






多传感器信息融合,卡尔曼滤波算法的轨迹跟踪与估计AEKF——自适应扩展卡尔曼滤波算法
AUKF——自适应无迹卡尔曼滤波算法
UKF——无迹卡尔曼滤波算法
三种不同的算法实现轨迹跟踪
ID:1965614439220968
专业算法工程师


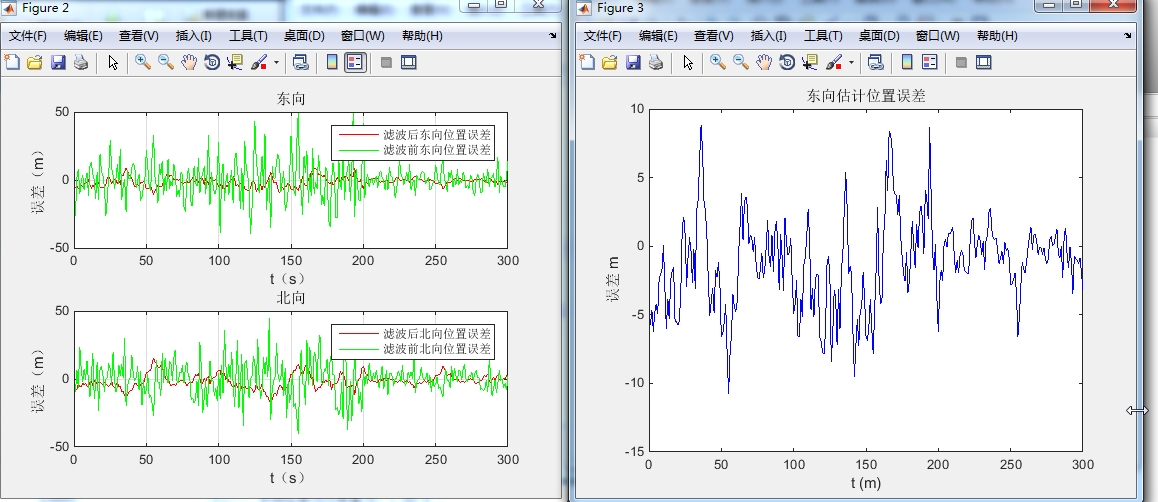

在多传感器信息融合中,轨迹跟踪与估计一直是非常重要的研究领域。在现实生活中,我们往往需要通过多个传感器来获取目标的位置和状态信息,以实现准确的轨迹跟踪。而卡尔曼滤波算法被广泛应用于轨迹跟踪中,因其良好的估计性能和鲁棒性而备受研究者的青睐。
其中,自适应扩展卡尔曼滤波算法(Adaptive Extended Kalman Filter, AEKF)、自适应无迹卡尔曼滤波算法(Adaptive Unscented Kalman Filter, AUKF)以及无迹卡尔曼滤波算法(Unscented Kalman Filter, UKF)是三种常用的卡尔曼滤波算法,可以用于目标的轨迹跟踪。
首先,我们将重点介绍自适应扩展卡尔曼滤波算法(AEKF)。AEKF是一种基于预测算法的轨迹跟踪方法,它通过自适应的方式调整卡尔曼滤波算法中的协方差矩阵,以适应不同的测量误差和目标运动模型。AEKF通过对传感器测量数据进行预处理,自动地调整协方差矩阵的大小,从而提高了轨迹跟踪的精度和鲁棒性。
接下来是自适应无迹卡尔曼滤波算法(AUKF)。AUKF是一种无迹卡尔曼滤波算法的改进版本,它通过对卡尔曼滤波算法中的状态变量进行无迹变换,使得卡尔曼滤波算法可以适应不同的非线性系统。AUKF通过使用无迹变换的方法,实现了传统卡尔曼滤波算法无法处理的非线性系统的轨迹跟踪。
最后是无迹卡尔曼滤波算法(UKF)。UKF是一种基于无迹变换的轨迹跟踪方法,它通过使用一组无迹变换点来近似目标状态的概率分布,从而实现对非线性系统的估计。UKF通过在非线性函数的近似点上进行采样,有效地解决了传统卡尔曼滤波算法在非线性系统中的局限性。
综上所述,多传感器信息融合中的轨迹跟踪与估计是一个非常复杂的问题,而卡尔曼滤波算法是一种被广泛应用的方法。本文介绍了自适应扩展卡尔曼滤波算法(AEKF)、自适应无迹卡尔曼滤波算法(AUKF)以及无迹卡尔曼滤波算法(UKF)三种不同的算法实现轨迹跟踪。通过对这些算法的介绍和比较,可以帮助读者了解不同算法在轨迹跟踪应用中的优劣势,并在实际场景中做出选择。
需要注意的是,不同算法适用
相关代码 程序地址:http://nodep.cn/614439220968.html















 252
252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









