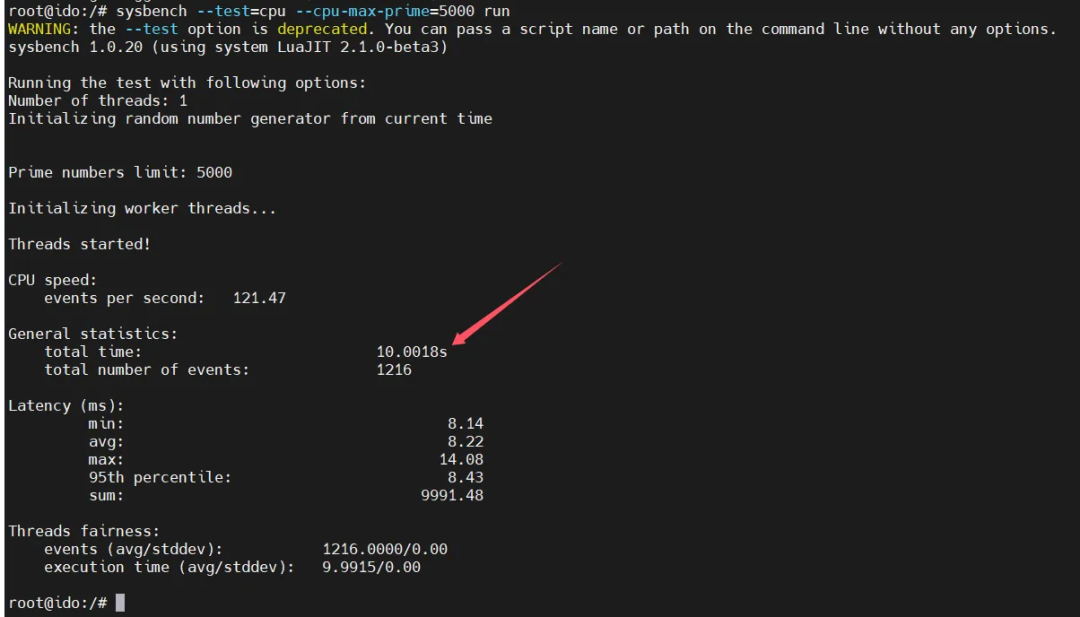
total time时间越短,性能越强。
测试结论:
● 工具:sysbench(质数计算上限5000)
● 结果:121.47事件/秒,总耗时10.0018秒,平均延迟8.22ms
● 结论:满足实时控制场景算力需求,适用于PLC、运动控制等应用。
-
显示性能
本项使用lvgl的demo程序进行测试,执行以下命令关闭默认的lvgl程序。
killall rk_demo拷贝网盘的demo测试程序和test.sh脚本到开发板系统
链接: https://pan.baidu.com/s/1NcWaIPjC0CE3AEGaQvWyGg?pwd=4dij
提取码: 4dij

执行以下命令进行测试
./test.sh&
#输入top命令按1键查看CPU使用率
top
1
测试结论:
● 测试场景:LVGL图形渲染
● 负载表现:CPU占用率≤30%
● 适用性:通用HMI界面流畅运行,能够满足通用1280×1280@60fps MIPI/RGB输出显示场景需求。
-
内存与存储
(1)DDR3内存,测试命令如下:
root@ido:/# sudo apt-get update
root@ido:/# sudo apt-get install sysbench
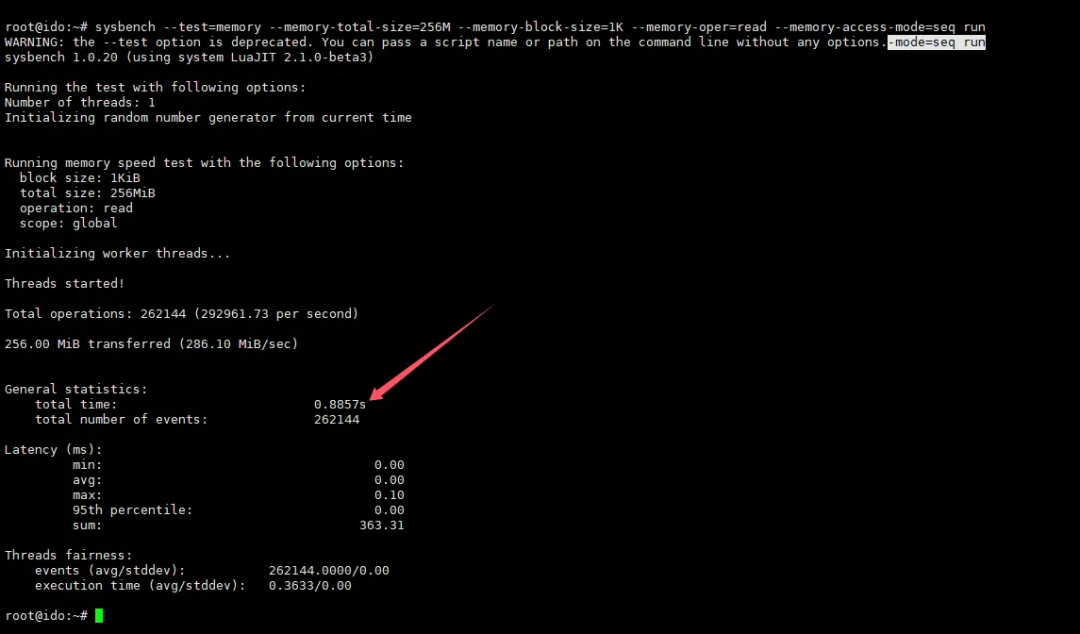
root@ido:/# sysbench --test=memory --memory-total-size=256M --memory-block-size=1K --memory-oper=read --memory-access-mode=seq runmemory-total-size=256M,表示指定测试数据的总大小;
memory-block-size=1K,表示指定内存块的大小;
memory-oper=read,表示设置内存操作类型;
memory-access-mode=seq run,表示设置存储器访问方式,顺序或随机。
测试结论:
● 256MB顺序读取速度:286.10 MB/s(SysBench)
● 评价:低延迟(平均0.00ms)与高带宽设计,支撑多任务实时处理。
(2)eMMC测试,测试命令如下:
root@ido:/# sudo apt-get update
root@ido:/# sudo apt-get install -y stress-ng
root@ido:/# sysbench --test=fileio --file-total-size=1G --file-test-mode=rndrw --file-block-size=4K --file-io-mode=async prepare
root@ido:/# sysbench --test=fileio --file-total-size=1G --file-test-mode=rndrw --file-block-size=4K --file-io-mode=async run 代码说明:
test=fileio,表示指定测试类型为文件 I/O 测试;
file-total-size=1G,表示设置测试文件的总大小为 1GB;
file-test-mode=rndrw,表示指定文件测试模式为随机读写;
file-block-size=4K,表示设置文件操作的块大小为4KB
file-io-mode=async prepare,表示指定文件 I/O 操作的模式为异步;
file-io-mode=async,表示设置文件操作的模式;
prepare/run,表示执行测试的准备步骤/执行文件I/O 性能测试;
prepare/run,先选择prepare创建文件后再执行run操作步骤;
测试结论:
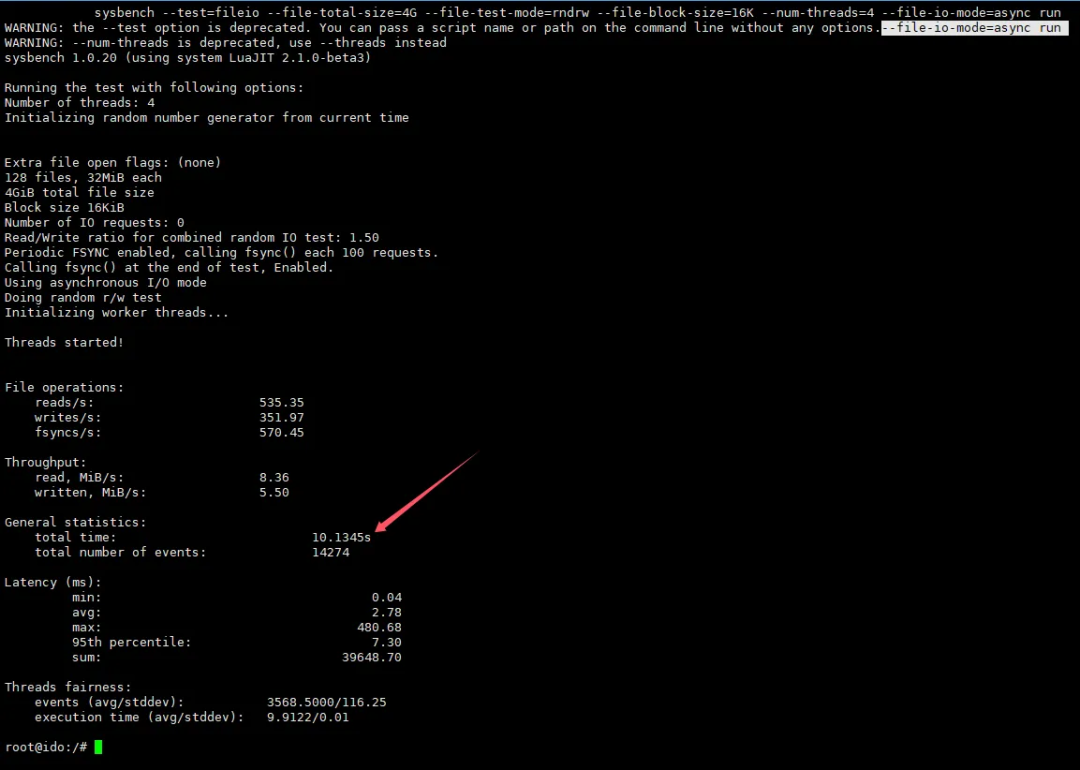
● 测试项目:eMMC随机读写(4K块):
● 读吞吐:8.36 MiB/s
● 写吞吐:5.50 MiB/s
● 读平均延迟:2.78ms(95%操作<7.3ms)
数据表示,可稳定应对工业小文件频繁读写场景。
(3)NAND Flash 测试,使用sysbench工具,测试命令如下:
./sysbench --test=fileio --file-total-size=512M --file-num=1 --file-test-mode=rndrw --file-block-size=4K --file-io-mode=sync prepare
./sysbench --test=fileio --file-total-size=512M --file-num=1 --file-test-mode=rndrw --file-block-size=4K --file-io-mode=sync --num-threads=4 run
# 测试完后清理测试文件
./sysbench --test=fileio cleanup代码说明:
test=fileio,表示指定测试类型为文件 I/O 测试;
file-total-size=512M,表示设置测试文件的总大小为512M;
file-num=1,表示创建一个测试文件;
file-test-mode=rndrw,表示指定文件测试模式为随机读写;
file-block-size=4K,表示设置文件操作的块大小为4KB;
file-io-mode=sync,表示设置文件操作的模式;
num-threads,表示测试使用线程数数量;
prepare/run,表示执行测试的准备步骤/执行文件I/O 性能测试;

测试结论:
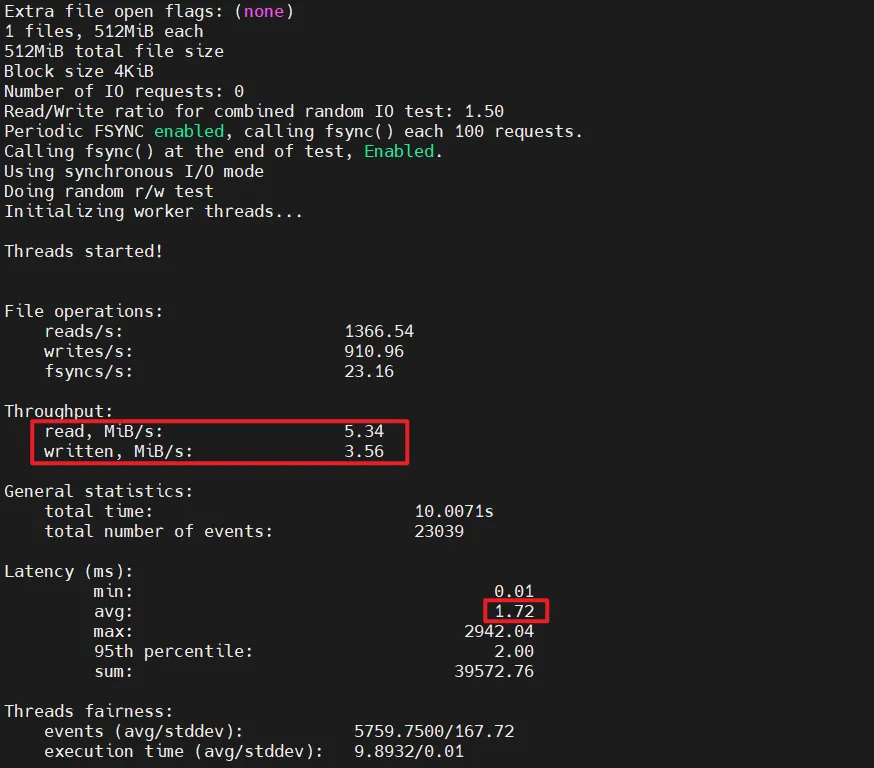
● 测试项目:NAND Flash随机读写(4K块):
● 读吞吐:5.34 MiB/s
● 写吞吐:3.56 MiB/s
● 读平均延迟:1.72ms
数据表示,可稳定应对工业小文件频繁读写场景。
-
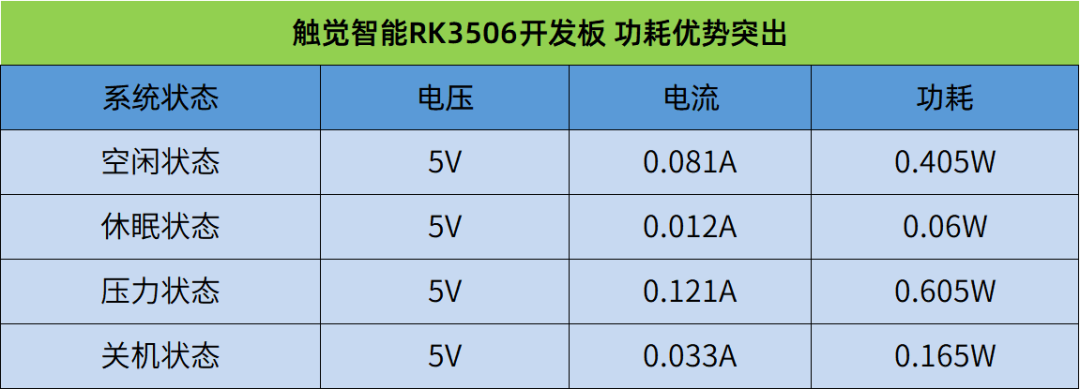
功耗与散热
具体测试方法较长,可观看以下视频:
https://www.bilibili.com/video/BV1FLJqzqEWW?t=45.2
功耗测试结论:
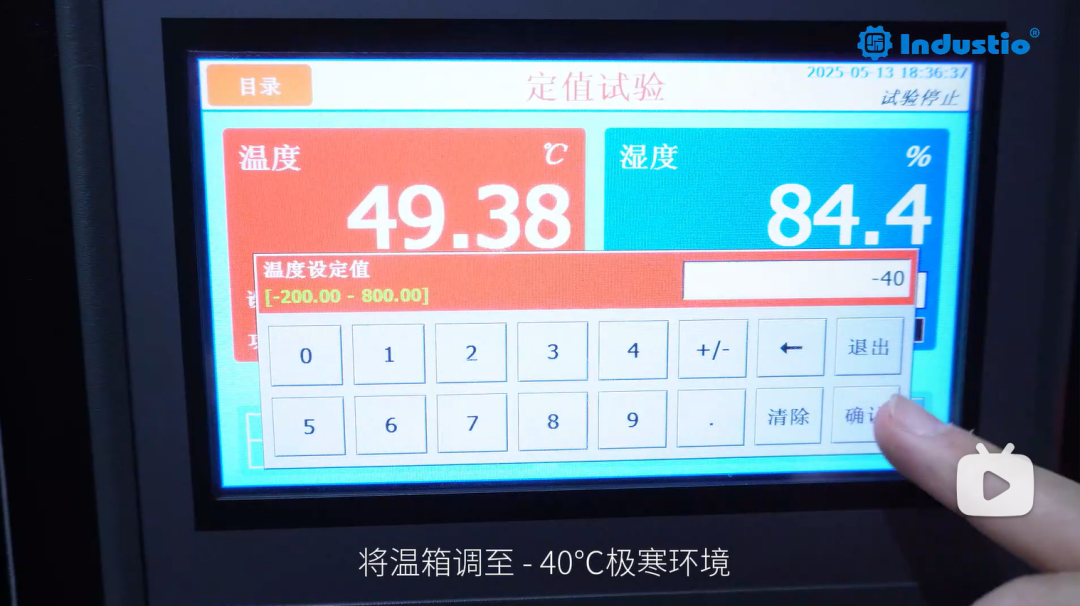
高低温测试结论:
极端温升:93.3℃高温压力测试30分钟,功能正常测试通过。

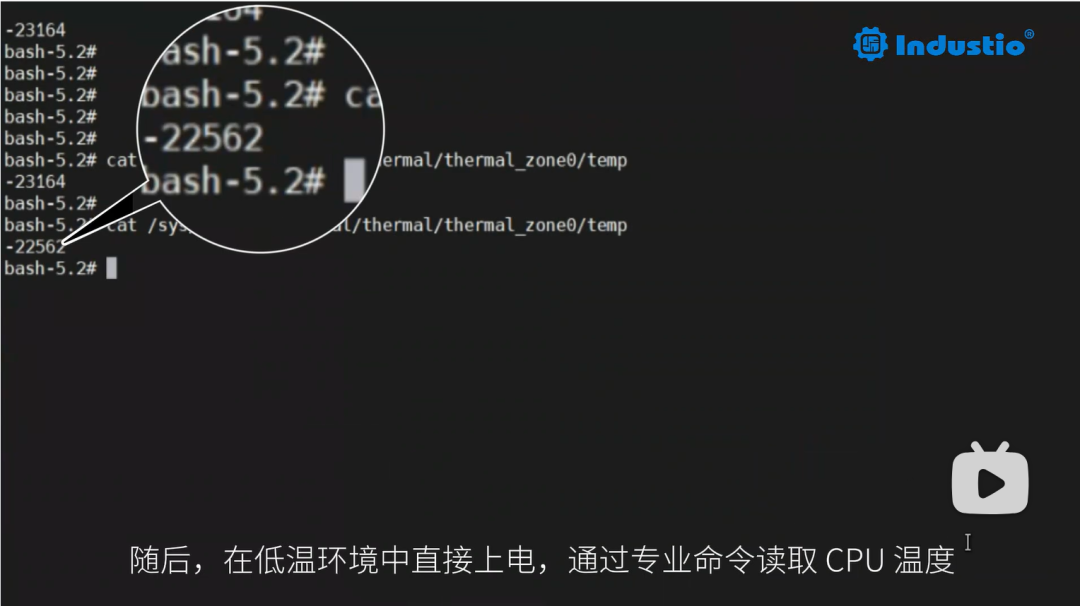
极寒环境:-40℃高温压力测试30分钟,

实时性测试
-
RT-Linux
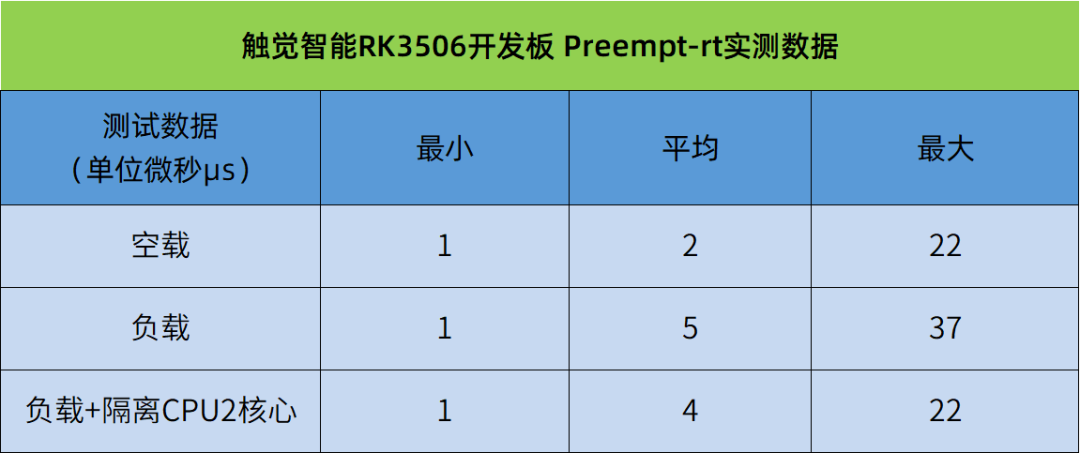
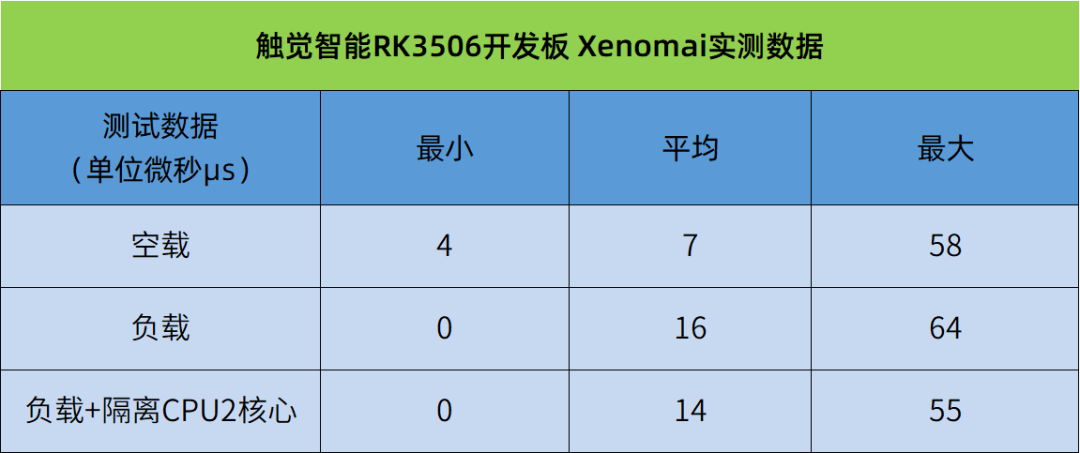
触觉智能RK3506开发板RT Linux测试详细方法,可浏览往期文章。我们针对PREEMPT_RT与Xenomai两大内核,使用Cyclictest工具做了长达72小时的测试!在满负载测试条件下取得最大37微秒的优秀成绩,结论如下:
-
Ethercat测评
伺服驱动器和主板接上网线并上电,如下图所示:
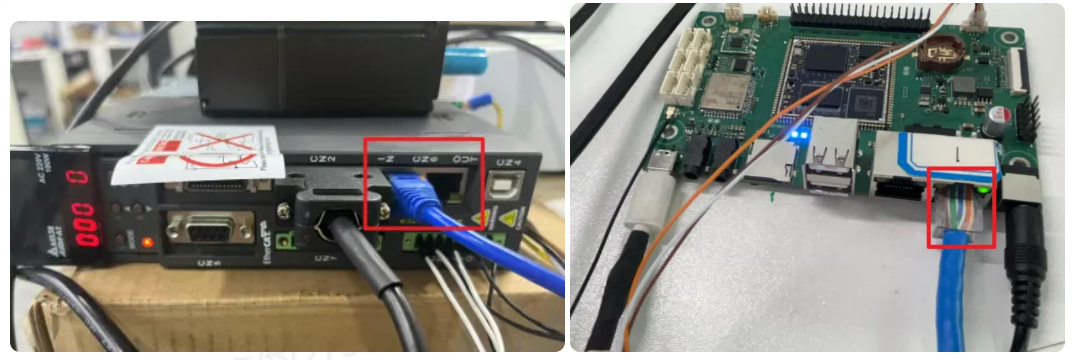
触觉智能RK3506开发板上电后,通过调试串口进入调试终端,执行以下命令控制电机转动,命令如下:
# 关闭内核打印
echo 0 > /proc/sys/kernel/printk
# 开启ethercat服务
/etc/init.d/ethercat start
# 电机逆时针转动
taskset -c 2 /usr/bin/igh_ethercat_dc_motor -d 0
# 电机顺时针转动
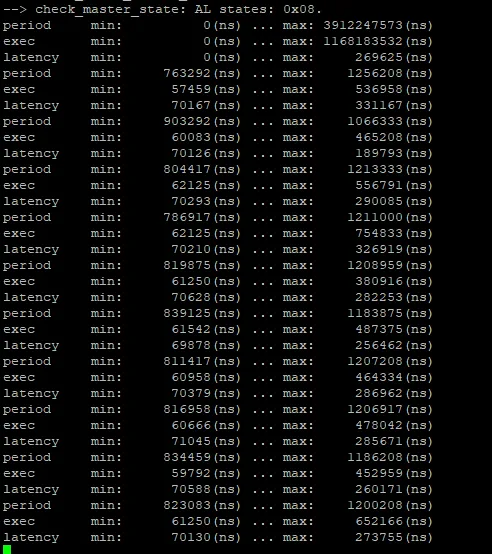
taskset -c 2 /usr/bin/igh_ethercat_dc_motor -d 1结果说明:
period(Ethercat通讯周期):最大900000NS(纳秒),仅为900μs微秒;
exec(接收和发送Ethercat数据的时间):最大62000NS(纳秒),仅为62μs微秒;
latency(等待唤醒时间):最大71000NS(纳秒),仅为71μs微秒。可达到微秒µs级延迟,满足EtherCAT等工业协议实时控制
触觉智能RK3506开发板/核心板, 瑞芯微RK3506B/RK3506J 多核异构处理器(3核A7@1.5Ghz+M0,满载0.65W),双CAN FD、双网口、6路串口, -40℃~85℃


















 851
851

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











