







 本文介绍了在移动障碍场景中使用A*算法进行路径搜索的方法,针对天池大数据比赛中的一项任务。给定风速数据和城市坐标,需要规划无人机在风速超过15时不会坠毁的最优飞行路径。通过调整A*算法的代价函数,增加障碍物距离的权重,确保路径远离障碍物。此外,通过存储路径节点信息,动态更新障碍物状态以提高效率。代码和可视化结果已开源在GitHub上。
本文介绍了在移动障碍场景中使用A*算法进行路径搜索的方法,针对天池大数据比赛中的一项任务。给定风速数据和城市坐标,需要规划无人机在风速超过15时不会坠毁的最优飞行路径。通过调整A*算法的代价函数,增加障碍物距离的权重,确保路径远离障碍物。此外,通过存储路径节点信息,动态更新障碍物状态以提高效率。代码和可视化结果已开源在GitHub上。
之前报名了天池大数据的比赛:
https://tianchi.aliyun.com/competition/information.htm?spm=5176.100067.5678.2.3d246108F4wkZF&raceId=231622
我的网盘中数据下载链接:链接:https://pan.baidu.com/s/1Wdbzktr8la5XMRpjrTotTQ 密码:sd42
可是只是做了最开始一部分。就被其他的事情耽搁了。
不过已经做的东西还是想记录一下,或许有人遇到类似的问题,可以帮助到他。
那么现在我们的问题是:在指定时间内完成货运任务。
给定出发城市和十个目的城市坐标,如图:

给定当天03:00-21:00内每小时的天气变化数据(当前区域内每一像素坐标风速),给的是一个csv文件,我把数据画出来方便分析:
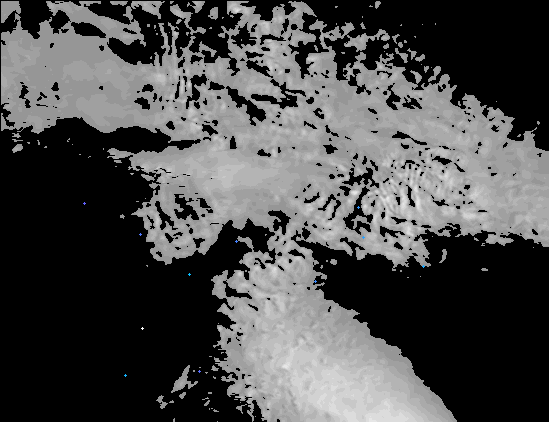
上图是某一时刻的天气,黑色的部分表示风速<15,而白色的部分表示无人机无法通过。
要求规划出最优飞行路径。若无人机所在区域风速>15,则无人机坠毁。
那就是一个路径搜索算法,而且场景中的障碍物位置是变化。不过障碍区域是可以预知的。在一个二维的地图中,拥有变化的障碍物,实际上我们可以把时间看做第三维。那么问题就明朗了起来,实际上就是一个三维空间中的路径搜索,因为障碍物是可以预知的了
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 530
530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









