







P2020 ( e500核 ) 上电启动及uboot流程
系统上电到执行第一条指令前,需要经过配置PLL、Local Bus控制器、LAW、MMU等操作,这些配置完全是由Cpu根据芯片的默认值和芯片外部配置引脚的输入状态自动完成的。如:
1) Cpu根据cfg_sys_pll[0:2]的输入状态决定当前CPU的BBC对SYS_CLK的倍频参数;
2) Cpu根据cfg_ddr_pll[0:2] 的输入状态决定DDR的时钟频率(DDR2和DDR3不同);
3) Cpu根据cfg_core0_pll[0:2]/cfg_core1_pll[0:2]的输入状态决定当前CPU的cor0/cor1对CCB的倍频参数;
4) Cpu根据cfg_cpu0_boot和cfg_cpu1_boot的输入状态决定复位时执行boot代码的Core,如下图所示:
5) Cpu根据cfg_rom_loc[0:3]的输入状态决定Boot ROM的位置。
6) 其它根据外部输入状态决定的配置。
以上,对软件来说最重要的配置是Boot ROM位置的配置。Boot ROM位置与cfg_rom_loc[0:3]输入状态的关系如下图所示:

在硬件连接无误的情况下,P2020启动的配置为:
cfg_cpu0_boot=1,core0启动;
cfg_cpu1_boot=0,core1等待;
cfg_rom_loc[0:3] =1110,从Local bus GPCM—16-bit ROM启动;
根据P2020的硬件手册,Cpu复位后执行的第一条指令的地址是0xFFFF,FFFC。因此,Cpu要能正确执行U-boot代码,至少需要下面几个条件:
l Local Access Window能正确转换U-boot代码的物理地址空间
l Local Bus Control能正确转换U-boot代码的物理地址空间
l MMU能正确转换U-boot代码的有效地址空间(e500核的MMU无法关闭)
首先,根据P2020手册,Local Access Window对Boot ROM的地址转换,不通过LAW寄存器配置。在复位时,映射0x0_FF80_0000到启动地址(硬件配置为Local bus GPCM),共8M空间。这样解决了第一个问题。
接着,P2020复位时Local Bus Control寄存器BRn/ORn有默认值为全0,设定了第0个Local Bus Bank的地址空间是从0x0000_0000开始的4G空间,且MSEL=GPCM。这样,所有映射到Local Bus上的地址都会使CS0有效。
然后,MMU在复位时也有默认值。实际上,虽然P2020的MMU有16个TLB1和512个TLB0,复位时仅TLB1的Entry0有效。Entry0将0xFFFF,F000开始的4k有效地址空间映射到0xFFFF,F000开始的4k物理地址空间中,TLB1的Entry0配置如下表所示:
有了以上的配置,P2020 Cpu复位时就能够从连接在Local Bus的CS0上的Nor Flash执行第一条指令了。具体过程如下:
Cpu从0xFFFF,FFFC有效地址开始执行,先经过MMU转换得到物理地址0xFFFF,FFFC;然后,Local Access Window的特殊转换直接将0xFFFF,FFFC转换到Cpu的外围器件Local bus GPCM—16-bit ROM上;最后,由于Local Bus的CS0覆盖了4G空间,0xFFFF,FFFC直接被送到了Nor Flash(Boot Flash)的地址总线上。如果外接Boot Flash只有16M BYTE,则地址总线仅24位,0xFFFF,FFFC代表了Flash 0xFF,FFFC的地址。
/cpu/mpc85xx/u-boot.lds文件是连接器脚本文件,其中:
.bootpg RESET_VECTOR_ADDRESS - 0xffc:
{
cpu/mpc85xx/start.o (.bootpg)
} :text = 0xffff
规定了/cpu/mpc83xx/start.s的_start_e500代码段放在Flash倒数4K的位置。
.resetvec RESET_VECTOR_ADDRESS:
{
*(.resetvec)
} :text = 0xffff
规定了复位后从resetvec段开始取指令,这个resetvec段放在FFFFFFFC的位置,在/cpu/mpc85xx/resetvec.s中可以看到e500核从倒数第4个字节处取的是一条跳转指令为:
b _start_e500
跳转到位于倒数4K位置的_start_e500标号处。
_start_e500开始的代码会在空间1里建立一个4M的Entry映射,使用的是Entry15,这样就把所有的uboot代码都可以访问到了。然后再会跳到_start标号开始的地方,_start标号位于倒数512K的位置,在这之后的过程和e300核的start.s类似。
E500核的u-boot的启动是从/cpu/mpc85xx/start.s中的_start_e500标号开始的,经历了/cpu/mpc85xx/start.s,/cpu/mpc85xx/cpu_init_early.c,/cpu/mpc85xx/cpu_init.c,/lib_ppc/Board.c等几个文件中的多个汇编和C函数,最后会在/lib_ppc/Board.c中的board_init_r函数中进入命令死循环,等待执行键入的命令。其具体的流程如下图所示:
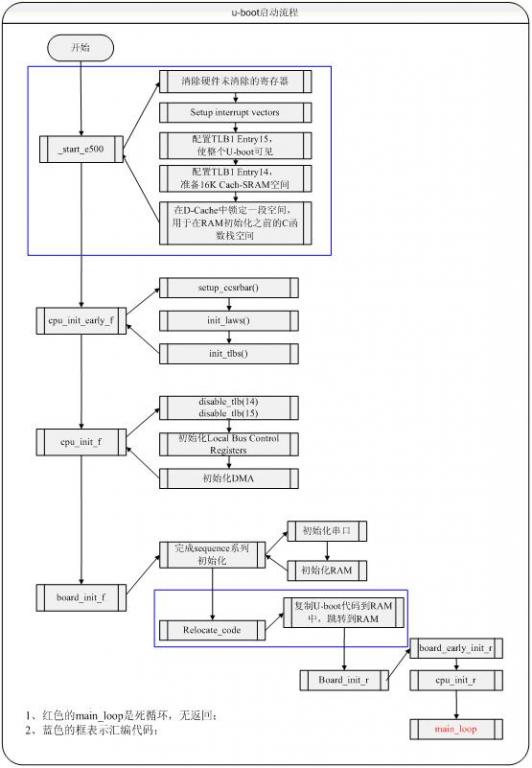
_start_e500函数
初始化e500核心,清除指令和数据cache,有效指令和数据cache,设置中断向量,禁止中断响应,禁止看门狗,只允许machine check中断,设置为supervisor级别,无效指令和数据cache,设置HID0寄存器等,为系统创建一个干净可靠的初始环境。
MMU初步配置
从前面P2020上电流程可以看出,上电之后,MMU只配置了4k空间,在这4k空间内必须初步配置MMU,使MMU能够映射u-boot真实的有效地址空间。下面这段代码将TLB1的Entry0配置为4M空间。
lis r6,FSL_BOOKE_MAS0(1, 15, 0)@h
ori r6,r6,FSL_BOOKE_MAS0(1, 15, 0)@l
/* create a temp mapping in AS=1 to the 4M boot window */
lis r7,FSL_BOOKE_MAS1(1, 1, 0, 1, BOOKE_PAGESZ_4M)@h
ori r7,r7,FSL_BOOKE_MAS1(1, 1, 0, 1, BOOKE_PAGESZ_4M)@l
lis r8,FSL_BOOKE_MAS2(TEXT_BASE & 0xffc00000, (MAS2_I|MAS2_G))@h
ori r8,r8,FSL_BOOKE_MAS2(TEXT_BASE & 0xffc00000, (MAS2_I|MAS2_G))@l
/* The 85xx has the default boot window 0xff800000 - 0xffffffff */
lis r9,FSL_BOOKE_MAS3(0xffc00000, 0, (MAS3_SX|MAS3_SW|MAS3_SR))@h
ori r9,r9,FSL_BOOKE_MAS3(0xffc00000, 0, (MAS3_SX|MAS3_SW|MAS3_SR))@l
mtspr MAS0,r6
mtspr MAS1,r7
mtspr MAS2,r8
mtspr MAS3,r9
isync
msync
tlbwe
经过以上配置,u-boot代码就可以使用TEXT_BASE定义的有效地址空间了。但是,这时的Local Bus Bank的配置还是默认值。后面的代码会重新修改MMU映射,将u-boot映射到LAW分配的空间里。
Dcache中分配空间做堆栈
程序跑到这里,就要进入第一个C函数了。C函数的运行至少需要栈空间,但这时,RAM还没有初始化,只能在Dcache中锁定一定的空间,用做C的栈空间。
switch_as函数在Dcache中锁定16k的空间。
下面的几行代码将堆栈指针指向刚刚分配好的Dcache空间。
/* Setup the stack in initial RAM,could be L2-as-SRAM or L1 dcache*/
lis r1,CONFIG_SYS_INIT_RAM_ADDR@h
ori r1,r1,CONFIG_SYS_INIT_SP_OFFSET@l
li r0,0
stwu r0,-4(r1)
stwu r0,-4(r1) /* Terminate call chain */
cpu_init_f函数
该函数是系统执行的第一个C语言的函数,主要是做一些CPU 寄存器的初始化,其中最重要的部分是初始化Local Access Windows的值、Local Bus上的片选BR,OR的值和配置MMU的LTB1、LTB0。这些值需要在/include/configs/P2020DS.h中配置好。
board_init_f函数
该函数为板级初始化的第一个函数,会对板子上很多硬件外设做初始化,其中最重要的为init_sequence数组,该数组里面包含了很多板级的硬件初始化函数,在board_init_f函数中会依次的调用该数组中的函数去初始化各个硬件,该数组如下:
init_fnc_t *init_sequence[] = {
#if defined(CONFIG_BOARD_EARLY_INIT_F)
board_early_init_f,
#endif
#if defined(CONFIG_MPC85xx) || defined(CONFIG_MPC86xx)
probecpu,
#endif
#if !defined(CONFIG_8xx_CPUCLK_DEFAULT)
get_clocks, /* get CPU and bus clocks (etc.) */
#if defined(CONFIG_TQM8xxL) && !defined(CONFIG_TQM866M) /
&& !defined(CONFIG_TQM885D)
adjust_sdram_tbs_8xx,
#endif
init_timebase,
#endif
#ifdef CONFIG_SYS_ALLOC_DPRAM
#if !defined(CONFIG_CPM2)
dpram_init,
#endif
#endif
#if defined(CONFIG_BOARD_POSTCLK_INIT)
board_postclk_init,
#endif
env_init,
#if defined(CONFIG_8xx_CPUCLK_DEFAULT)
get_clocks_866, /* get CPU and bus clocks according to the environment variable */
sdram_adjust_866, /* adjust sdram refresh rate according to the new clock */
init_timebase,
#endif
init_baudrate,
serial_init,
console_init_f,
display_options,
#if defined(CONFIG_8260)
prt_8260_rsr,
prt_8260_clks,
#endif /* CONFIG_8260 */
#if defined(CONFIG_MPC83xx)
prt_83xx_rsr,
#endif
checkcpu,
#if defined(CONFIG_MPC5xxx)
prt_mpc5xxx_clks,
#endif /* CONFIG_MPC5xxx */
#if defined(CONFIG_MPC8220)
prt_mpc8220_clks,
#endif
checkboard,
INIT_FUNC_WATCHDOG_INIT
#if defined(CONFIG_MISC_INIT_F)
misc_init_f,
#endif
INIT_FUNC_WATCHDOG_RESET
#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)
init_func_i2c,
#endif
#if defined(CONFIG_HARD_SPI)
init_func_spi,
#endif
#ifdef CONFIG_POST
post_init_f,
#endif
INIT_FUNC_WATCHDOG_RESET
init_func_ram,
#if defined(CONFIG_SYS_DRAM_TEST)
testdram,
#endif /* CONFIG_SYS_DRAM_TEST */
INIT_FUNC_WATCHDOG_RESET
NULL, /* Terminate this list */
};
有阴影的部分在本系统内不采用。可以看到时钟,串口,控制台,内存等初始化函数的调用。
relocate_code函数
到目前为止,boot代码都是在Flash中运行,但是代码最终是要到RAM中运行的,在上面的board_init_f函数中已经将RAM初始化好了,具备了在RAM中运行程序的能力,现在relocate_code函数需要做两个事情:
1) 从Flash中拷贝u-boot的代码到RAM;
2) 记下现在执行代码的偏移,跳转到RAM中相应的位置执行。
board_init_r函数
该函数为板级初始化的第二阶段,主要是初始化PCI,PCIE,网口,Flash等设备,关闭看门狗,把前面借dcache做堆栈的空间解锁,还给cache。在一切设备都初始化好后,便会进main_loop的死循环中。















 1395
1395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









