





最近负责 Android 驱动的GPS部分,所谓Android驱动 我觉得可以说成是linux应用
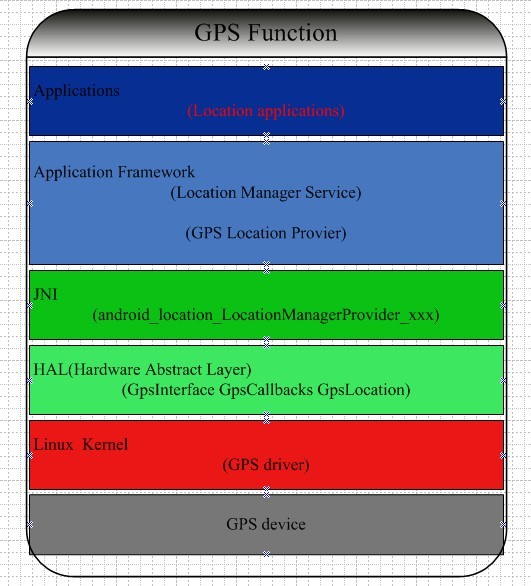
之前发了一个图描述了 Android GPS 架构
GPS芯片大多采用串口通信,所以只要CPU能够提供一个UART 驱动, 那么跟GPS芯片通信是没有问题的,
但是现在很多GPS功能不是一个单独的芯片,大部分都是一个芯片上有好几种无线模块 比如 Blletooth WiFi FM等
有时候 有些功能就会去复用一个UART,这样在管理上就相对麻烦, 要将一个UART驱动, 模拟成一个HCI的接口而后才能使GPS功能(TI1281)
比较好的是我们的项目是单一的GPS chip 听说apple也是用的这一款,不过人家拿的是全部的source code,而我们只有部分的code而没有核心算法的code 很郁闷, 但是即便是只有部分code从里边还是可以学到很多的机制
对于android GPS驱动来说主要的工作是实现HAL层 计编译生成一个叫做gps.***.so的动态库的 代码.
由app发出定位申请,此时会去启动一个定位服务线程,此线程会调用到Location provider 服务在App Framwork中,在次会通过被native方法调用到JNI中,JNI获得GpsInterface并传给接口一个回调函数的实现。
GpsInterface就是由HAL层最主要实现
介绍下gps.h下得重要相关结构题定义
在android2.3中gps.h定义在/hardware/inclue/hardware下
主要的结构
1、相关宏定义:
- 定位模式定义
/**RequestedoperationalmodeforGPSoperation.*/
typedefuint32_tGpsPositionMode;
//IMPORTANT:Notethatthefollowingvaluesmustmatch
//constantsinGpsLocationProvider.java.
/**ModeforrunningGPSstandalone(noassistance).*/
#defineGPS_POSITION_MODE_STANDALONE0 //纯GPS使用卫星定位
/**AGPSMS-Basedmode.*/
#defineGPS_POSITION_MODE_MS_BASED1 //基于用户终端的A-GPS
/**AGPSMS-Assistedmode.*/
#defineGPS_POSITION_MODE_MS_ASSISTED2 //基于用户终端辅助A-GPS
- 工作模式
/**RequestedrecurrencemodeforGPSoperation.*/
typedefuint32_tGpsPositionRecurrence;
//IMPORTANT:Notethatthefollowingvaluesmustmatch
//constantsinGpsLocationProvider.java.
/**ReceiveGPSfixesonarecurringbasisataspecifiedperiod.*/
#defineGPS_POSITION_RECURRENCE_PERIODIC0//周期性的
/**RequestasingleshotGPSfix.*/
#defineGPS_POSITION_RECURRENCE_SINGLE1//单次工作 - 辅助数据(在测试GPS性能时候又是需要删除全部或部分的辅助数据)
/**Flagsusedtospecifywhichaidingdatatodelete
whencallingdelete_aiding_data().*/
typedefuint16_tGpsAidingData;
//IMPORTANT:Notethatthefollowingvaluesmustmatch
//constantsinGpsLocationProvider.java.
#defineGPS_DELETE_EPHEMERIS0x0001
#defineGPS_DELETE_ALMANAC0x0002
#defineGPS_DELETE_POSITION0x0004
#defineGPS_DELETE_TIME0x0008
#defineGPS_DELETE_IONO0x0010
#defineGPS_DELETE_UTC0x0020
#defineGPS_DELETE_HEALTH0x0040
#defineGPS_DELETE_SVDIR0x0080
#defineGPS_DELETE_SVSTEER0x0100
#defineGPS_DELETE_SADATA0x0200
#defineGPS_DELETE_RTI0x0400
#defineGPS_DELETE_CELLDB_INFO0x8000
#defineGPS_DELETE_ALL0xFFFF - gps芯片可以处理的“能力”
/**Flagsforthegps_set_capabilitiescallback.*/
/**GPSHALschedulesfixesforGPS_POSITION_RECURRENCE_PERIODICmode.
Ifthisisnotset,thentheframeworkwilluse1000msformin_interval
andwillstartandcallstart()andstop()toscheduletheGPS.
*/
#defineGPS_CAPABILITY_SCHEDULING0x0000001/**GPSsupportsMS-BasedAGPSmode*/
#defineGPS_CAPABILITY_MSB0x0000002/**GPSsupportsMS-AssistedAGPSmode*/
#defineGPS_CAPABILITY_MSA0x0000004/**GPSsupportssingle-shotfixes*/
#defineGPS_CAPABILITY_SINGLE_SHOT0x0000008 - 还有很多的定义此处不一一列举 在gps.h中都有很好的解释。
2、数据结构体
- GpsLocation
定义了一个表示方位的结构体,成员有经纬度,高度,速度,方位角等。 - GpsStatus
表示GPS的当前状态,只有两个成员一个是表示结构大小的成员,与一个表示Gps状态的类型GpsStatusValue
/**GPSstatuseventvalues.*/
typedefuint16_tGpsStatusValue;
//IMPORTANT:Notethatthefollowingvaluesmustmatch
//constantsinGpsLocationProvider.java.
/**GPSstatusunknown.*/
#defineGPS_STATUS_NONE0/**GPShasbegunnavigating.*/
#defineGPS_STATUS_SESSION_BEGIN1/**GPShasstoppednavigating.*/
#defineGPS_STATUS_SESSION_END2/**GPShaspoweredonbutisnotnavigating.*/
#defineGPS_STATUS_ENGINE_ON3/**GPSispoweredoff.*/
#defineGPS_STATUS_ENGINE_OFF4 - GpsSvInfo
表示当前的卫星信息,有卫星编号,信号强度,卫星仰望角方位角等 - GpsSvStatus
表示卫星状态,包含了GpsSvInfo结构,可见卫星数,星历时间,年历时间,与用来定位的卫星的卫星构成的一个掩码 - AGpsRefLocation
/*2Gand3G*/
/*In3Glacisdiscarded*/
typedefstruct{
uint16_ttype;
uint16_tmcc;
uint16_tmnc;
uint16_tlac;
uint32_tcid;
}AGpsRefLocationCellID;
typedefstruct{
uint8_tmac[6];
}AGpsRefLocationMac;
/**Representsreflocations*/
typedefstruct{
uint16_ttype;
union{
AGpsRefLocationCellIDcellID;
AGpsRefLocationMacmac;
}u;
}AGpsRefLocation;
/**RepresentsthestatusofAGPS.*/
typedefstruct{
/**settosizeof(AGpsStatus)*/
size_tsize;
AGpsTypetype;
AGpsStatusValuestatus;
}AGpsStatus
3、回调函数指针定义
/*Callbackwithlocationinformation.告知上层位置信息*/
typedefvoid(*gps_location_callback)(GpsLocation*location);
/**Callbackwithstatusinformation.GPS状态信息回调*/
typedefvoid(*gps_status_callback)(GpsStatus*status);
/**CallbackwithSVstatusinformation.卫星状态信息回调*/
typedefvoid(*gps_sv_status_callback)(GpsSvStatus*sv_info);
/**CallbackforreportingNMEAsentences.向上层传递NEMA数据*/
typedefvoid(*gps_nmea_callback)(GpsUtcTimetimestamp,constchar*nmea,intlength);
/**CallbacktoinformframeworkoftheGPSengine'scapabilities.告知上层次GPS能实现那些功能*/
typedefvoid(*gps_set_capabilities)(uint32_tcapabilities);
/**CallbackutilityforacquiringtheGPSwakelock.gps上锁让gps功能不会被suspend*/
typedefvoid(*gps_acquire_wakelock)();
/**CallbackutilityforreleasingtheGPSwakelock.释放锁*/
typedefvoid(*gps_release_wakelock)();
/**CallbackforcreatingathreadthatcancallintotheJavaframeworkcode.threadcreate
在次线程处理函数中通常会由一个无限的循环,去等待上层的请求,并应答*/
typedefpthread_t(*gps_create_thread)(constchar*name,void(*start)(void*),void*arg);
4、接口结构体
- GpsCallbacks
typedefstruct{
/**settosizeof(GpsCallbacks)*/
size_tsize;
gps_location_callbacklocation_cb;
gps_status_callbackstatus_cb;
gps_sv_status_callbacksv_status_cb;
gps_nmea_callbacknmea_cb;
gps_set_capabilitiesset_capabilities_cb;
gps_acquire_wakelockacquire_wakelock_cb;
gps_release_wakelockrelease_wakelock_cb;
gps_create_threadcreate_thread_cb;
}GpsCallbacks;
就是以上函数指针组成的结构体,是一组回调函数,函数的实现在JNI层是Android实现好了得,无需做(太大的)修改 - GpsInterface
Android GPS 最主要的数据结构,我们最主要的移植工作就是实现其中的函数
/**RepresentsthestandardGPSinterface.*/
typedefstruct{
/**settosizeof(GpsInterface)*/
size_tsize;
/*Openstheinterfaceandprovidesthecallbackroutines初始化callbacks为JNI传下来的
在此会使用callbacks中的create_thread_cb来创建一个线程处理函数一直循环,等待任务处理*/
int(*init)(GpsCallbacks*callbacks);
/**Startsnavigating.*/
int(*start)(void);
/**Stopsnavigating.*/
int(*stop)(void);
/**Closestheinterface.*/
void(*cleanup)(void);
/**Injectsthecurrenttime.填入时间*/
int(*inject_time)(GpsUtcTimetime,int64_ttimeReference,
intuncertainty);
/**Injectscurrentlocationfromanotherlocationprovider填入位置*/
int(*inject_location)(doublelatitude,doublelongitude,floataccuracy);
/*删除全部or部分辅助数据在性能测试时候使用*/
void(*delete_aiding_data)(GpsAidingDataflags);
/*设置定位模式与GPS工作模式等等*/
int(*set_position_mode)(GpsPositionModemode,GpsPositionRecurrencerecurrence,
uint32_tmin_interval,uint32_tpreferred_accuracy,uint32_tpreferred_time);
/*自行添加的接口AGpsInterface接口通过次函数获得*/
constvoid*(*get_extension)(constchar*name);
}GpsInterface; - AGpsCallbacks
/**CallbackwithAGPSstatusinformation.
*Canonlybecalledfromathreadcreatedbycreate_thread_cb.
*/
typedefvoid(*agps_status_callback)(AGpsStatus*status);
/**CallbackstructurefortheAGPSinterface.*/
typedefstruct{
agps_status_callbackstatus_cb;
gps_create_threadcreate_thread_cb;
}AGpsCallbacks; - AGpsInterface
/**ExtendedinterfaceforAGPSsupport.*/
typedefstruct{
/**settosizeof(AGpsInterface)*/
size_tsize;
/**
*OpenstheAGPSinterfaceandprovidesthecallbackroutines
*totheimplemenationofthisinterface.
*/
void(*init)(AGpsCallbacks*callbacks);
/**
*Notifiesthatadataconnectionisavailableandsets
*thenameoftheAPNtobeusedforSUPL.
*/
int(*data_conn_open)(constchar*apn);
/**
*NotifiesthattheAGPSdataconnectionhasbeenclosed.
*/
int(*data_conn_closed)();
/**
*NotifiesthatadataconnectionisnotavailableforAGPS.
*/
int(*data_conn_failed)();
/**
*SetsthehostnameandportfortheAGPSserver.
*/
int(*set_server)(AGpsTypetype,constchar*hostname,intport);
}AGpsInterface - struct gps_device_t
定义描述gps设备类型
structgps_device_t{上层会通过动态库,获得此结构,等到GpsInterface从而打通APP到GPS device的全部通信。
structhw_device_tcommon;
/**
*Settheprovidedlightstotheprovidedvalues.
*
*Returns:0onsucces,errorcodeonfailure.
*/
constGpsInterface*(*get_gps_interface)(structgps_device_t*dev);
}; - 还有 GpsNiInterfaceAGpsRilInterface等接口 在此不赘述















 4497
4497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









