






4.1串的定义
串(字符串),是由多个字符组成的线性表,是一种内容受限的线性表
串长:串中字符的个数
空串:零个字符的串
子串:串中任意个连续的字符组成的子序列。包含字串的串相应称为主串
真子串:不包含本身的子串
空格串:由一个或多个空格组成的串
字串位置:子串中第一个字符在主串中出现的位置
串相等:两个串的长度相同并且各个位置的字符都相同
4.3串的类型定义,存储结构及其运算
4.3.1串的抽象数据类型定义:p89
4.3.2串的存储结构
串的存储结构包括顺序存储结构和链式存储结构
一.串的顺序存储结构(使用更多)
类型定义:
#define MAXSIZE 255 //设置串的最大长度
typedef struct
{
char ch[MAXSIZE+1]; //存储串的一维数组。多数情况下,串的下标从1开始,下标为0的位置闲置
int length; //故设置空间为MAXSIZE+1
}SString; 一般情况下,为了便于操作,串的下标为0的位置闲置,从下标为1的位置开始存储
二.串的链式存储结构
字符占1type,二指针占4type,如果每个字符都只占一个结点,那么存储密度过小。因此采用块链结构存储链串
结构示意图:

类型定义:
#define chunksize 80; //块的最大长度
typedef struct Chunk //定义块
{
char Chunk[chunksize]; //每个块所存储的字符的空间
Chunk *next; //指向下一个块的指针
}Chunk;
typedef struct //定义链串
{
Chunk *head,*tail; //头尾指针
int length; //串当前的长度
}LString;4.3.3串的模式匹配算法
子串的定位运算通常称为串的模式匹配或串匹配。一般将主串S称为正文串,将子串T称为模式串。该算法即在主串中查找子串
一.BF算法(暴力破解)
算法4.1BF算法
算法步骤:1.分别利用指针i和j指示主串S和模式串T当前正待比较的字符位置,i初值为pos,j初值为1
2.如果两个串均未到达串尾,即i和j分别小于S和T的串长时,则循环执行:
*1.S.ch[i]和T.ch[j]比较,如果相等,则都指向下一位置
*2.如果不相同,指针后退重新匹配,从主串的下一字符(i = i - j + 2)起再重新和模式串第一个字符比较
3.如果j>T.length,说明匹配成功,返回字串位置(i-T.length),否则失败,返回0
关于(i = i-j+2)的解释:i = i - j + 2是i从当前位置减去已经匹配过j次的长度j,回到最初的位置,然后再+1到下一位置重新匹配(+2————i-j+1+1,从下标1开始存储)
算法描述:
int Index_BF(SString S,SString T,int pos)(1<=pos<=S.length)
{
int i = pos,j = 1; //j表示模式串匹配位置,i表示文本串匹配位置
while(i<=S.length&&j<=T.length) //循环条件
{
if(S.ch[i]==T.ch[j]) //比较两串
{
i++,j++; //如果匹配成功,则两者均后移继续匹配
}
else //如果匹配失败,i和j都要回溯,i要回到开始的下一位,j从头
{i=i-j+2,j = 1;}
}
if(j>T.length) //匹配成功,返回字串位置
return i - T.length;
else //匹配失败,返回0
return 0;
}算法分析:设m和n分别为子串和主串长
最好情况下,平均时间复杂度为O(m+n)
最坏情况下,平均时间复杂度为O(m*n)
算法4.2KMP算法(下标从1开始)
前缀:包含首字母,不包含尾字母的所有子串
后缀:包含尾字母,不包含首字母的所有子串
最长相等前后缀:某个字符前(不包含本身)的子串的最长的相等的前后缀长度
前缀表:模式串中每个字符其前的最长相等前后缀的长度组成的顺序表
设文本串"aabbaabbaaf',模式串"aabbaaf"
| 主串 | a | a | b | a | a | b | a | a | f | |
| 子串 | a | a | b | a | a | f | ||||
| 下标 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 前缀表 | 0 | 1 | 2 | 1 | 2 | 3 |
如上图匹配过程中,找出与f前的后缀相等的前缀的后一位继续匹配,其下标即是最长相等前后缀的长度加1,即f对应的前缀表
next数组:用来存储前缀表的数组
手算next数组:规定next[1] = 0,next[2] = 1;
next[j]:模式串中第j位字符的前j-1位字符组成的子串的最长相等前后缀长度+1(下标从1开始),也是匹配冲突时需要回溯的下标值
next数组的代码实现
void GetNext(SString T,int next[])
{
int i = 1,j = 0; //设置初始比较位置
next[0] = 0; //初赋值
while(i < T.length) //循环条件
{
if(j==0||T.ch[i]==T.ch[j]) //找最大相对前后缀,每有一个前缀字符和后缀字符相等,最大
{ //数+1,并填入当前位置的前缀表,ij同时后移比较下一个
next[++i]=++j;
}
else
j = next[j]; //如果不同,相当于j回溯比较,再跟之前的比,找前后缀
}
}算法4.2KMP算法
算法描述:
int KMPindex(SString S,SString T,int pos)
{
int i = pos,j = 1; //i表示主串开始查找的位置,j表示模式串开始比较的位置
while(i<=S.length&&j<=T.length) //条件
{
if(j==0||S.ch[i]==T.ch[j]) //如果匹配成功
{
i++,j++; //后移继续匹配
}
else //匹配失败
j = next[j]; //模式串回溯到前缀表指示的位置(相当于模式串右移,相等前
} //缀跑到相等后缀的位置继续比较
if(j>T,length) //匹配成功
return i-T.length;
else //匹配失败
return 0;
}4.4数组
4.4.1数组的类型定义
数组是由类型相同的数据元素构成的有序集合,每个元素称为数组元素
一维数组可以看成是一个线性表,二维数组可以看成数据元素是线性表的线性表
二维数组的逻辑结构:非线性结构:每个数据元素即在行表中,也在列表中
线性结构:该线性表的每个元素依然是线性表
三维数组:二维数组中的元素又是一维数组
n维数组:n-1维数组中的元素又是一个一维数组
数组一旦被定义,它的维数和维界就不再改变。因此除了初始化和销毁之外,数组只有存取元素和修改元素的操作。
结论:线性表是数组结构的特例,数组结构是线性表的拓展
4.4.2数组的顺序存储
由于数组一般不做插入或删除操作,因此采用顺序存储结构表示数组比较合适
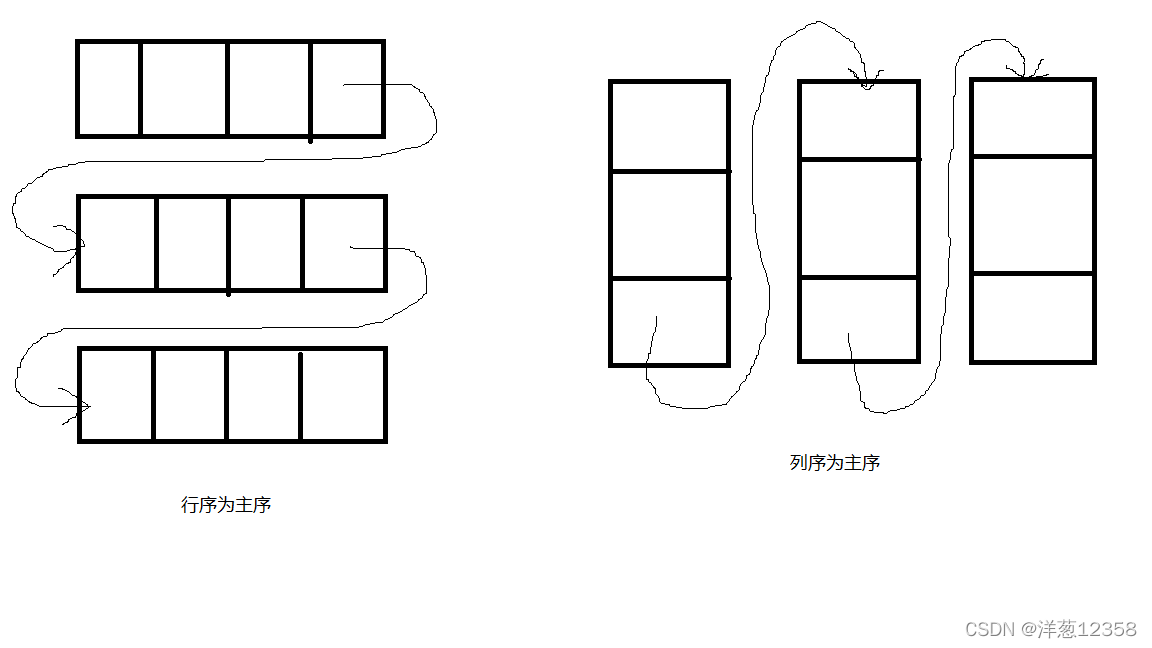
由于存储单元是一维结构,而数组可能是多维结构。则用一组连续存储单元存放数组元素就有约定次序的问题(即多维关系如何映射到一维关系)
①:以行序为主序的存储方式
②:以列序为主序的存储方式
由此,对于数组,一旦规定了其维数和维界,便可为其分配空间。反之,只要给出一组下标便可求出相应数组元素的存储位置:
一维数组:
(i为前面元素个数,L为每个元素所占空间)
二维数组:
(前i行都填满了,j为本行前有多少元素)
三维数组a[m1][m2][m3]:
以此类推
4.4.3特殊矩阵的压缩存储
在数值分析中经常出现阶数很高的矩阵,同时矩阵中有很多值相同的元素或0元素。为了节约存储空间,可以对这类矩阵进行压缩存储。
压缩存储:多个值相同的元只分配一个存储空间,对零元不分配空间
假若相同的元素或零元素在矩阵中的分布有一定规律,或0元多。则称此类矩阵为特殊矩阵,主要包括:对称矩阵,三角矩阵,对角矩阵,稀疏矩阵等。
1.对称矩阵
对称矩阵中的元满足以下特性
1<=i,j<=n
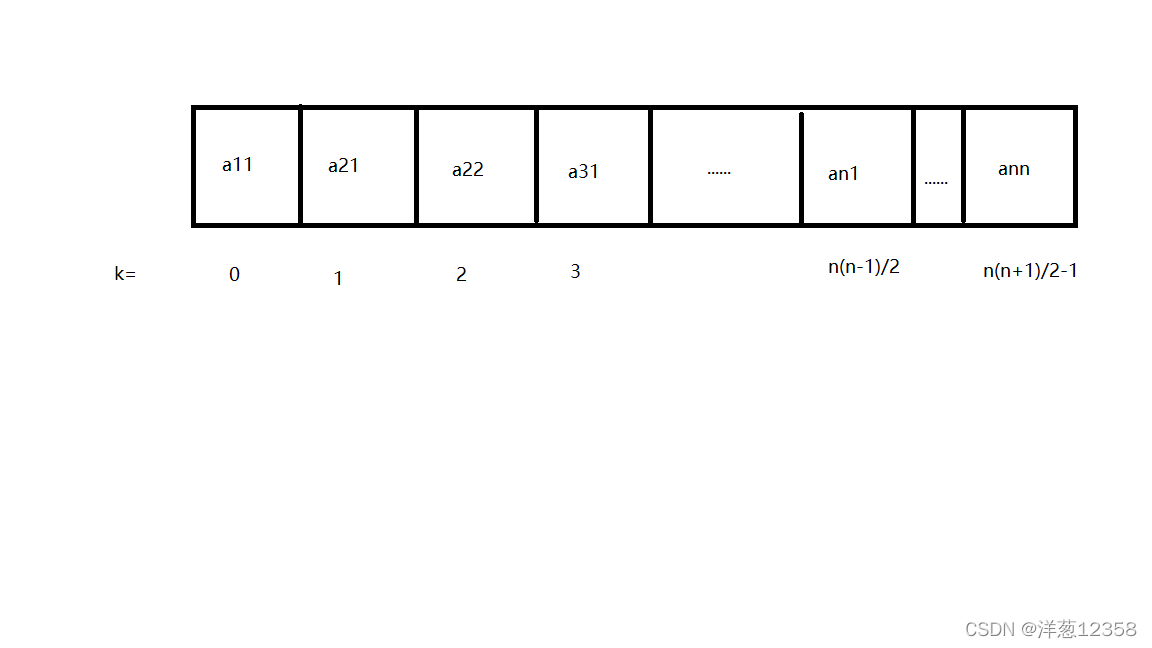
对于对称矩阵,可以为每一对对称元分配一个存储空间。则可将n^2个元压缩到n(n-1)/2个元的空间中,以行序为主序存储其下三角(包括对角线)中的元。
假设以一维数组sa[n * (n - 1) / 2]作为n阶对称矩阵A的存储结构,则sa[k]和矩阵元a_{i,j}存在一一对应的关系如下:
ps:前有i行,共i(i-1)/2个元素,加上本行前j-1个元素
k = 0,1,2....n(n+1)/2-1
2.三角矩阵
以主对角线划分,三角矩阵有上三角矩阵和下三角矩阵。上三角矩阵是指矩阵下三角(不包括对角线)中的元均为常数c或0的n阶矩阵。下三角矩阵与之相反。
对三角矩阵进行压缩存储,除了和对称矩阵一样,再加一个存储常数c的存储空间即可
(1)上三角矩阵
sa[k]和矩阵元aij之间的关系为
(2)下三角矩阵
sa[k]和矩阵元aij之间的关系为
3.对角矩阵
对角矩阵的所有非零元都集中在以对角线为中心的带状区域中。也可按某个规则(或以行为主,或以对角线为主的顺序)压缩到一个一维数组上
例:以对角线存储(二维数组)
结果为
4.稀疏矩阵
稀疏矩阵:在m*n的矩阵中有t个非零元,设
若 则称该矩阵为稀疏矩阵
稀疏矩阵的存储方法有:三元组法,十字链表法
(1)三元组法
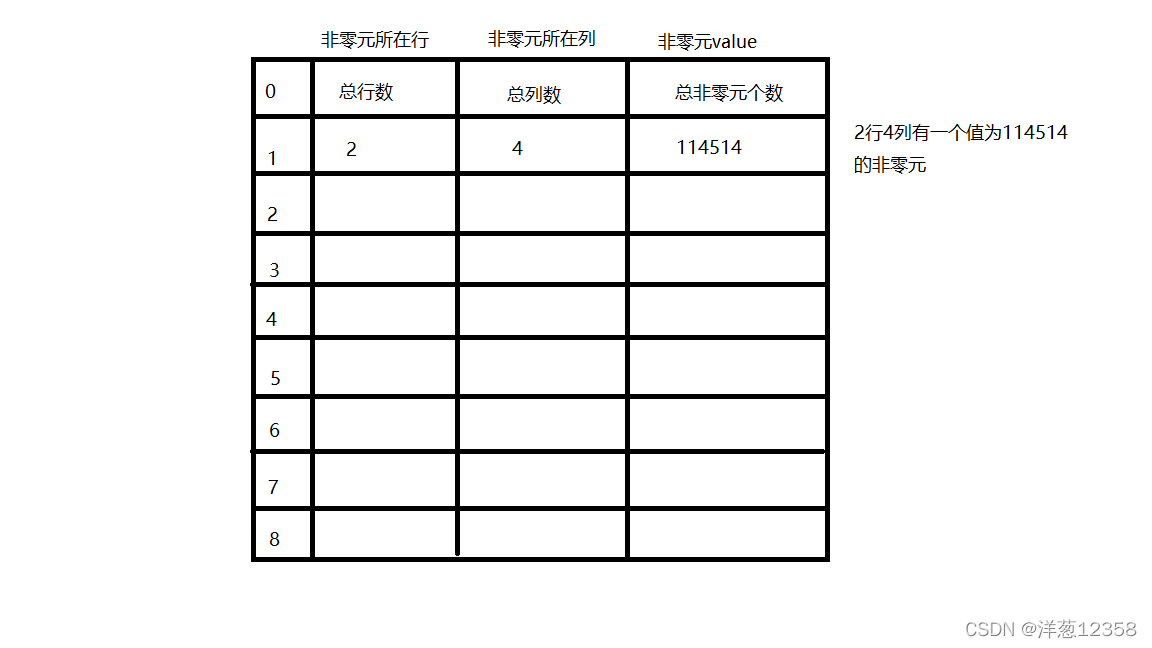
三元组(i,j,aij)和矩阵维数m*n——唯一确定矩阵中的一个非零元
压缩存储原则:存各非零元的值,行列位置和矩阵行列数。
三元组的不同表示方法可以决定稀疏矩阵不同的压缩存储方法。
注:为更可靠的描述信息,通常再加一个总体信息:总行数,总列数,总非零元个数(通常存放在0下标位置)
优点:非零元在表中按行序有序存储,便于进行依行序顺序处理的运算
缺点:不能随机存取,若按行号查找某一行中的非零元,需从头查找
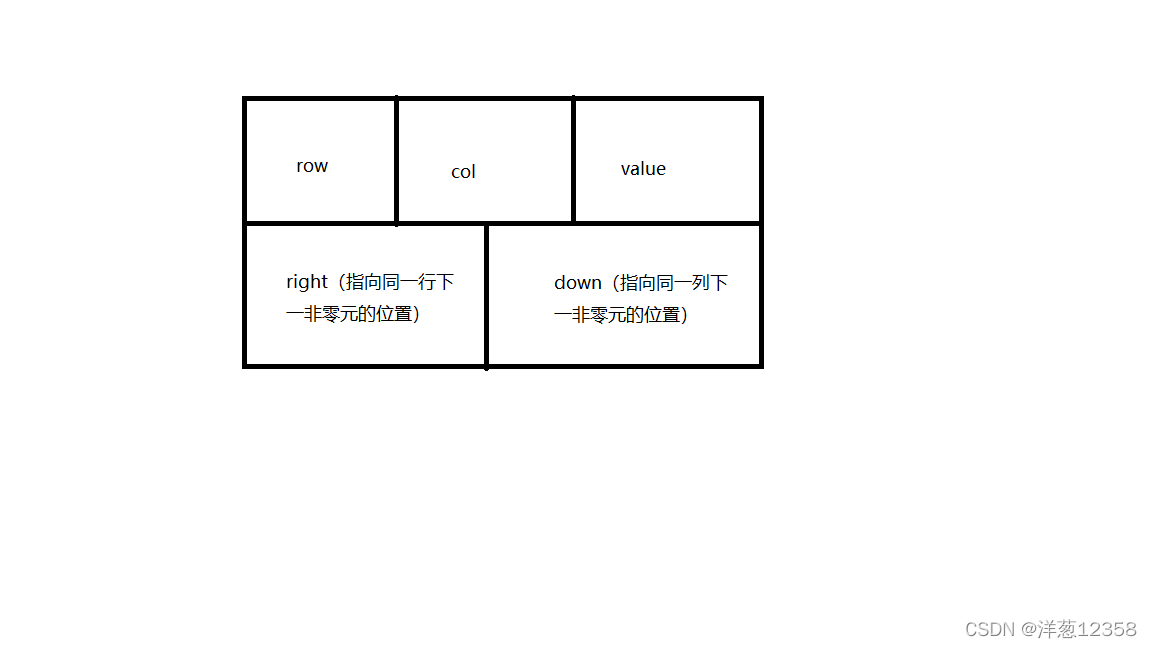
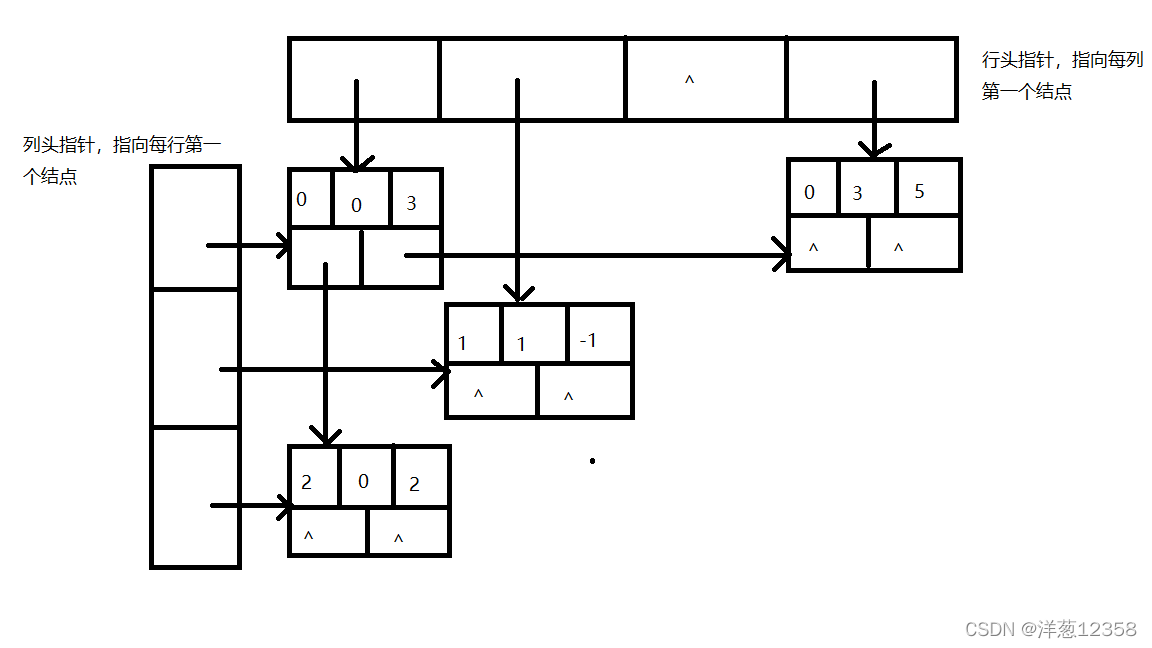
(2)十字链表法
优点:灵活地插入因运算产生的新非零元素,删除因运算产生的新0元,实现各种运算
结点结构:
例:对于矩阵
其十字链表结构为:
4.5广义表
4.5.1广义表的定义
LS = (a1,a2....an)
LS是广义表表名,n是表长,ai称为元素。元素既可以是单个元素(原子),也可以是广义表(子表)。习惯上大写字母表示广义表,小写字母表示原子。
表头:广义表的第一个元素,可以是单原子,也可以是子表
表尾:取出除了表头以外的元素构成的表。表尾一定是广义表
例: A = ()——长度为0,深度为1
B = (e)——只有一个原子e,长度为1,深度为1,表头为e,表尾为()
C = (a,(b,c,d))——长度为2,深度为2,表头为a,表尾为((b,c,d))
D = (A,B,C)——D = ((),(e),(a,(b,c,d)))——长度为3,深度为3,表头为()
表尾为((e),(a,(b,c,d)))
E = (a,E)——E = (a,(a,(a,....)))——长度为2,深度无穷,表头为a,表尾为(E)
F = (())——长度为1,深度为2,表头表尾均为()
广义表的性质:
(1)广义表中元素有相对次序,一个直接前趋,一个直接后继
(2)广义表长度定义为最外层括号包含的元素个数
(3)广义表深度定义为该广义表展开后所含括号的重数
注:原子深度为0,空表深度为1
(4)广义表的元素可以是子表,子表的元素还可以是子表......。所以广义表是一个多层次的 结构
(5)广义表可为其他广义表共享:即广义表的元素是另一个广义表
(6)广义表可以是一个递归的表,即广义表可以是本身的一个子表















 3581
3581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









