







一、AMCL算法引言
节选自中文版《概率机器人》8.3.5章节,amcl的算法实现如下图所示:
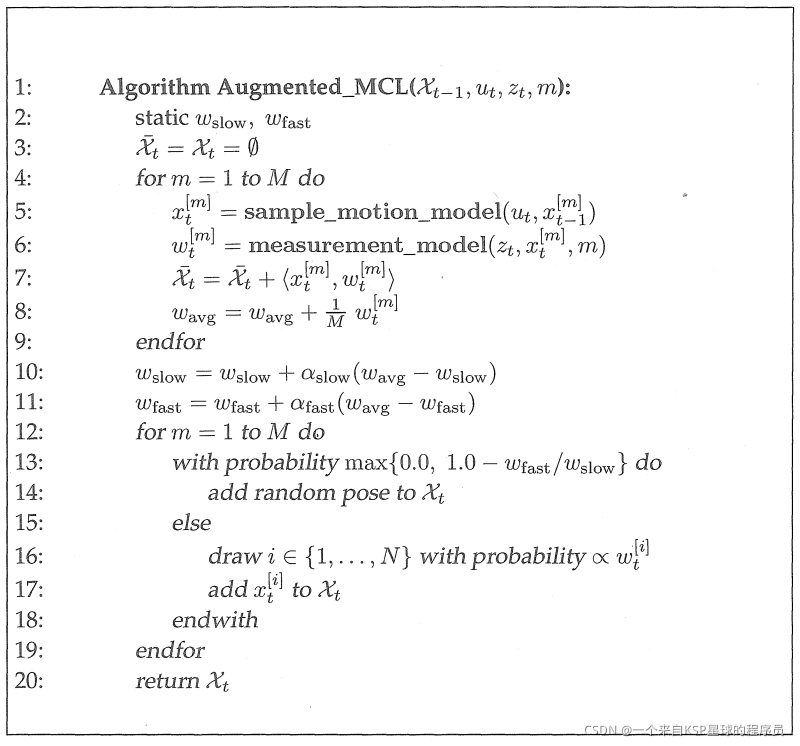
这里稍微对该算法的几个阶段做一些解释:
-
算法输入参数:
1、X_t-1:上一时刻的粒子集合;
2、u_t:运动过程中的控制量;
3、z_t:测量值;
4、m:粒子数量; -
初始化阶段
1、静态变量:Wslow是长期权重,Wfast是代表短期权重,用于重采样时判断是否需要添加新的随机粒子;
2、粒子集合:Xt(上划线)采样后粒子集合,Xt重采样后粒子集合 -
采样阶段
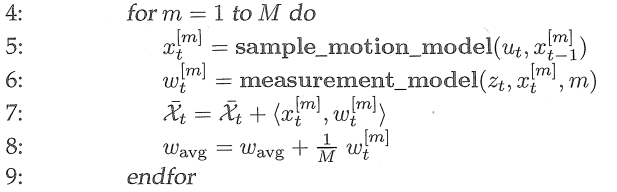
如上图算法所示,将每个上一时刻的粒子和运动过程的控制量作为参数,输入到运动模型(ODOM_MODEL_DIFF),获取到对当前时刻运动状态的预测x_t;然后,将该预测x_t、测量值z_t以及m作为参数,输入到测量模型(LikelihoodFieldModel),获取对当前时刻运动状态的预测的权重w_t;将预测位姿和预测权重作为粒子,放入粒子集合Xt(上划线)中,完成采样。 -
重采样阶段
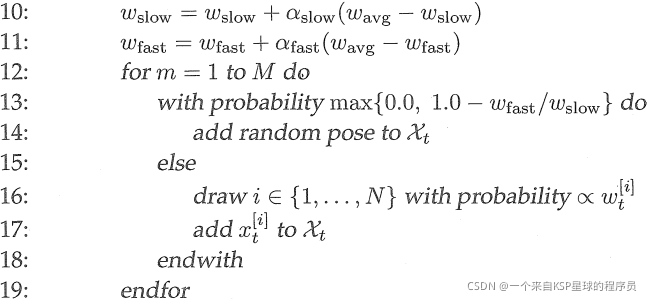
首先,更新w_fast和w_slow,其中要求参数:0 <= a_slow << a_fast 。然后对于粒子集合Xt(上划线)中的粒子,按照max{0.0, 1.0-w_fast/w_slow}的概率添加随机粒子到X_t集合中,即如果1.0-w_fast/w_slow小于0,则不添加随机粒子;如果大于0,则以1.0-w_fast/w_slow的结果作为概率,添加随机粒子。如果没有发生添加随机粒子,则进行重要性重采样(采样算法如下图所示),并将采样结果放入到粒子集合Xt中。
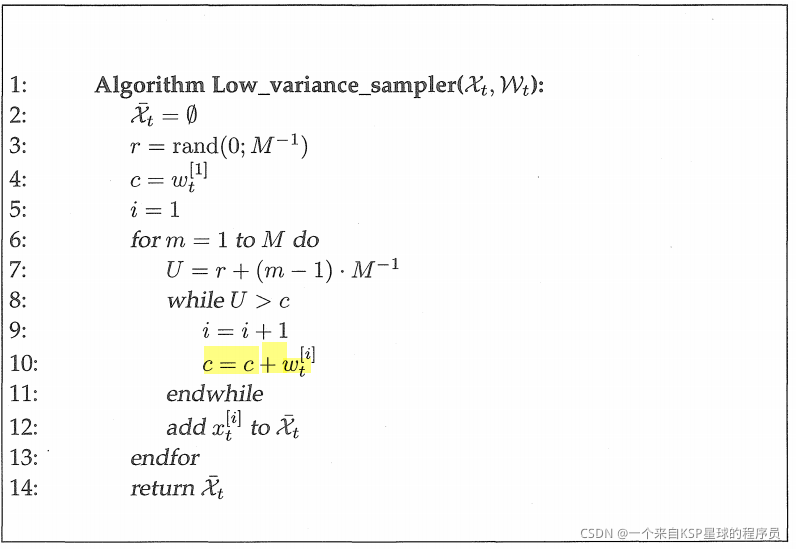
其实现原理如下图所示:
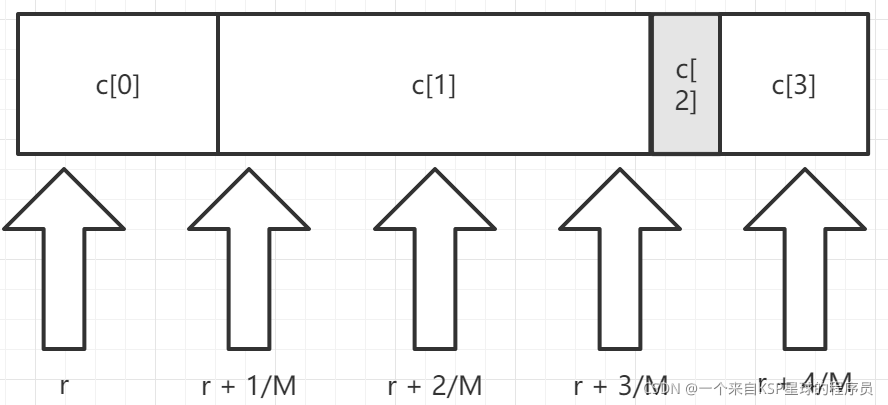
其中,c为采样前粒子集合的概率累积表,从第一个粒子开始,逐步累积该粒子的权重;r为固定的[0, 1/M]的随机数,r的值会才采样后按照采样数量(m-1) * 1/M进行递增;当U < c时,则进行采样,将粒子放入到新的粒子集合Xt(上划线)中。
amcl代码中的实现方式稍有不同,但原理是一样的,其实现如下图所示:
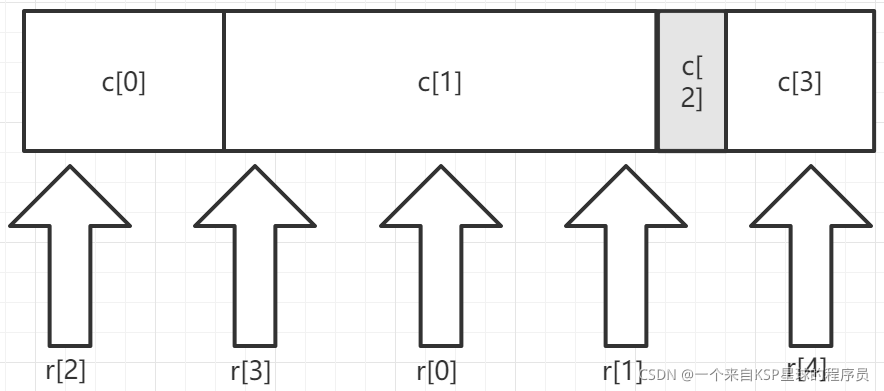
其中,r的值不再是固定的随机数,而是[0, 1]的随机数。判断条件则变为:c[i] < r < c[i + 1]。
可见,经过了重采样,c[2]粒子被排除了,粒子集中在了c[1]附近,实现了重采样对粒子进行筛选的目的。
下面,针对性解析上述算法的代码实现。
二、初始化部分代码解析
算法的初始化发送在函数AmclNode::handleMapMessage,当接收到地图的时候,完成算法相关的初始化工作,具体内容如下:
滤波器的创建
pf_ = pf_alloc(min_particles_, max_particles_,
alpha_slow_, alpha_fast_,
(pf_init_model_fn_t)AmclNode::uniformPoseGenerator,
(void *)map_);
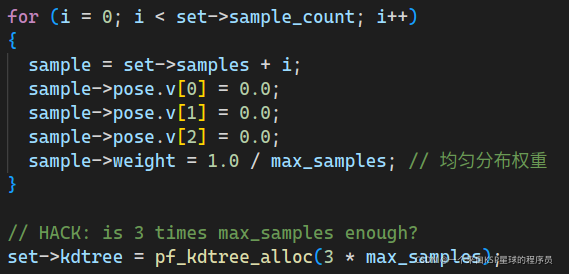
pf_alloc函数主要完成了:
- 创建两个粒子集合,粒子的初始位姿为0,均匀权重;
- 对于每个粒子集合,进行kd-tree初始化,树申请了3倍最大粒子数量的节点空间;
滤波器的初始化
// Initialize the filter
updatePoseFromServer();
pf_vector_t pf_init_pose_mean = pf_vector_zero();
pf_init_pose_mean.v[0] = init_pose_[0];
pf_init_pose_mean.v[1] = init_pose_[1];
pf_init_pose_mean.v[2] = init_pose_[2];
pf_matrix_t pf_init_pose_cov = pf_matrix_zero();
pf_init_pose_cov.m[0][0] = init_cov_[0];
pf_init_pose_cov.m[1][1] = init_cov_[1];
pf_init_pose_cov.m[2][2] = init_cov_[2];
pf_init(pf_, pf_init_pose_mean, pf_init_pose_cov); // alg_note: 以均值和协方差为0初始化滤波器
pf_init_ = false;
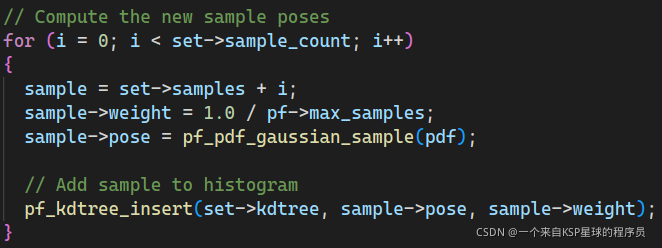
pf_init函数主要完成了:
- 根据从参数服务器获取的初始位姿(即初始均值)和协方差矩阵,调整当前正在使用的粒子集合的位姿,使其分布服从高斯分布;
- 将粒子集合插入kd-tree,重新计算聚类参数;
运动模型的初始化
// alpha1 旋转阶段中角度变化所导致的旋转噪音
// alpha2 旋转阶段中位置变化所导致的旋转噪音
// alpha3 平移阶段中位置变化所导致的平移噪音
// alpha4 平移阶段中角度变化所导致的平移噪音
delete odom_;
odom_ = new AMCLOdom();
ROS_ASSERT(odom_);
odom_->SetModel( odom_model_type_, alpha1_, alpha2_, alpha3_, alpha4_, alpha5_ );
对于ODOM_MODEL_DIFF模型,只用到了alpha1~4四个参数。
测量模型的初始化
delete laser_;
laser_ = new AMCLLaser(max_beams_, map_);
ROS_ASSERT(laser_);
if(laser_model_type_  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6472
6472











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









