







 本文介绍了在TQ2440开发板上,基于Ubuntu 13.04进行Linux I2C驱动的开发,特别是针对AT24C02 EEPROM的驱动实现。内容涵盖I2C架构概述、驱动代码解析,包括i2c-dev.c文件的使用以及legacy和new style式I2C设备驱动的区别。通过实例展示了如何利用ioctl()进行读写操作。
本文介绍了在TQ2440开发板上,基于Ubuntu 13.04进行Linux I2C驱动的开发,特别是针对AT24C02 EEPROM的驱动实现。内容涵盖I2C架构概述、驱动代码解析,包括i2c-dev.c文件的使用以及legacy和new style式I2C设备驱动的区别。通过实例展示了如何利用ioctl()进行读写操作。
TQ2440 linux i2c驱动——at24c02(eeprom)
最近因为实习的原因要搞一个摄像头的驱动,多数cmos摄像头是用SCCB协议来配置寄存器,类似于i2c,于是从零o开始。因为TQ2440板上有at24c02 eeprom,正好拿他来开刀。下面把这几天的心得写下来与大家分享。一.开发环境:
(1)开发板:TQ2440开发板
(2)pc系统:ubuntu 13.04-amd64
(4)linux kernel:linux 2.6.30。4
二.i2c系统简介
(这里稍微罗嗦几句结构上的东西,摘抄自网络)I2c是philips提出的外设总线.I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL.正因为这样,它方便了工程人员的布线.另外,I2C是一种多主机控制总线.它和USB总线不同,USB是基于master-slave机制,任何设备的通信必须由主机发起才可以.而I2C是基于multi master机制.一同总线上可允许多个master.关于I2C协议的知识,这里不再赘述.可自行下载spec阅读即可.
1.I2C架构概述
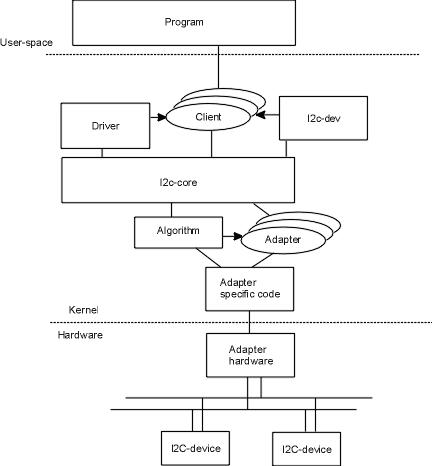
如上图所示,每一条I2C对应一个adapter.在kernel中,每一个adapter提供了一个描述的结构(struct i2c_adapter),也定义了adapter支持的操作(struct i2c_adapter).再通过i2c core层将i2c设备与i2c adapter关联起来。
2.我们需要动手的部分
(1).平台总线驱动。这个一般内核都有,s3c2440的在/drivers/i2c/busses/i2c-s3c2410.c这里不会分析这个,我也没弄懂.(2).编写挂在总线上的设备驱动。本文重点讲这个怎么写。这个驱动一般分为二类:
a.i2c-dev.c
这个是linux 内核自带的一个通用驱动(/drivers/i2c/i2c-dev.c).i2c-dev.c 并没有针对特定的设备而设计,只是提供了通用的 read()、write()和 ioctl()等接口,应用层可以借用这些接口访问挂接在适配器上的 i2c 设备的存储空间或寄存器,并控制 I2C设备的工作方式。需要特别注意的是:i2c-dev.c 的 read()、write()方法都只适合于如下方式的数据格式(可查看内核相关源码)
图 1 单开始信号时序

所以不具有太强的通用性,如下面这种情况就不适用(通常出现在读目标时)

图 2 多开始信号时序
而且 read()、write()方法只适用用于适配器支持 i2c 算法的情况,如:
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
而不适合适配器只支持 smbus 算法的情况,如:
static const struct i2c_algorithm smbus_algorithm = {
.smbus_xfer = i801_access,
.functionality = i801_func,
};
基于上面几个原因,
所以一般都不会使用 i2c-dev.c 的 read()、write()方法。最常用的是 ioctl()
方法。ioctl()方法可以实现上面所有的情况(两种数据格式、以及 I2C 算法和 smbus 算法)
。
针对 i2c 的算法,需要熟悉 struct i2c_rdwr_ioctl_data 、struct i2c_msg。使用的命令是
I2C_RDWR。
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};
struct i2c_msg {
_ _u16 addr; /* slave address */
_ _u16 flags; /* 标志(读、写) */_ _u16 len; /* msg length */
_ _u8 *buf; /* pointer to msg data */
};
针对 smbus 算法,需要熟悉 struct i2c_smbus_ioctl_data。使用的命令是 I2C_S
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









