







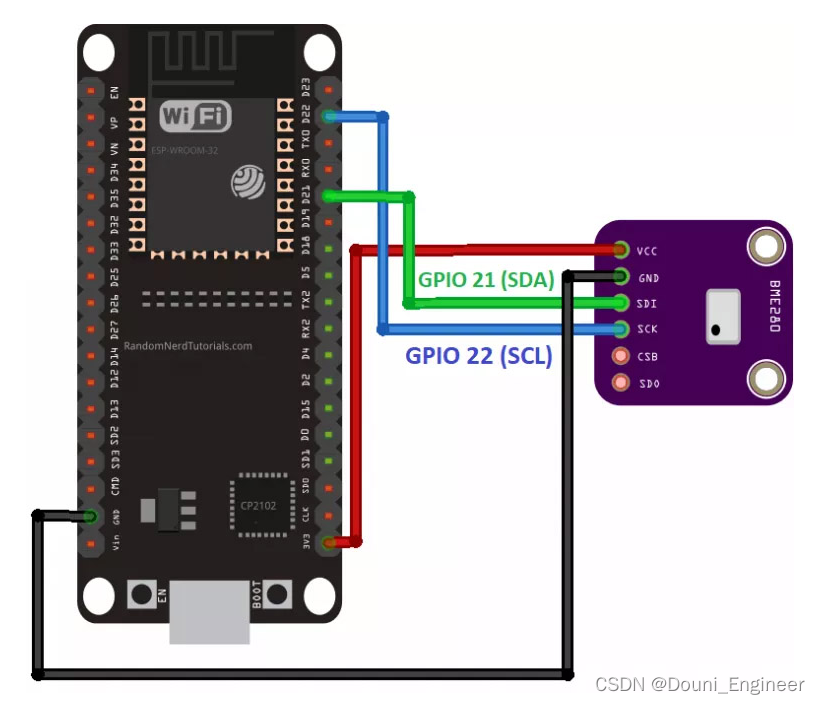
ESP32 Client-Server Wi-Fi Communication Between Two Boards

/*
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp32-client-server-wi-fi/
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*/
// Import required libraries
#include "WiFi.h"
#include "ESPAsyncWebServer.h"
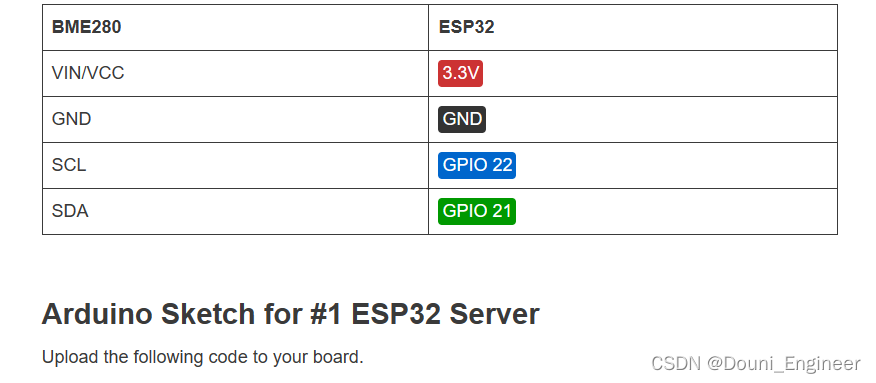
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
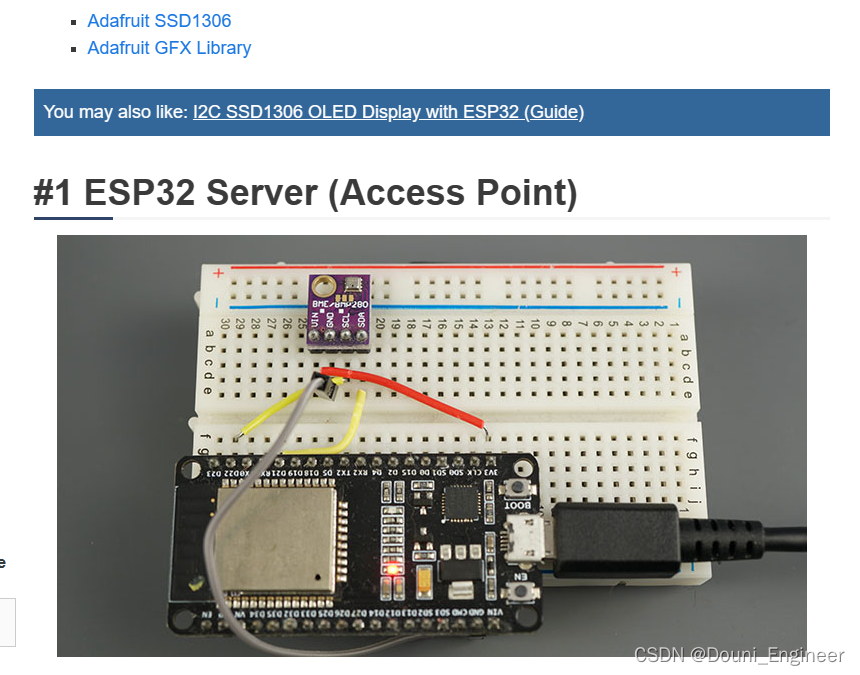
// Set your access point network credentials
const char* ssid = "ESP32-Access-Point";
const char* password = "123456789";
/*#include <SPI.h>
#define BME_SCK 18
#define BME_MISO 19
#define BME_MOSI 23
#define BME_CS 5*/
Adafruit_BME280 bme; // I2C
//Adafruit_BME280 bme(BME_CS); // hardware SPI
//Adafruit_BME280 bme(BME_CS, BME_MOSI, BME_MISO, BME_SCK); // software SPI
// Create AsyncWebServer object on port 80
AsyncWebServer server(80);
String readTemp() {
return String(bme.readTemperature());
//return String(1.8 * bme.readTemperature() + 32);
}
String readHumi() {
return String(bme.readHumidity());
}
String readPres() {
return String(bme.readPressure() / 100.0F);
}
void setup(){
// Serial port for debugging purposes
Serial.begin(115200);
Serial.println();
// Setting the ESP as an access point
Serial.print("Setting AP (Access Point)…");
// Remove the password parameter, if you want the AP (Access Point) to be open
WiFi.softAP(ssid, password);
IPAddress IP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(IP);
server.on("/temperature", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", readTemp().c_str());
});
server.on("/humidity", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", readHumi().c_str());
});
server.on("/pressure", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/plain", readPres().c_str());
});
bool status;
// default settings
// (you can also pass in a Wire library object like &Wire2)
status = bme.begin(0x76);
if (!status) {
Serial.println("Could not find a valid BME280 sensor, check wiring!");
while (1);
}
// Start server
server.begin();
}
void loop(){
}
。。。剩下的太多了懒得搬了















 2550
2550











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









