









1.综述
前几篇的博文着重讨论了基于密度的聚类算法,我们逐层深入,先是散点的聚类算法(DBSCAN,OPTICS),在散点聚类的基础上,我们对二维线段的轨迹聚类进行了深入研究,其思想与DBSCAN如出一辙。那么,如果将线段再加一维–三维轨迹的聚类又会怎样呢?很自然地,我们完全可以进一步深化二维轨迹的聚类算法,无非是加了高度信息而已,所以其聚类思想不会超出DBSCAN。
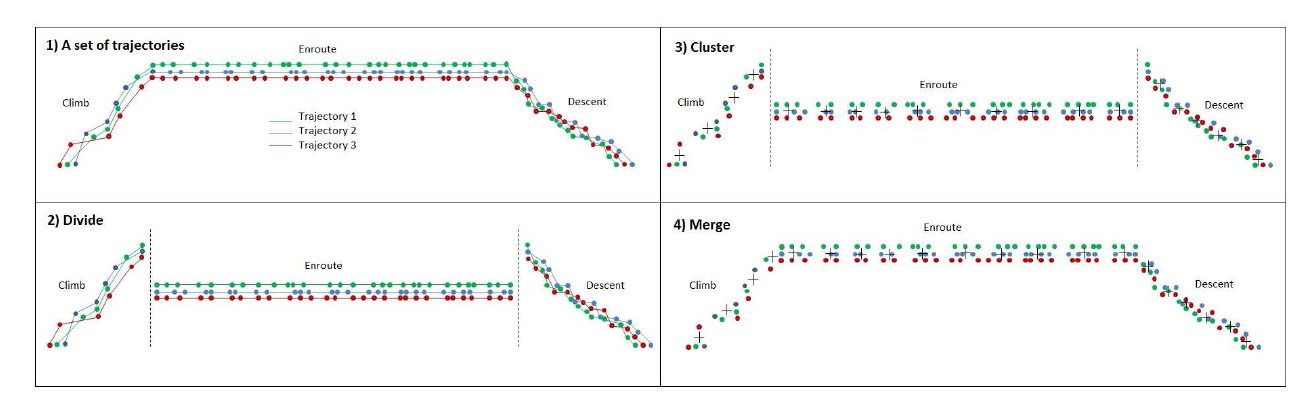
这篇博文要介绍一种具有应用背景的三维轨迹聚类算法–三维飞行轨迹聚类算法。原文分三个步骤:
1. 分割:将飞行姿态分为三种:爬升-航途-下降;
2. 聚类:分别对不同飞行姿态进行聚类;
3. 融合:将三段聚类结果融合为完整轨迹。
2.DICLERGE框架
对于DICLERGE框架的完整描述如下:
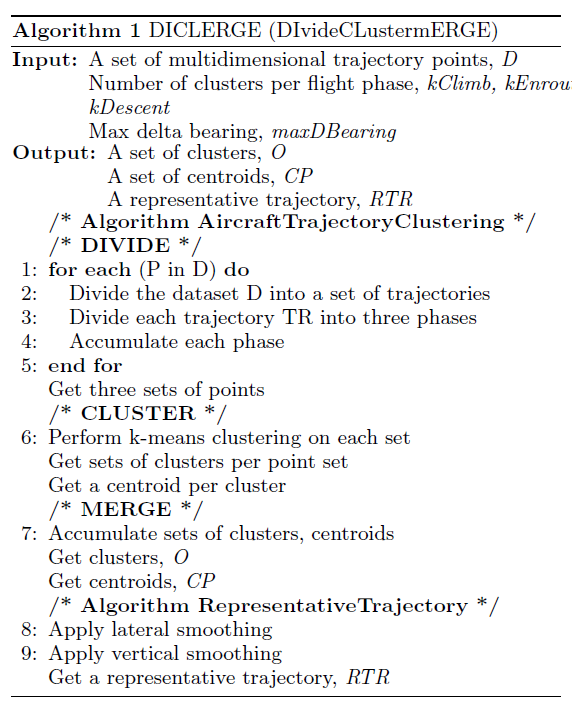
原文中轨迹的聚类算法采用的是K-Means算法,我们完全可以换成上篇博文提到的TRACLUS算法。
Reference:
DICLERGE: Divide-Cluster-Merge Framework for
Clustering Aircraft Trajectories, Samet Ayhan,Hanan Samet















 1651
1651











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









