






LBP等价模式
考察LBP算子的定义可知,一个LBP算子可以产生多种二进制模式(p个采样点)如:3x3邻域有p=8个采样点,则可得到2^8=256种二进制模式;5x5邻域有p=24个采样点,则可得到2^24=16777216种二进制模式,以此类推......。显然,过多的二进制模式无论对于纹理的提取还是纹理的识别、分类及信息存取都是不利的,在实际应用中不仅要求采用的算子尽量简单,同时也要考虑到计算速度、存储量大小等问题。因此需要对原始的LBP模式进行降维。
Ojala提出一种“等价模式”(Uniform Pattern)来对LBP算子进行降维,Ojala等认为图像中,某个局部二进制模式所对应的循环二进制数从0—>1或从1—>0,最多有两次跳变,该局部二进制模式所对应的二进制就成为一个等价模式。
如00000000,00111000,10001111,11111111等都是等价模式类。判断一个二进制模式是否为等价模式最简单的办法就是将LBP值与其循环移动一位后的值进行按位相与,计算得到的二进制数中1的个数,若个数小于或等于2,则是等价模式;否则,不是。除了等价模式以外的模式都归一一类,称为混合模式类,例如10010111(共四次跳变)。
跳变的计算方法:如10010111,首先第一二位10,由1—>0跳变一次;第二、三位00,没有跳变;第三、四位01,由0—>1跳变一次,第四、五位10,由1—>0跳变一次;第五六位01,由0—>1跳变一次;第六七位11,没有跳变;第七八位11,没有跳变;第八位和第一位11,没有跳变;故总共跳变4次。
通过这种改进,二进制模式的种类大大减少,而不会丢失任何信息,模式种类由原来的2^p减少为p*(p-1)+2种。
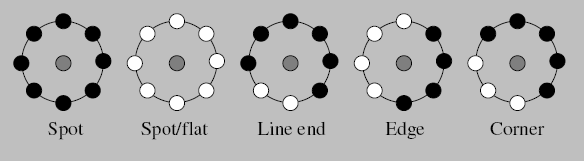
但等价模式代表了图像的边缘、斑点、角点等关键模式,等价模式占了总模式中的绝大多数,所以极大的降低了特征维度。利用这些等价模式和混合模式类直方图,能够更好地提取图像的本质特征。
1、LBPFeature.h

#include <iostream> #include <opencv2/opencv.hpp> using namespace std; using namespace cv; class LBPFeature { public: //LBP uchar table[256];//查找表 Mat LbpImg;//Lbp图像 Mat Lbp59Mat; //返回的mat是一个59维的矩阵 32FC1; public: int getHopCount(int i);// 获取i中0,1的跳变次数 void lbp59table(uchar *table);// 降维数组 由256->59 void uniformLBP(Mat &image, Mat &LbpImg, Mat &Lbp59Mat, uchar *table);//得到等价模式lbp值 LBPFeature(void); ~LBPFeature(void); };
2、LBPFeature.cpp
#include <iostream> #include <opencv2/opencv.hpp> #include "LBPFeature.h" using namespace std; using namespace cv; //*******获取图像的lbp值 等价模式****** LBPFeature::LBPFeature(void) { } LBPFeature::~LBPFeature(void) { } // 获取i中0,1的跳变次数 int LBPFeature::getHopCount(int i) { int a[8] = { 0 }; int cnt = 0; int k = 7; // 转换为二进制 while (i) { // 除2取余 a[k] = i % 2; a[k] = i & 1; // 除2取整 i/=2; i = i >> 1; --k; } // 计算跳变次数 for (k = 0; k < 7; k++) { if (a[k] != a[k + 1]) { ++cnt; } } // 注意,是循环二进制,所以需要判断是否为8 if (a[0] != a[7]) { ++cnt; } return cnt; } // 建立等价模式表 void LBPFeature::lbp59table(uchar *table) { //将已开辟内存空间 为256的table的值赋值为0。 memset(table, 0, 256); uchar temp = 1; for (int i = 0; i < 256; i++) { // 跳变次数<=2 的为非0值 if (getHopCount(i) <= 2) { table[i] = temp; temp++; } } } //降维数组 由256->59 void LBPFeature::uniformLBP(Mat &image, Mat &LbpImg, Mat &Lbp59Mat, uchar *table) { Lbp59Mat = Mat::zeros(1, 59, CV_32FC1); float saveResult[59] = { 0.0 }; LbpImg.create(Size(image.cols, image.rows), image.type()); for (int y = 1; y < image.rows - 1; y++) { for (int x = 1; x < image.cols - 1; x++) { //得到邻域像素值 uchar neighbor[8] = { 0 }; neighbor[0] = image.at<uchar>(y - 1, x - 1); neighbor[1] = image.at<uchar>(y - 1, x); neighbor[2] = image.at<uchar>(y - 1, x + 1); neighbor[3] = image.at<uchar>(y, x + 1); neighbor[4] = image.at<uchar>(y + 1, x + 1); neighbor[5] = image.at<uchar>(y + 1, x); neighbor[6] = image.at<uchar>(y + 1, x - 1); neighbor[7] = image.at<uchar>(y, x - 1); //得到中心像素值 uchar center = image.at<uchar>(y, x); uchar temp = 0; for (int k = 0; k < 8; k++) { // 计算LBP的值 temp += (neighbor[k] >= center)* (1 << k); } // 降为59维空间 LbpImg.at<uchar>(y, x) = table[temp]; int value = LbpImg.at<uchar>(y, x); for (int k = 0;k<59;k++) { if (value == k) { saveResult[k ]++; } } } } for (int i = 0;i<59;i++) { float v59 = saveResult[i]; Lbp59Mat.at<float>(0, i) = v59; } }
(二)LBP特征
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征;
1、LBP特征的描述
原始的LBP算子定义为在3*3的窗口内,以窗口中心像素为阈值,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数(通常转换为十进制数即LBP码,共256种),即得到该窗口中心像素点的LBP值,并用这个值来反映该区域的纹理信息。如下图所示:

LBP的改进版本:
原始的LBP提出后,研究人员不断对其提出了各种改进和优化。
(1)圆形LBP算子:
基本的 LBP算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对 LBP 算子进行了改进,将 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子;

(2)LBP旋转不变模式
从 LBP 的定义可以看出,LBP 算子是灰度不变的,但却不是旋转不变的。图像的旋转就会得到不同的 LBP值。
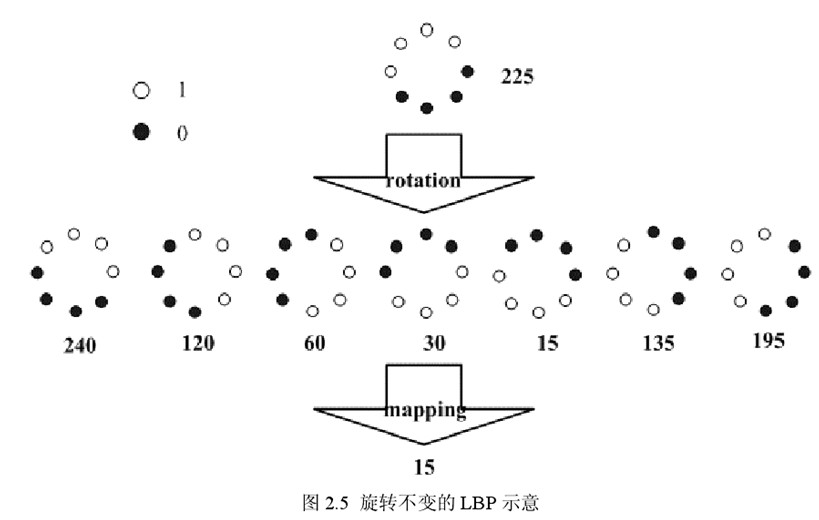
Maenpaa等人又将 LBP算子进行了扩展,提出了具有旋转不变性的 LBP 算子,即不断旋转圆形邻域得到一系列初始定义的 LBP值,取其最小值作为该邻域的 LBP 值。
图 2.5 给出了求取旋转不变的 LBP 的过程示意图,图中算子下方的数字表示该算子对应的 LBP值,图中所示的 8 种 LBP模式,经过旋转不变的处理,最终得到的具有旋转不变性的 LBP值为 15。也就是说,图中的 8种 LBP 模式对应的旋转不变的 LBP模式都是00001111。
(3)LBP等价模式
一个LBP算子可以产生不同的二进制模式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生P2种模式。很显然,随着邻域集内采样点数的增加,二进制模式的种类是急剧增加的。例如:5×5邻域内20个采样点,有220=1,048,576种二进制模式。如此多的二值模式无论对于纹理的提取还是对于纹理的识别、分类及信息的存取都是不利的。同时,过多的模式种类对于纹理的表达是不利的。例如,将LBP算子用于纹理分类或人脸识别时,常采用LBP模式的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP模式进行降维,使得数据量减少的情况下能最好的代表图像的信息。
为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)(这是我的个人理解,不知道对不对)。
通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的2P种减少为 P ( P-1)+2种,其中P表示邻域集内的采样点数。对于3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种,这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
2、LBP特征用于检测的原理
显而易见的是,上述提取的LBP算子在每个像素点都可以得到一个LBP“编码”,那么,对一幅图像(记录的是每个像素点的灰度值)提取其原始的LBP算子之后,得到的原始LBP特征依然是“一幅图片”(记录的是每个像素点的LBP值)。

LBP的应用中,如纹理分类、人脸分析等,一般都不将LBP图谱作为特征向量用于分类识别,而是采用LBP特征谱的统计直方图作为特征向量用于分类识别。
因为,从上面的分析我们可以看出,这个“特征”跟位置信息是紧密相关的。直接对两幅图片提取这种“特征”,并进行判别分析的话,会因为“位置没有对准”而产生很大的误差。后来,研究人员发现,可以将一幅图片划分为若干的子区域,对每个子区域内的每个像素点都提取LBP特征,然后,在每个子区域内建立LBP特征的统计直方图。如此一来,每个子区域,就可以用一个统计直方图来进行描述;整个图片就由若干个统计直方图组成;
例如:一幅100*100像素大小的图片,划分为10*10=100个子区域(可以通过多种方式来划分区域),每个子区域的大小为10*10像素;在每个子区域内的每个像素点,提取其LBP特征,然后,建立统计直方图;这样,这幅图片就有10*10个子区域,也就有了10*10个统计直方图,利用这10*10个统计直方图,就可以描述这幅图片了。之后,我们利用各种相似性度量函数,就可以判断两幅图像之间的相似性了;
3、对LBP特征向量进行提取的步骤
(1)首先将检测窗口划分为16×16的小区域(cell);
(2)对于每个cell中的一个像素,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数,即得到该窗口中心像素点的LBP值;
(3)然后计算每个cell的直方图,即每个数字(假定是十进制数LBP值)出现的频率;然后对该直方图进行归一化处理。
(4)最后将得到的每个cell的统计直方图进行连接成为一个特征向量,也就是整幅图的LBP纹理特征向量;
然后便可利用SVM或者其他机器学习算法进行分类了。















 3802
3802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









